Изобретение относится к горной промышленности, а конкретнее к землеройным машинам.
Известно устройство для разработки мягких пород способом обрушения,, включающее самоходную тележку, платформу с дйухканатной подвеской, рабочим органом и стабилизирующими кронштейнами fl ..
Однако двухканатная подвеска и стабилизирующие кронштейны платформы не обеспечивают точности при удержании машины в заданном направлении из-за неровной навивки кана- ов на барабан. Последнее объясняется различными изменениями длин канатов и диаметров навивки из-за их вытяжки и загрязнения.
Известна также машина для разработки пород, включающая самоходную тележку, платформу с канатной подвеской/ рабочим органом и датчиком положения блока канатной подвески 2.
Недостатком машины является низ-кая точность обеспечения направленного движения рабочего органа, особенно при значительных на него толчковых нагрузках в период входа рабочего органа в забой и при преодолении твердых включений. Это объясняется тем.
что перемещение -блока канатной подвески платформы осуществляется при раздвижке гидроцилиндра по дуге окружности с радиусом, равным длине корфмысла. Такая траектория обуславливает выполнение работы гидроцилиндром по перемещению платформы относительно канатной подвески в продольном направлении. При малых приращениях
10 силы сопротивления поступательному движению рабочего органа в процессе подрезания уступа эта работа незначительна и мало сказывается на процессе стабилизации положения рабочего орга15на в забое. При значитеиьных приращениях силы сопротивления выполнение работы по дополнительному перемещению платформы из-за конечной мощности гидроцилйндра приводит к замедлению
20 процесса восстановления первоначального положения платформы, снижается КПД узла стабилизации. В итоге снижается производительность машины.
Цель изобретения - повышение произ25водительности путем улучшения стабилизации положения рабочего органа.
Цель достигается тем, что машина для разработки пород способом обрушения, включающая самоходную тележку,
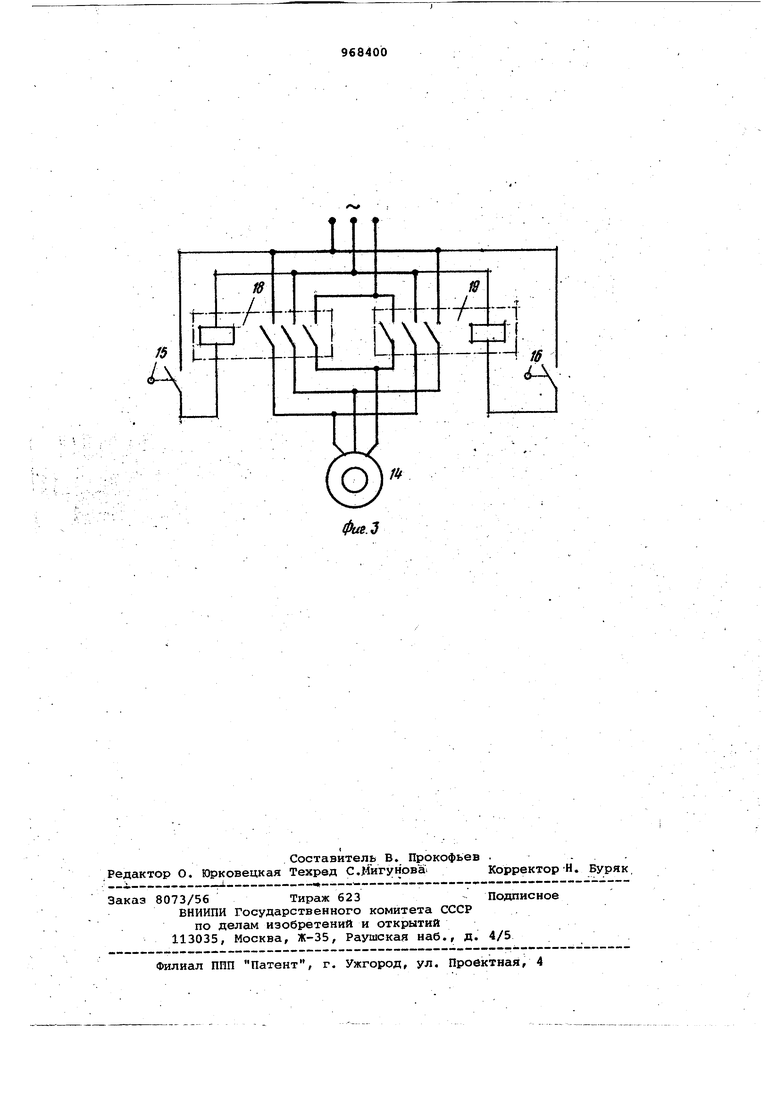
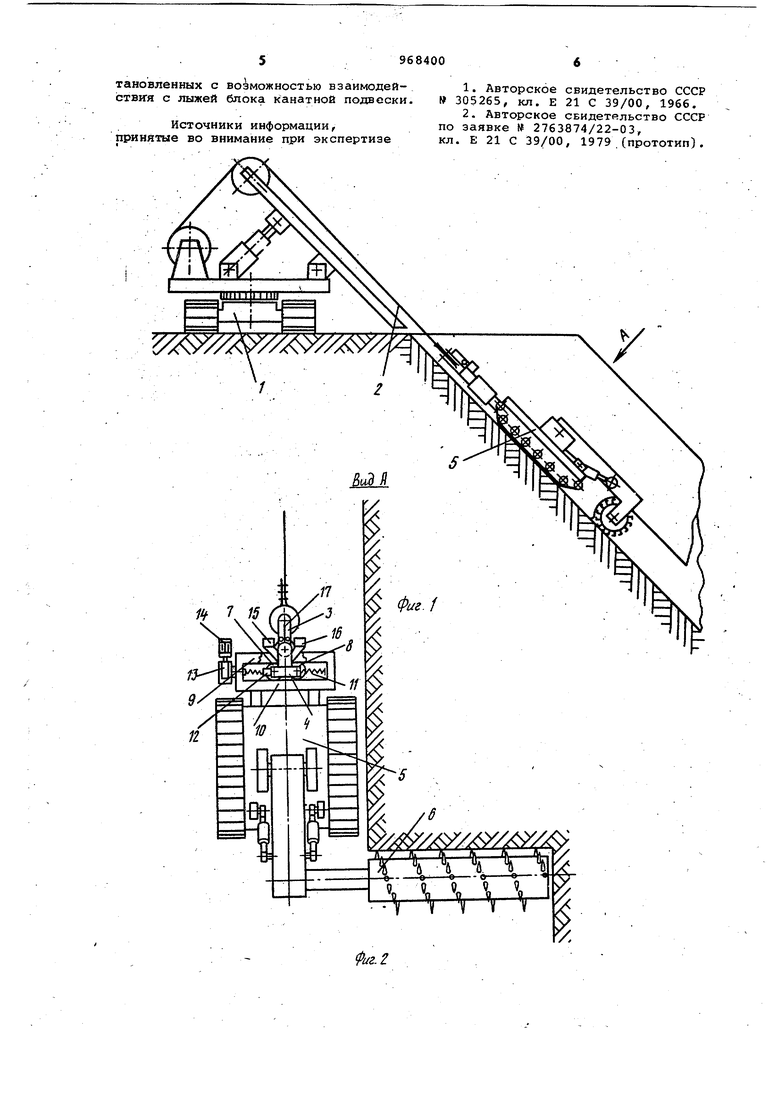
30 платформу с направляющими, канатную подвеску с блоком, рабочий орган и датчик положения блока канатной подвески, снабжена кареткой, установлен ной с возможностью перемещения посре ством привода по направляющим платфо мы и шарнирно связанной с блоком канатной подвески, имею1т1им лыжу, приче датчик положения блока канатной под- вески выполнен в виде, закрепленных н каретке выключателей привода каретки, установленных с возможностью взаимодействия с лыжей блока канатной.подв ески. На фиг. 1 изображена машина вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - электрическая схема привода . Машина включает самоходнуф тележку 1, расположенную на кровле уступа, которая связана при помощи канатной подвески 2 и блока 3, шарнирно закрепленного на каретке 4, с . платформой 5, имеющей рабочий орган Каретка 4 установлена на платформе 5 с возможностью перемещения при помощи роликов 7 и 8 по направляющим 9 и 10 и шарнирно прикреплена к блоку 3-канатной подвески 2. Приводной винт 11 находитсяс одной стороны в зацеплении с ходовой гайкой 12, прикрепленной к каретке 4, ас другой через редуктор 13 связан с элект родвигателем 14. На каретке 4 монтированы путевые выключатели 15 и 16, которые взаимодействуютс лыжей 17 блока 3 и включены в цепи питания магнитных пускателей 18 и 19, управляющих работой электродвигателя 14. Машина работает следующим образом При подрубке уступа платформа 5 с установленным на ней рабочим органом б При помощи лебедки самоходной тележки 1 и канатной подвески 2 пере мещается по -откосу уступа до верхней его кромки,. вырабатывая в уступе щел На консольно расположенный рабочий орган 6 действуют силы сопротивления, направленные против движения. Они создают крутящий .момент, развора чивающий машину в плане и выводящий рабочий орган б из щели. Для создания компенсирующего крутящего момента каретка 4 с блоком 3 канатной под вески 2 автоматически перемещаются относительно центра тяжести платформы 5. Как только платформу 5,начинаю разворачивать-в плане, например по часовой стрелке, путевой выключатель 15 надавливает своим рычагом на лы жу 17 блока 3, ось которого сохраняет направление оси канатной подвески 2, и замыкает электриче.скую цепь пит тания магнитного пускателя 18,который; включает электродвигат вль 14. Вращение вала электродвигателя 14 через редуктор 13 передается приводному винту 11, в результате чего ходовая гайка 12 и прикреплённая к -ней карет ка 4 перемещаются вправо настолькБ, что новое положение блока 3, шарнирно прикрепленного к каретке 4,, относительно центра тяжести платформы 5 обеспечивает появление компенсирующего крутящего момента, направленного против часовой стрелки. При этом платформа 5 восстанавливает первоначальное направление, путевой выключатели 15 отходит, от лыжи 17 блока 3, и рычаг путевого выключателя 15 возвращается в исходное положение. Магнитный пускатель 18, потеряв питание, отключает.от сети электродвигатель 14, Приводной винт 11 перест:а ет вращаться, и каретка 4.. останавливается. .г С уменьшением сил сопротивления движению рабочего органа б при поло-, жении блока 3, обеспечивающем заданное направление рабочего органа б до меньшения, платформу 5 начинают, разворачивать в- плане против часовой . стрелки. Путевой выключатель 16 включает магнитный пускатель 19, который подключает к сети электродвигатель. 14 с обратным чередованием фаз. Каретка 4 с шарнирно прикрепленным к не.й блоком 3 перемещается влево до нового положения блока 3 канатной подвески 2, в котором разворачивающий и компенсирующий моменты равны. Платформа 5 восстанавливает первонач,альное направление, и каретка 4 останавливается. Применение изобретения обеспечива- ет высокую точность ибыстроту стабилизации направленного движения рабочего органа как при малых прирашениях силы сопротивления поступательному движению его, так и при больших, высокий КПД привода каретки. Это способствует повышению производительности машины при разработке пород способом обрушения. Формула изобретения Машина для.разработки пород способом обрушения, включающая самоходную тележку, платформу с направляющими, канатную подвеску с блоком, рабочий орган и датчик положения блока канатной подвески, о. тл ичающа я ся тем, что, с целью повышения производительности путем улучшения стабилизации положения рабочего органа, она снабжена кареткой, установленной с воз.можностью перемещения посредством привода по направляющим пла тформы и шарнирно связанной с блоком канатной подвески, имеющим лыжу, причем датчик положения блока канатной подвески выполнен в виде закрепленных на.каретке выключателей привода каретки, ус59684006
тавовленных с возможностью взаимодей- 1. Авторское свидетельство СССР ствигя с льджей блока канатной подвески. 305265, кл. Е 21 С 39/00, 1966.
Источники информации,по заявке № 2763874/22-03,
принятые во внимание при экспертизе кл. Е 21 с 39/00, 1979 (прототип). Ш
2. Авторское свидетельство СССР Фие. V.. /S , f «- л. Т 1 у
16
i
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для разработки пород | 1979 |
|
SU800367A1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ МЯГКИХ ПОРОД СПОСОБОМ ОБРУШЕНИЯ | 1971 |
|
SU305265A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1990 |
|
RU2032294C1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ЛОКАЛИЗАЦИИ ВЗРЫВА | 2004 |
|
RU2266516C1 |
| УСТРОЙСТВО для РАЗРАБОТКИ МЯГКИХ ПОРОД СПОСОБОМ ОБРУШЕНИЯ | 1972 |
|
SU325382A1 |
| Устройство для разработки мягких пород способом обрушения | 1980 |
|
SU891930A2 |
| Экскавационная машина | 1988 |
|
SU1609878A1 |
| Система рулевого управления транспортного средства | 1983 |
|
SU1158430A1 |
| ЭКСКАВАЦИОННО-ТРАНСПОРТИРУЮЩИЙ КОМПЛЕКС | 2011 |
|
RU2456454C1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2226473C2 |