(54) ПЕРЕДВИЖНАЯ МЕХАНИЗИРОВАННАЯ БЕЗРАЗГРУЗОЧНАЯ
КРЕПЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Передвижная механизированная безразгрузочная крепь | 1976 |
|
SU618559A2 |
| Передвижная механизированная безразгрузочная крепь | 1973 |
|
SU483530A1 |
| Стенд для испытания верхняков | 1981 |
|
SU972116A1 |
| Секция механизированной крепи | 1975 |
|
SU605019A1 |
| Секция механизированной крепи | 1989 |
|
SU1643733A1 |
| Временная безразгрузочная крепь | 1978 |
|
SU825988A1 |
| Временная передвижная безразгрузочная крепь | 1987 |
|
SU1770583A1 |
| Механизированная крепь для отработки крутых пластов угля | 1979 |
|
SU899999A1 |
| Механизированный очистнойКОМплЕКС СОВМЕщЕННОй ВыЕМКи | 1978 |
|
SU798315A1 |
| Установка для установки верхняков при креплении подготовительных выработок | 1977 |
|
SU663847A1 |
1
Изобретение относится к горному елу, а именно к механизированным крепям, работающим в комплексе с проходческими комбайнами.
По основному авт.св. № 483530 известна передвижная механизированная безразгрузочная крепь, включающая раму с гидростойками и роликами, верхняки и рулонную сетку, при этом верхняки выполнены с продольными желобами, в которых размещены ролики 1
Недостатком такой крепи является то, что управление передвижением верхняков производится вручную машинистом комбайна. Это приводит к дополнительным непроизводительным затратам рабочего времени и в значительной мере усложняет управление работой комбайна с крепью, так как машинист в процессе работы должен постоянно контролировать величину вьодвижения штока гидродомкрата передвижения верхняков, следя за тем чтобы эта величина соответствовала ary установки постоянной крепи и передвижения комбайна.
Цель изобретения - повышение эффективности работы крепи путем автоматического управления передвижением
верхняков на заданную величину передвижения комбайна.
Поставленная цель достигается тем, что рама снабжена гидрораспределителем с плунжером и рукояткой управления, а верхняк - стойкой и кулачками, при этом стойка и один из кулачков жестко прикреплены к верхняку, а между ними с возможностью переме10щения посредством стержня с винтовой нарезкой установлен другой кулачок, причем рукоятка управления установлена с возможностью поочередного взаимодействия с кулачками.
15
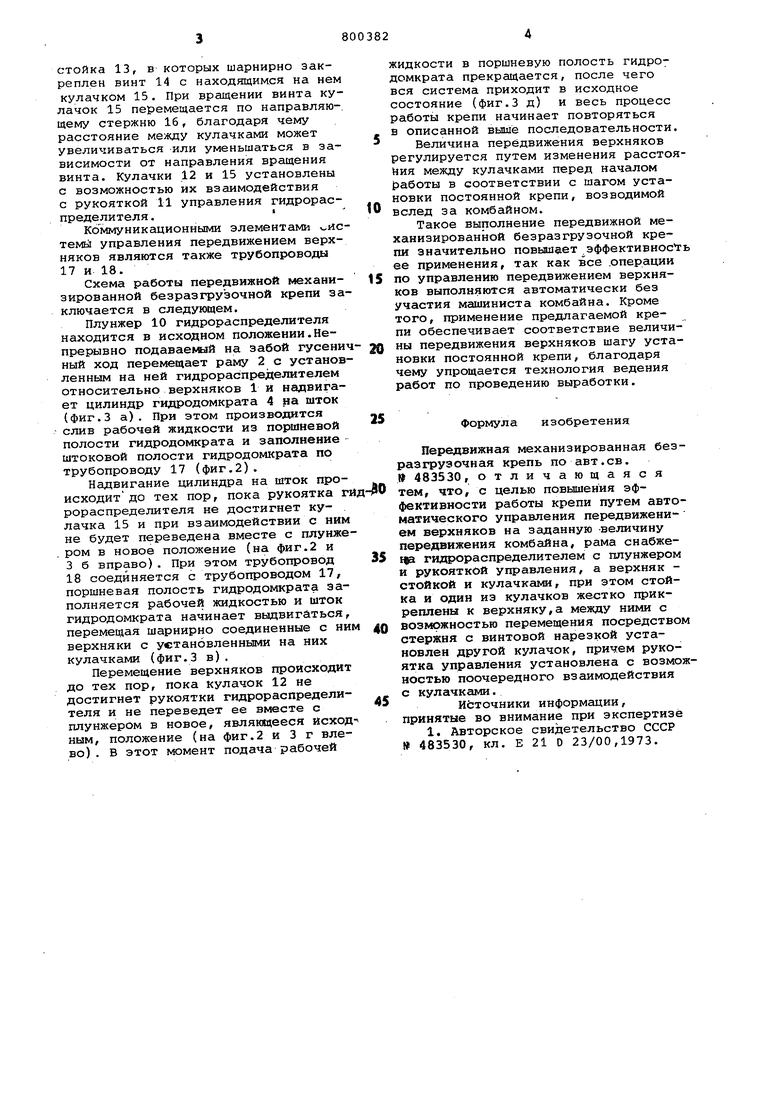
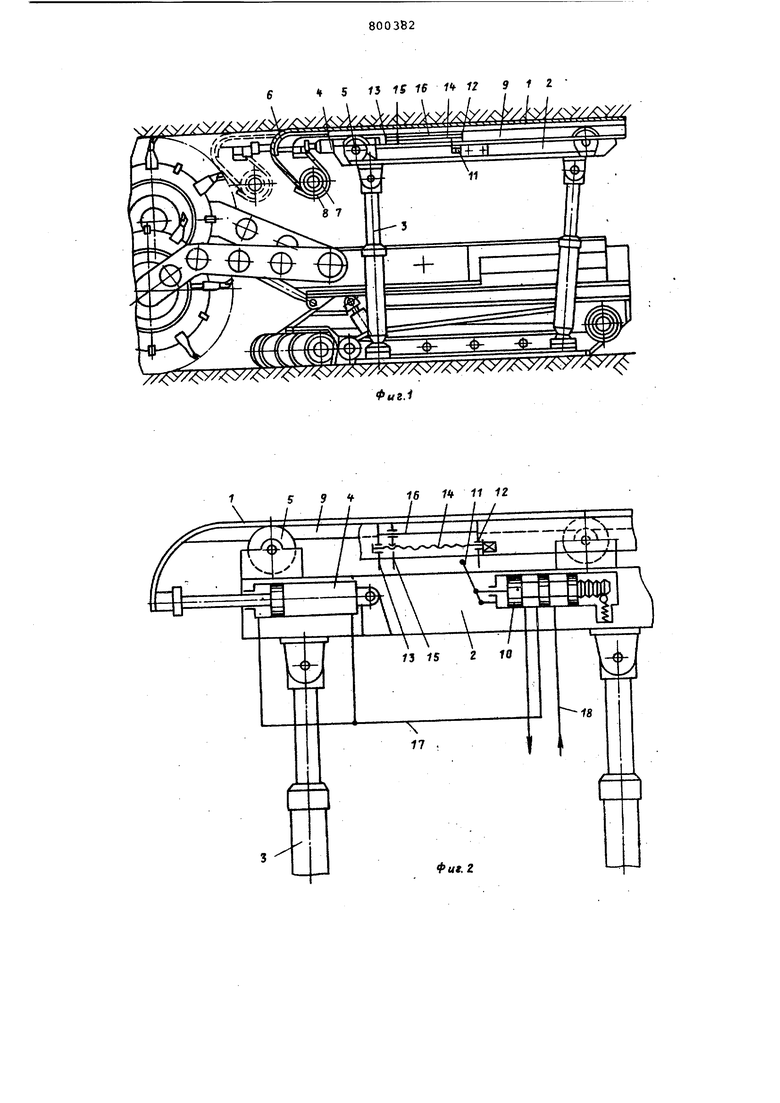
На фиг. 1 изображена крепь, общий вид сбоку; на фиг. 2 - схема управления передвижением верхняков; на фиг. 3 - схема работы крепи.
Крепь состоит из верхняков 1,ра20мы 2, гидростоек 3, устанавливаемых на раме гусеничного хода, гидродомкрата 4 передвижения верхняков, роликов 5, сетки б, помещенной, в рулоне 7 на лотке 8, продольных же25лобов 9, в которых размещены ролики. На раме крепи установлен гидрораспределитель, содержащий плунжер 10,/ шток которого шарнирно связан с рукояткой 11 управления. С верхня30ками жестко связаны кулачок 12 и стойка 13, в которых шарнирно закреплен винт 14 с находящимся на нем кулачком 15. При вращении винта кулачок 15 перемещается по направляющему стержню 16, благодаря чему расстояние между кулачками может увеличиваться или уменьшаться в зависимости от направления вращения винта. Кулачки 12 и 15 установлены с возможностью их взаимодействия с рукояткой 11 управления гидрораспределителя. Коммуникационными элементами темы управления передвижением верхняков являются также трубопроводы 17и 18. Схема работы передвижной механизированной безразгрузочной крепи за ключается в следующем. Плунжер 10 гидрораспределителя находится в исходном положении.Непрерывно подаваемый на забой гусени ный ход перемещает раму 2 с установ ленным на ней гидрораспределителем относительно верхняков 1 и надвигает цилиндр гидродомкрата 4 на шток (фиг.З а). При этом производится слив рабочей жидкости из поршневой полости гидродомкрата и заполнение штоковой полости гидродомкрата по трубопроводу 17 (фиг.2). Надвигание цилиндра на шток происходитдо тех пор, пока рукоятка г рораспределителя не достигнет ку- . лачка 15 и при взаимодействии с ним не будет переведена вместе с плунже ром в новое положение (на фиг.2 и 3 б вправо). При этом трубопровод 18соединяется с трубопроводом 17/ поршневая полость гидродомкрата заполняется рабочей жидкостью и шток гидродомкрата начинает вьщвигаться, перемещая шарнирно соединенные с ни верхняки с установленными на них кулачками (фиг.З в). Перемещение верхняков происходит до тех пор, пока кулачок 12 не достигнет рукоятки гидрораспределителя и не переведет ее вместе с плунжером в новое, являющееся ИсхоД ным, положение (на фиг.2 и 3 г влево) . В этот момент подача рабочей жидкости в поршневую полость гидродомкрата прекращается, после чего вся система приходит в исходное состояние (фиг.З д) и весь процесс работы крепи начинает повторяться в описанной выше последовательности. Величина передвижения верхняков регулируется путем изменения расстояйия между кулачками перед началом работы в соответствии с шагом установки постоянной крепи, возводимой вслед за комбайном. Такое выполнение передвижной механизированной безразгрузрчной крепи значительно повышает зффективнос гь ее применения, так как все .операции по управлению передвижением верхняков выполняются автоматически без участия машиниста комбайна. Кроме того, применение предлагаемой крепи обеспечивает соответствие величины передвижения верхняков шагу установки постоянной крепи, благодаря чему упрощается технология ведения работ по проведению выработки. Формула изобретения Передвижная механизированная безразгрузочная крепь по авт.св. 483530, отличающаяся тем, что, с целью повышения эффективности работы крепи путем автоматического управления передвижением верхняков на Зсщанную -величину передвижения комбайна, рама снабжена гидрораспределителем с плунжером и рукояткой управления, а верхняк стойкой и кулачками, при этом стойка и один из кулачков жестко прикреплены к верхняку,а между ними с возможностью перемещения посредством стержня с винтовой нарезкой установлен ДРУГОЙ кулачок, причем рукоятка управления установлена с возможностью поочередного взаимодействия с кулачками. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 483530, кл. Е 21 О 23/00,1973.
US 13 IS 16 lit П 9 1 i
)..
М
9 5 1Ъ 15 16 ft 12
Si
Ж
