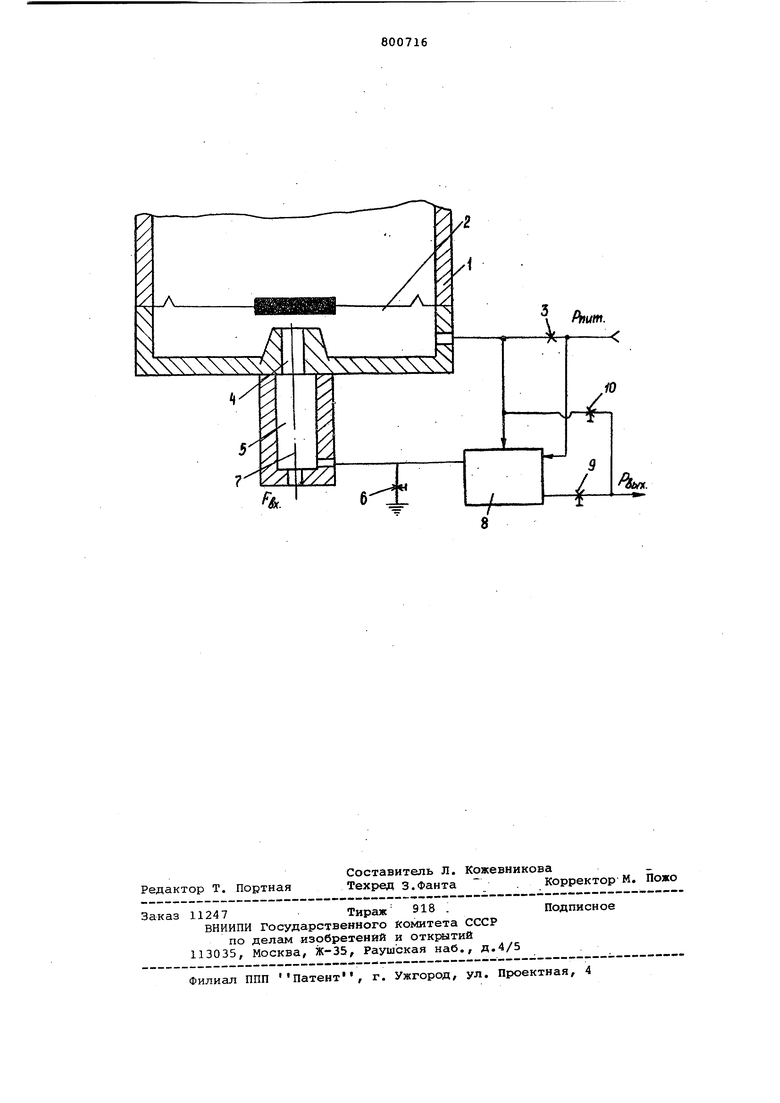
(54) ПРЕОБРАЗОВАТЕЛЬ СИЛОВОГО ВОЗДЕЙСТВИЯ В ПНЕВМАТИЧЕСКИЙ СИГНАЛ сопротивление 9 подключен к выходу сумматора, а через пневмосопротивление 10 к выходу проточной камеры 2 однсмембранного элемента 1. Преобрэ.зователь включается в рабо ту путем подачи давления питания. Струна 7 воспринимает входное уси ,лие Fgj(,, при этом мембрана прогибается и жесткий центр закрывает сопло ,что вызывает изменение давления в проточной камере 2. По принципу компенсации в проточной камере формируется давление сжатого воздуха, пропорциональное входному усилию. Проток воздуха, проходящий через сопло 4 и второй дроссель 6, создает в про точной камере 5 давление, зависящее от величины входного усилия. Изменяя проводимость дросселя б, изменяют ве личину этого давления и тем самым величину корректирующего воздействия поступающего на сумматор 8, что позволяет настраивать градуировочную ха рактеристику преобразователя. Выходной сигнал P-gblX через пневмосопротивление (дроссель) 10 подклю чен к выходному каналу проточной камеры 2 и через пневмосопротивление (дроссель) 9 к выходу сумматора 8. Такое выполнение позволяет смещать корректирующий сигнал камеры 5 в область текущего значения выходного сигнала, проточной камеры 2 и при под боре пневмосопротивлений 9 и 10 с коэффициентом проводимости (дроссели рования) близким к единице позволяе работать сумматору в области погрешности , которая обычно на два порядк меньше диапазона преобразования. Эт дает возможность значительно уменьшить погрешность коррекции ощибки, т.е. повысить точность преобразования. Снижение погрешности видно из следующего выражения БЫХ (Р±х)л к+(Р±х±ДР ±ДР,) . (1где F - входной сигнал; Р(F+X) - сигнал с проточной камеры 2; (FdtxirAP ±лр2) - сигнал сумматора 8; К - весовой коэффициент дросселирования пне мосопротивлений 9 и 10; X - погрешность сигнала Ч корректирующий сигнал дополнительной проточной камеры 5, который определяет не только погрешность сигнала Р, ее знак; ДР ошибка сумматора 8. Исходя из того, что сигнал ДР имеет противоположный знак сигналу х, выражение можно записать следующим образом РВЫХ. К+ (F-x+ДР ±Д Р) (1-К) . Учитывая тот факт, что величина ЛРд обычно на два порядка меньше BbtXi / величиной А Pg (1-К) можно пренебречь. Тогда получим Pg{,,)F-x+AP (1-К) . Подбирая проводимость дросселя б, чтобы X ДР/|(1-К) по абсолютной величине, получим Pgbfx. F т.е. ошибка сигнала в камере 2 будет скомпенсирована. Получим Pgbix Р±ДР2(), что точнее, чем в известном решении, где РВЫХ. F±uP2. .Технико-экономический эффект изобретения заключается в повыиении точности. Формула изобретения Преобразователь силового воздействия в пневматический сигнал по авт. св. № 580463, отличающийс я тем, что, с целью повышения точности преобразователя, он снабжен двумя пневмосопротивлениями, через одно из которых выходной канал преобразователя подключен к выходу сумматора, а через другое - к выходу проточной камеры одномембранного элемента. Источники информации, принятые во внимание при экспертизе ,1. Авторское свидетельство СССР № 580463, кл. G 01 L 1/02, 27.01.76.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический реверсивный привод запорного органа трубопроводной арматуры | 1979 |
|
SU863951A1 |
| Пневматическое устройство для формирования функции переключения | 1980 |
|
SU860085A1 |
| Суммирующее устройство | 1982 |
|
SU1188757A1 |
| Устройство для определения термической стойкости вещества | 1978 |
|
SU787747A1 |
| Преобразователь силового воздействияВ пНЕВМАТичЕСКий СигНАл | 1979 |
|
SU830157A2 |
| Преобразователь силового воздействия в пневматический сигнал | 1976 |
|
SU580463A1 |
| Преобразователь уровня | 1983 |
|
SU1129497A1 |
| Пневматический интегратор | 1982 |
|
SU1005004A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU622046A1 |
| Пневматический функциональный преобразователь | 1982 |
|
SU1113808A1 |