1
Изобретение относится к силоизмеритвльной технике.
По основному авт. св. 580463 известен преобразователь силового воздействия в пневматический сигнал, содержащий одномембранный элемент, проточная камера которого через лроссель подключена .к каналу питания, а жесткий центр соединен со струной, проходящей через сопло, дополнительную проточную камеру, второй дроссель и сумматор, причем дополнительная проточная камера установлена соосно струне и сообщена через второй дроссель с атмосферой и непосредственно с соплом одномембранного элемента и первым входом сумматора, второй вход которого подключен к проточной камере одномембранного элемента, а выход соединен с выходным каналом преобразователя l.
Недостатком известного преобразователя является то, что с его помощью определяют только текущее значение силового воздействия, а в системах пневмоавтоматики, где используют преобразователь силового воздействия, нередко требуется определить динамическое состояние этого силового воздействия.
Цель изобретения - расширение функциональных возможностей.
Указанная цель достигается тем, что в преобразователь введены два
пневмореле и пневмосопротивление, при этом выход сумматора через первое сопло пневмореле подключен к первому входу второго пневмореле и через пневмосопротивление ко второму входу второго пневмореле, а через
второе сопло первого пневмореле - ко второму входу второго пневмореле и через пневмосопротивление к первому входу второго пневмореле, каждое сопло которого подключено к соответствующему выходному кансшу. Такая конструкции преобразователя позволяет при появлении выходного сигнала в первом сопле второго пневмореле суДить о статическом состоянии (неизменном) входного усилия FBX. при появлении выходного сигнала Р2вых ° BTOpcavj сопле второго пневмореле - о динамическом состоянии Рру(т.е. о начале изменения Fg и времени его изменения) .
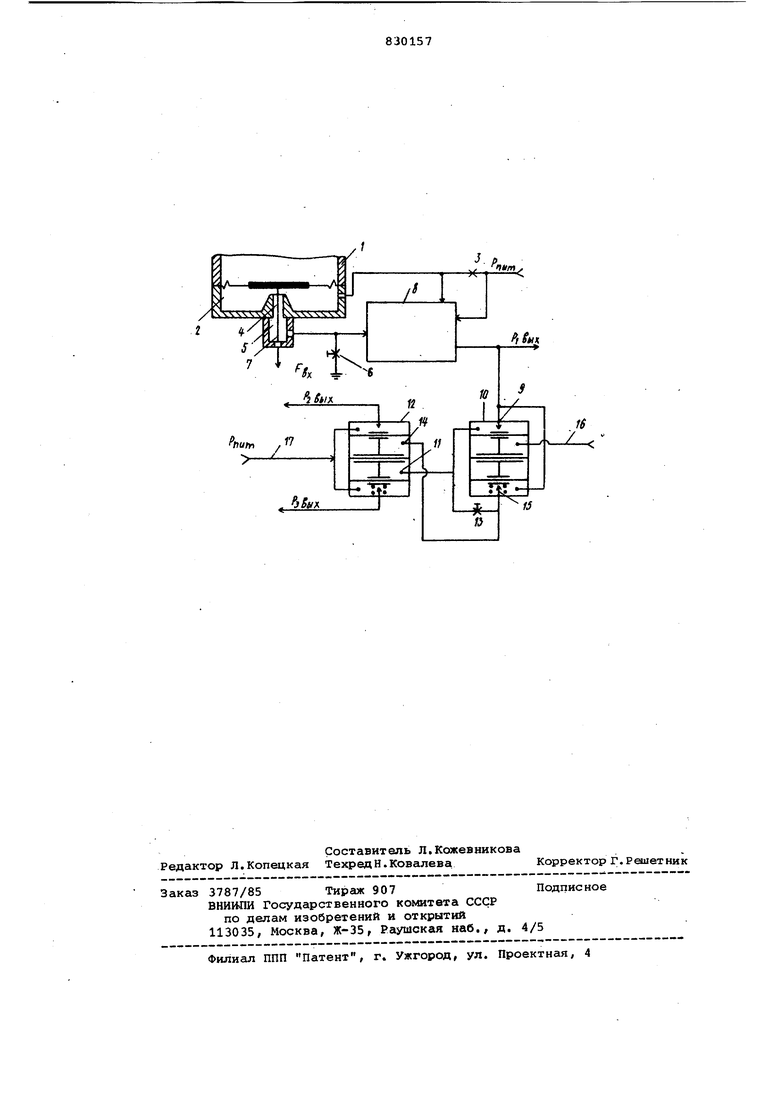
На чертеже приведена схема преобразователя силового воздействия в пневматический сигнал. Преобразователь содержит одномембранный элемент 1 с проточной камерой 2, которая через дроссель 3 подключена к каналу питания Ррупч через-сопло 4 соединена с дополнител ной проточной камерой 5, которая через второй дроссель б связана с атмосферой. Жесткий центр мембраны сое сцинен со струной 7, проходящей через сопло 4, причем дополнительная проточная камера 5 установлена соосно струне 7 и связана непосредственно с первым входом суматора 8, второй вход которого подключен к проточной камере 2 одномембранного элемента 1 а выходной сигнал Рх)вых. сумматора 8. одновременно.через сопло 9 пневморал 10 подключен к первому входу 11 второго, пневмореле 12, а через пневмосопротивление 13 ко второму входу 14 пневмореле 12. Кроме того, выходной сигнал сумматора 8 через сопло 15 пневмореле 10 подключен непосредственно ко второму входу .14 вт рого пневмореле 12 и через то же пневмооопротивление 13 к первому входу 11 второго пневмореле 12. Вход 16 пневмореле 10 подключают в случае, если увеличивается входное усилие FBX и отключают, если умень шается. Сигнал Р2вых одном из сопел пневмореле 12 появляется тогда, когца начинает изменяться Fg, т.е. он характеризует динамическое состояние входного силового воздействия Fgx. Сигнал Р появляется, когда не изменяется, т.е. он характеризует статическое состояние Fgy, . )(XapaK теризует текущее значение Fp, , Сигналы Р28ыч Р вых ---У- использованы для управления в системах пневмоавтоматики, поэтому на пневмореле 12 подводится канал 17 РПИТПреобразователь включается в работу путем подачи давления питания Р,.. Струна 7 воспринимает входное усилие . Вход сумматора 8 пропорционален Fg . Если Fg не изменяется,то не изменяется и сигнал ,i-)«,a это значит, что , проходя через сопло 9 или 15, реле, 10 и дрос сель 3, приведет к равенству сигналов на входах 11 и 14 реле, 1,2 в кот ром под действием пружины закрыто сопло выхода открыто сопло выхо да которое свидетельствует о том, что Fg не изменяется у при этом сигнал на вход 16 пневмореле 10 может поступать или быть отключен. Если FBX начинает увеличиваться, то начинает увеличиваться на вход 16 пневмореле 10 сигнал не поступает. Под действием пружины пневмореле 10, закрыто соплом 9. Сигнал Р,увеличивающийся во времени, через сопло 15 пневмореле 10 непосред с,твенно поступает на вход 14 пневмореле 12 и увеличивается с той же скоростью, что и ,,y. Одновременно игнал через пнёвмосопротивление 3поступает на вход 11, что вызыват увеличение сигнала на входе 11 с еньшей скоростью. За счет разницы авлений на входах 14 и 11 мембраный блок перемещается вниз, закрыват сопло канала Р58мхИ открывает сопо POBUWI TO свидетельствует о динами-iOPlA./ V еском состоянии (об изменении) Fp. сли подается команда на уменьшение Fg, то одновременно появляется сигнал на входе 16 пневмореле 10, под ействием которого мембранный блок перемещается вниз, закрывает сопло 15 и открывает сопло 9, что приводит к равенству сигналов на входе 11 и 14пневмореле 12, под действием пру жины которого мембранный блок перемещается вверх, закрывает сопло выхода открывает сопло что свидетельствует о прекращении изменения FBX . Если такая команда не поступает,а F0x перестает увеличиваться, то -перестает увеличиваться и нвых Через некоторое время за счет пневмосопротивления 13 сиг1 алы на входах 11 и 14 сравняются, и под действием пружины выход РЗВЫЧ ключается и включается говорит о статическом состоянии Fg. Если подается команда на уменьшение FBK , то появляется сигнал на входе 16 реле 10. Сопло 15 закрывается, а сопло 9 открывается. Равенство сигналов на входах 11 и 14 не меняется. При уменьшении Fg) уменьшается который через -сопло 9 непосредственно уменьшает сигнал на входе 11 и через пнёвмосопротивление 13 на входе 14, вследствие чего на входе 14 Формируется повышенное давление, которое перемещает мембранный блок реле 12 вниз, закрывает сопло Pjetix ° крывает сопло / о характера- , зует динамическое состояние Fg, . Формула изобретения Преобразователь силового воздействия в пневматический сигнал по авт. св. № 580463, отличающийся тем, что, с целью расширения функциональных возможностей, в него введены два пневмореле и пнёвмосопротивление, при этом выход сумматора через первое сопло первого пневмореле подключен к первому, входу второго пневмореле и через пнёвмосопротивление i ко второму входу второго пневмореле, а через второе сопло первого пневмореле - ко второму входу второго пневмореле и через пнёвмосопротивление к первому входу второго пневмореле, каждое сопло которого подключено к соответствукацему выходному каналу. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 580463, кл. G 01 L 1/02, 27.01.76.
Л
nitm 
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический реверсивный привод запорного органа трубопроводной арматуры | 1979 |
|
SU863951A1 |
| Преобразователь силового воздействияВ пНЕВМАТичЕСКий СигНАл | 1979 |
|
SU800716A2 |
| Преобразователь силового воздействия в пневматический сигнал | 1976 |
|
SU580463A1 |
| ГЕНЕРАТОР ИМПУЛЬСОВ | 1992 |
|
RU2032840C1 |
| Установка для определения термической стойкости веществ | 1985 |
|
SU1293566A1 |
| Устройство для определения термической стойкости вещества | 1978 |
|
SU787747A1 |
| Вакуумное реле | 1983 |
|
SU1232969A1 |
| ГЕНЕРАТОР ИМПУЛЬСОВ | 1992 |
|
RU2010110C1 |
| ПНЕВМАТИЧЕСКИЙ ЗАДАТЧИК | 1992 |
|
RU2032933C1 |
| Суммирующее устройство | 1982 |
|
SU1188757A1 |