Изобретение относится к иэмерительной технике и может быть использовано в балансировочной технике при балансировке вращающихся тел с применением метода ядерного гаммарезонансного излучения, в основе которого лежит эффект Мессбауэра. Известно устройство для определения смещения центра тяжести вращающегося тела при его балансировке на подвижных опорах, содержащее источник излучения в виде пьезоэлектрического датчика, взаимодействующего с вращающимся телом/ блоки преобразования сигнала датчика и схему выделения сигнала неуравновешенности И . За счет того,что источник излуче ния является точечным, устройство позволяет измерить отклонение только в одной точке, что является недостаточным при осуществлении балансировки вращающегося тела, а следовательно, снижает точность балансировки. Наиболее близкое к предлагаемому устройство для определения смещения центра тяжести вращающегося тела при его балансировке на подвижных опорах содержит корпус, размещенные в нем подвижные опоры для установки тела. стакан с радиоактивным источником гамма-излучения нанесенным на его внутреннюю поверхность, приемник излучения, соосно расположенный в стакане, и л оллиматор, выполненный в виде полого цилиндра с радиальным отверстием t23 . Недостатком устройства является расположение источника излучения на подвижной опоре, что приводит к появлению дополнительного спектра скоростей и,., соответственно, уменьшению полезного сигнала из-за колебания опоры, например от приводного двигателя. Механическое воздействие на источник излучения может привести к попаданию его в окружаквдее прострай-ство за счет распыления ит.д. Такое расположение .источника излучения снижает точность балансировки. Цель изобретения - повышение точности. Указанная цель достигается тем, что устройство снабжено резонансным поглотителем, установленным в отверстии вращающегося коллиматора,жестко связанного с балансируемым телом, а стакан и приемник излучения жестко закреплены на корпусе устройства.
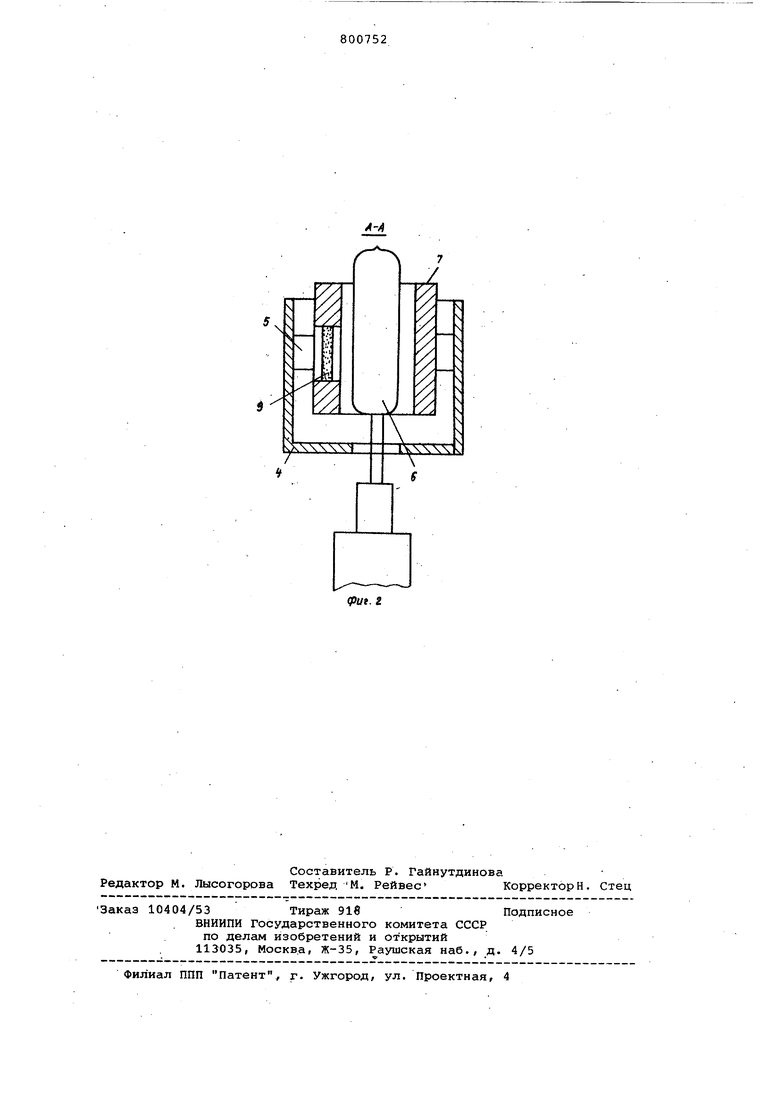
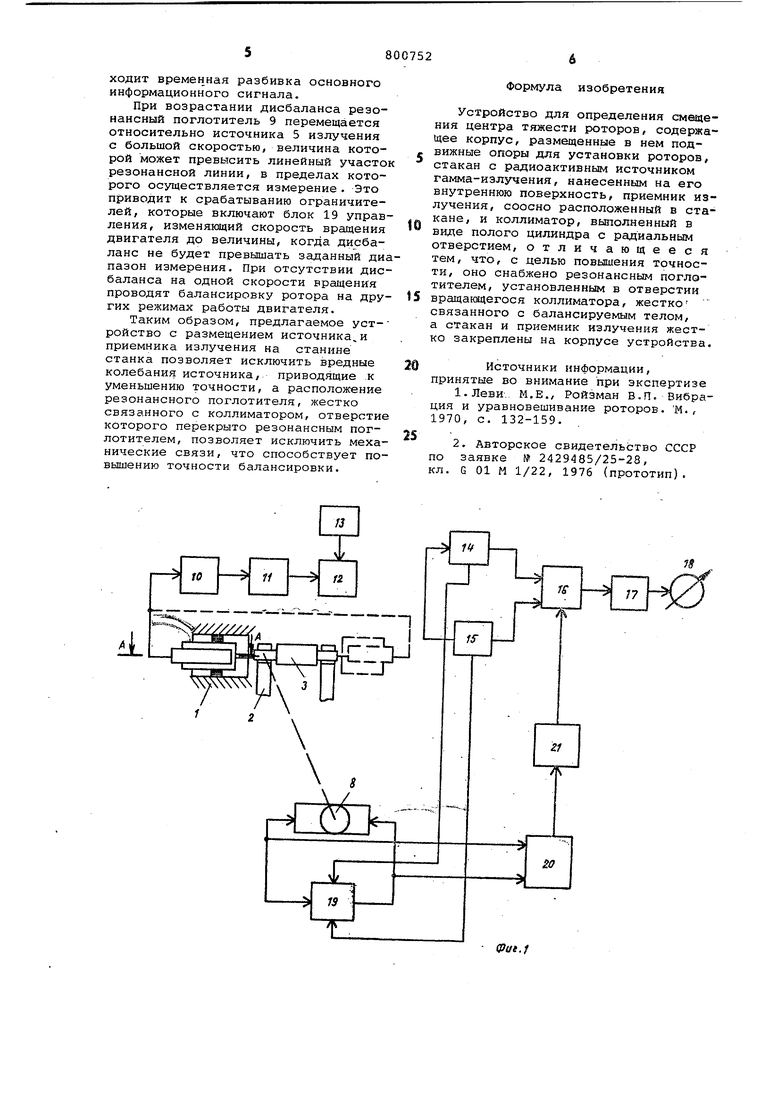
На фиг. 1 изображено устройство для определения смещения центра тяжести вращающегося тела на фиг,2 сечение А-А на фиг. 1.
Устройство содержит корпус 1,размещенные в нем подвижные опоры 2 для установки роторов 3, стакан 4, радиоактивный источник 5 гамма-излучения, который в виде узкого кольца нанесен на внутреннюю поверхность стакана 4, приемник б излучения,соосно расположенный в стакане 4 и также, как стакан 4, жестко закрепленный на корпусе 1 устройства, коллиматор 7, выполненный в виде полого цилиндра с радиальным отверстием, жестко связанного с приводом 8 стакана (не показан), резонансный поглотитель 9, установленный в отверстии коллиматора 7. Приемник б излучения соединен со схемой выделения сигнала неуравновешенности, которая включает последовательно соединенные усилитель 10, нормализатор 11. импульса по амплитуде и длительности и блок 12 компенсации, вход которого соединен с генератором 13 опорного напряжения. Выход блока 12 компенсации соединен с входами дискриминаторов-ограничителей 14 и 15 верхнего и нижнего уровня резонансной линии, первые выходы которых соединены с интегратором 16, соединенным с блоком 17 обработки и преобразования информации, выход которого соединен с индикатором 18 дисбаланса.
Привод В соединен с двумя выходами блока 19 управления, которые соединены также с выходами генератора 20 синхронизирующих меток, два выхода которого соединены с вторыми выходами дискриминаторов-ограничителей 14 и 15,между генератором 20 меток и интегратором 16 расположен блок 21 синхронизации.
Устройство работает следующим образом.
Балансируемый ротор приводится во вращение приводом 8, а коллиматор 7 вращается с заранее выбранной скоростью, например, через редуктор.При вращении коллиматора 7 через отверстие с каждого участка источника 5 излучение проходит через резонансный поглотитель 9 на приемник 6 излучения. Если ротор 3 сбалансирован, то коллиматор 7 вращаясь не испытывает дополнительного перемещения в направлении источника и приемника излучения. При этом на- выходе приемника 6 излучения будет сигнал постоянный при повороте коллиматора на полный оборот. Если ротор 3 не полностью сбалансирован, то резонансный поглотитель 9 при вращении будет испытывать дополнительное перемещение относительно источника (приемника),излучения, так как опора 2 с ротором 3 будет в таких условиях перемещаться и,соответственно, сигнал на выходе приемника 6 изменится при повороте ротора 3 на полный оборот.Изменение сигнала связано пропорционально со скоростью движения резонансного поглотителя 9 относительно источника 5 излучения, излученные гаммакванты с которого регистрируются приемником б излучения. С выхода приемника б импульсы поступают на усилитель 10, где они усиливаются до определенной амплитуды с последующей нормализацией импульсов по амплитуде и длительности в нормализаторе 11, позволяющем осуществить стандартизацию импульсов, которая облегчит дальнейшую обработку и преобразование информации.
Учитывая симметричность резонанс ной,линии относительно вертикальной оси, необходимо режим работы выбирать на одном из склонов резонансной линии для увеличения чувствительности и возможности определения направления отклонения центра тяжести тела вращения. В этом случае при отсутствии движения резонансного поглотителя в направлении источника излучения приемник raiviMa-квантов регистрирует некоторое количество излучения, пропорциональное рабочей точке на полуширине резонансной линии. Для компенсации этого сигнала служит блок
12компенсации, на второй вход которого поступает сигнал от генератора
13опорного напряжения. Дискриминаторы-ограничители 14 и 15 управляются сигналами блока 12 сравнения,срабатывают при достижении заданного уровня сигнала на их входах, и определяя таким образом диапазон излучения в пределах линейного участка одного из склонов резонансной линии. Выбранный уровень срабатывания ограничителей определяет точность измерения, так как расширение их диапазона срабатывания приводит к режиму работы на нелинейных участках резонансной линии. Выход дискриминаторов-ограничителей связан со входом интег.ратора 16, где осуществляется преобразование сигнала для определения амплитуды смещения центра тяжести балансируемого ротора. Выход интегратора 16 связан со входом индикатора 18 дисбаланса, на второй вход которого поступают синхронизирующие импульсы для определения направления смещения центра тяжести ротора 3.
В канал синхронизации входит генератор 20 синхронизирующих меток, блок 21 синхронизации и блок 19 управления. Частота синхронизирующих меток определяется углом поворота приводного двигателя и после прохождения меток блока синхронизации 21, служащего для выбора масштаба, поступает в конечный каскад, где происходит временная разбивка основного информационного сигнала.
При возрастании дисбаланса резонансный поглотитель 9 перемещается относительно источника 5 излучения с большой скоростью, величина которой может превысить линейный участок резонансной линии, в пределах которого осуществляется измерение . Это приводит к срабатыванию ограничителей, которые включают блок 19 управления, изменяющий скорость вращения двигателя до величины, когда дисбаланс не будет превышать заданный диапазон измерения. При отсутствии дисбаланса на одной скорости вращения проводят балансировку ротора на других режимах работы двигателя.
Таким образом, предлагаемое устройство с размещением источниками приемника излучения на станине станка позволяет исключить вредные колебания источника, приводящие к уменьшению точности, а расположение резонансного поглотителя, жестко связанного с коллиматором, отверстие которого перекрыто резонансным поглотителем, позволяет исключить механические связи, что способствует поВЕЛшению точности балансировки.
Формула изобретения
Устройство для определения смещения центра тяжести роторов, содержа1цее корпус, размещенные в нем подвижные опоры для установки роторов, стакан с радиоактивным источником гамма-излучения, нанесенным на его внутреннюю поверхность, приемник излучения, соосно расположенный в стакане, и коллиматор, вьтолненный в виде полого цилиндра с радиальным отверстием, отличающееся тем, что, с целью повышения точности, оно снабжено резонансным поглотителем, установленным в отверстии вращающегося коллиматора, жестко связанного с балансируемым телом, а стакан и приемник излучения жестко закреплены на корпусе устройства,
Источники информации,
принятые во внимание при экспертизе 1.Леви. М.Е., Ройзман В.П. Вибрация и уравновешивание роторов. М., 1970, с. 132-159.
2. Авторское свидетельство СССР
по заявке № 2429485/25-28,
кл. G 01 М 1/22, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный акселерометр | 1974 |
|
SU499532A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕКТОРА ДИСБАЛАНСА ВРАЩАЮЩЕГОСЯ ТЕЛА | 2006 |
|
RU2344393C2 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВЕКТОРА ДИСБАЛАНСА | 1991 |
|
RU2016384C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| Балансировочный станок | 1983 |
|
SU1144015A1 |
| Балансировочный станок | 1983 |
|
SU1155886A1 |
| Способ балансировки роторов и устройство для его осуществления | 1980 |
|
SU943546A1 |