Настоящее изобретение относится к технике балансировки вращающихся тел и может быть использовано для определения и коррекции дисбаланса роторов дискообразной формы с соотношением длины к диаметру меньше 0,2-0,25.
Способ балансировки роторов дискообразной формы, масса которых приблизительно размещена в одной плоскости, предусматривает измерение параметров неуравновешенности (величина неуравновешенной массы, радиус и угол расположения ее центра относительно оси ротора) путем определения вектора дисбаланса (дисбаланс - векторная величина, равная произведению неуравновешенной массы на радиус-вектор ее центра относительно оси) и приведение центра массы ротора на ось вращения с помощью корректирующей массы, устанавливаемой в одной плоскости, перпендикулярной оси ротора. Эту плоскость называют плоскостью приведения неуравновешенности или плоскостью коррекции (см., например, М.Е.Левит, В.М.Рыженков. Балансировка деталей и узлов. М., Машиностроение, 1986 г.).
Широко известны способы балансировки ротора, основанные на сообщении ротору вращательного движения и измерении амплитуд и фаз его колебаний в плоскостях, перпендикулярных оси ротора (например, пат. ЕР №0150274, 1985 г.). Плоскости коррекции в соответствии с этим способом фиксируют опорами, в которых устанавливают ротор, а измеренные амплитуды и фазы колебаний ротора осуществляют измерением динамических нагрузок, возникающих в опорах. Недостаток способа связан с необходимостью дополнительной обработки информации о параметрах неуравновешенности в разных плоскостях коррекции.
Известен способ автоматической балансировки ротора при его вращении, реализуемый в устройстве для автоматической балансировки (пат. RU №2241969 С1, кл. G01M 1/38, 2004 г.), который предполагает применение для автоматической балансировки ротора заполненной жидкостью упругой балансировочной камеры, концентрично надетой на ротор, втулки из упругого крупнопористого материала, поры которого заполнены жидкостью с изменяющейся во времени вязкостью от текучего состояния до полного затвердевания. Применение способа затруднено низкой производительностью и ограничено определенной номенклатурой балансируемых роторов.
Общим недостатком способов, основанных на сообщении ротору вращательного движения при установке его в опорах, является сложность реализации автоматической балансировки при совмещении во времени операций определения и устранения неуравновешенности, а также влияние используемых технических средств на результаты измерений из-за вибраций, обусловленных вращением ротора и связанных с биением посадочных поверхностей муфт, овальностью цапф, перекосом наружных колец подшипников качения, наличием смазочного материала в опорах трения скольжения, погрешностями изготовления подшипников качения - волнистостью дорожек качения, гранностью тел качения, дисбалансами сепаратора, аэродинамическими, гидродинамическими и электромагнитными силами.
Настоящее изобретение относится к принципиально иному способу балансировки, характеризующемуся колебательным движением ротора, при котором возможно совмещение во времени операций определения и устранения неуравновешенности, и который позволяет, используя достаточно простые технические средства, повысить точность балансировки.
Этот способ, реализованный в устройстве для автоматической балансировки деталей вращения, известен по а.с. СССР №289325, кл. G01M 1/38, 1970 г. В соответствии с этим способом ротору, установленному на упругой опоре, сообщают угловое колебательное движение вокруг оси вращения, измеряют его угловое колебательное движение вокруг центра упругой опоры относительно вертикальной оси и устраняют неуравновешенность в процессе движения детали путем ввода в ее технологическое углубление корректирующей массы. Достоинством способа является возможность при ограниченной амплитуде угловых колебаний осуществлять введение корректирующей массы в заранее предусмотренные технологические углубления непосредственно в процессе движения.
Известен способ балансировки деталей вращения (а.с. СССР №289325, кл. G01M 1/16, 1971 г.), заключающийся в том, что уравновешиваемой детали сообщают круговое колебательное движение в плоскости, перпендикулярной ее оси вращения, и измеряют возникающие угловые колебания детали относительно этой оси, по амплитуде и фазе которых судят о величине и угловой координате неуравновешенности.
В указанном изобретении уравновешиваемой детали сообщают круговое колебательное движение, в результате которого на ось вращения детали постоянно действует центростремительная сила, вектор которой непрерывно вращается в плоскости кругового колебательного движения. Центростремительная сила пропорциональна массе уравновешиваемой детали, квадрату частоты вращения и радиусу круговой орбиты ее центра массы и составляет, например, для детали массой 3 кг, при частоте кругового движения 62,8 рад/с и радиусе орбиты 2 мм, величину, равную 23,6 Н. Под действием этой силы ось вращения уравновешиваемой детали непрерывно смещается относительно системы отсчета, что приводит к значительным погрешностям определения дисбаланса.
Аналогом настоящего изобретения является также способ по патенту России №2270985 С1, кл. G01M 1/16, 2006 г., направленный на повышение точности измерений амплитуды и фазы угловых колебаний ротора и включающий сообщение ротору и соосному ему уравновешенному телу колебательного движения относительно неподвижной точки на общей оси ротора и уравновешенного тела и измерение амплитуды и фазы угловых колебаний ротора, по которым судят о параметрах неуравновешенности ротора, и заключающийся в том, что одновременно, в каждый момент времени в плоскости, проходящей через неподвижную точку, к уравновешенному телу по касательным прикладывают силы, противодействующие угловым колебаниям тела относительно оси, а в качестве упомянутой неподвижной точки используют точку пересечения оси ротора с одной из плоскостей приведения неуравновешенности ротора, а измеренные амплитуду и фазу угловых колебаний используют для определения параметров неуравновешенности в другой плоскости приведения неуравновешенности. Этот способ является прототипом настоящего изобретения.
Общим недостатком данных изобретений является ограничение допустимой амплитуды колебательного движения и, как следствие, снижение чувствительности измерения неуравновешенности. Ограничение амплитуды задаваемых колебаний связано с возникновением при движении балансируемого и уравновешенного тел динамических возмущающих сил, действующих на станину и вызывающих ее колебания с частотой движения. Эти колебания непосредственно передаются балансируемому и уравновешенному телам, что приводит к появлению значительных погрешностей измерения.
Достигаемым техническим результатом при использовании настоящего изобретения является повышение точности балансировки за счет снижения (в идеальном случае за счет исключения) динамических возмущающих сил, действующих на станину.
В соответствии с настоящим изобретением способ балансировки роторов, состоящий в сообщении кругового движения балансируемому ротору и уравновешенному телу в плоскости, перпендикулярной их общей оси, расположенным с возможностью относительного углового смещения, измерении амплитуды и фазы возникающих угловых колебаний балансируемого ротора относительно уравновешенного тела и определении по результатам измерений величины неуравновешенности и угловой координаты ее расположения, дополняют новой операцией, а именно в плоскости кругового движения центра общей массы балансируемого ротора и уравновешенного тела к их общей оси в каждый момент времени прикладывают силу, равную по величине, но противоположную по направлению центростремительной силе общей массы балансируемого и уравновешенного тел. Это приводит к значительному уменьшению (в идеальном случае исключению) динамических возмущающих сил, действующих на станину, исключению ее дестабилизирующего воздействия на балансируемый ротор и уравновешенное тело, что в конечном итоге приводит к уменьшению погрешностей измерения.
Аналогом устройства, с помощью которого реализуется заявляемый способ, является устройство, известное по а.с. СССР №396575, кл. G01M /1/06, 1973 г. и предназначенное для способа балансировки, основанного на сообщении балансируемой детали кругового колебательного движения в плоскости, перпендикулярной ее оси. Устройство содержит станину, вертикальный вал, установленный в подшипниках плаформы-подвеса, подвешенной к станине на упругих элементах, и предназначенный для закрепления балансируемой детали, и привод круговой вибрации, выполненный в виде двух расположенных на станине, один относительно другого, под углом 90 градусов электромагнитных вибраторов, подключенных к источнику двухфазного напряжения, например трехфазно-двухфазному трансформатору.
Недостатком этого устройства является невысокая точность балансировки из-за действия приложенных к станине динамических сил, возникающих при работе электромагнитных вибраторов и вызываемых при этом ее неинформативных колебаний. Величина модуля вектора равнодействующей динамических сил электромагнитных вибраторов пропорциональна массе станины, квадрату частоты колебаний и амплитуде ее колебаний и составляет, например, для станины массой 30 кг, при частоте и амплитуде колебаний 62,8 рад/с и 0,2 мм соответственно, величину, равную 23,6 Н. При этом вектор силы, приложенный к станине, постоянно меняет свое направление с частотой напряжения питания электромагнитных вибраторов. Под действием этой силы, приложенной со стороны станины к упругим элементам, ось вращения уравновешиваемой детали непрерывно смещается относительно системы отсчета, что приводит к значительным погрешностям определения дисбаланса.
Прототипом устройства, с помощью которого реализуется заявляемый способ, является устройство, известное по патенту России №2105962, кл. G01М 1/38, 1993 г. и предназначенное для способа балансировки, основанного на сообщении ротору кругового колебательного движения. Устройство содержит станину, закрепленный на роторе вал, установленный соосно внутри уравновешенного тела на упругих опорах с возможностью его углового смещения вокруг общей оси относительно уравновешенного тела, снабженного на одном конце сферической опорой и связанного регулируемым эксцентриком с валом привода вращательного движения, а также датчики измерения неуравновешенности, датчик опорного сигнала, блок обработки сигналов датчиков и блок измерения и индикации величины и угловой координаты неуравновешенности. Перечисленные датчики и блоки соединены между собой по схеме, обеспечивающей измерение параметров неуравновешенности.
Общими недостатками этих устройств, также как и известного способа, является недостаточно высокая точность балансировки из-за неинформативных колебаний вала с балансируемой деталью в горизонтальной плоскости, обусловленных действием динамических сил, приложенных к упругому элементу подвеса от колеблющейся станины, а также от действия на станину сил реакции привода, возникающих при контакте непрерывно вращающегося вала привода с регулируемым эксцентриком.
Техническим результатом, получаемым при применении заявляемого устройства, является повышенная точность балансировки, достигаемая использованием более простых технических средств, не вызывающих неинформативных колебаний вала с балансируемой деталью в горизонтальной плоскости.
Для реализации способа в устройстве для балансировки роторов, содержащем станину, уравновешенную платформу, подвешенную на станине на упругих элементах, вертикальный вал с соосно закрепленным на одном конце балансируемом роторе, установленный другим концом в упругих опорах в центре уравновешенной платформы, перпендикулярно ее плоскости с возможностью его угловых колебаний, привод кругового движения и блок измерения, включающий датчики измерения неуравновешенности, датчик опорного сигнала, блок обработки сигналов датчиков, соединенный своими входами с выходами датчиков измерения неуравновешенности и опорного сигнала, блок измерения и индикации величины и угловой координаты неуравновешенности, соединенный своим входом с выходом блока обработки сигналов датчиков, упругие элементы в количестве не менее трех выполнены одинаковыми, установлены вертикально и жестко закреплены одними концами на уравновешенной платформе в точках, равноудаленных относительно друг друга и от ее центра, а другими концами жестко закреплены на станине в точках, лежащих в одной горизонтальной плоскости, а привод кругового движения выполнен в виде электродвигателя, установленного на уравновешенной платформе в ее центре так, что ось вала электродвигателя перпендикулярна плоскости платформы, на валу электродвигателя закреплена инерционная масса с заданным эксцентриситетом, центр которой расположен в горизонтальной плоскости, проходящей через центр общей массы уравновешенной платформы с установленными на ней приводом кругового движения, валом с балансируемым ротором, упругими опорами и датчиками неуравновешенности и опорного сигнала.
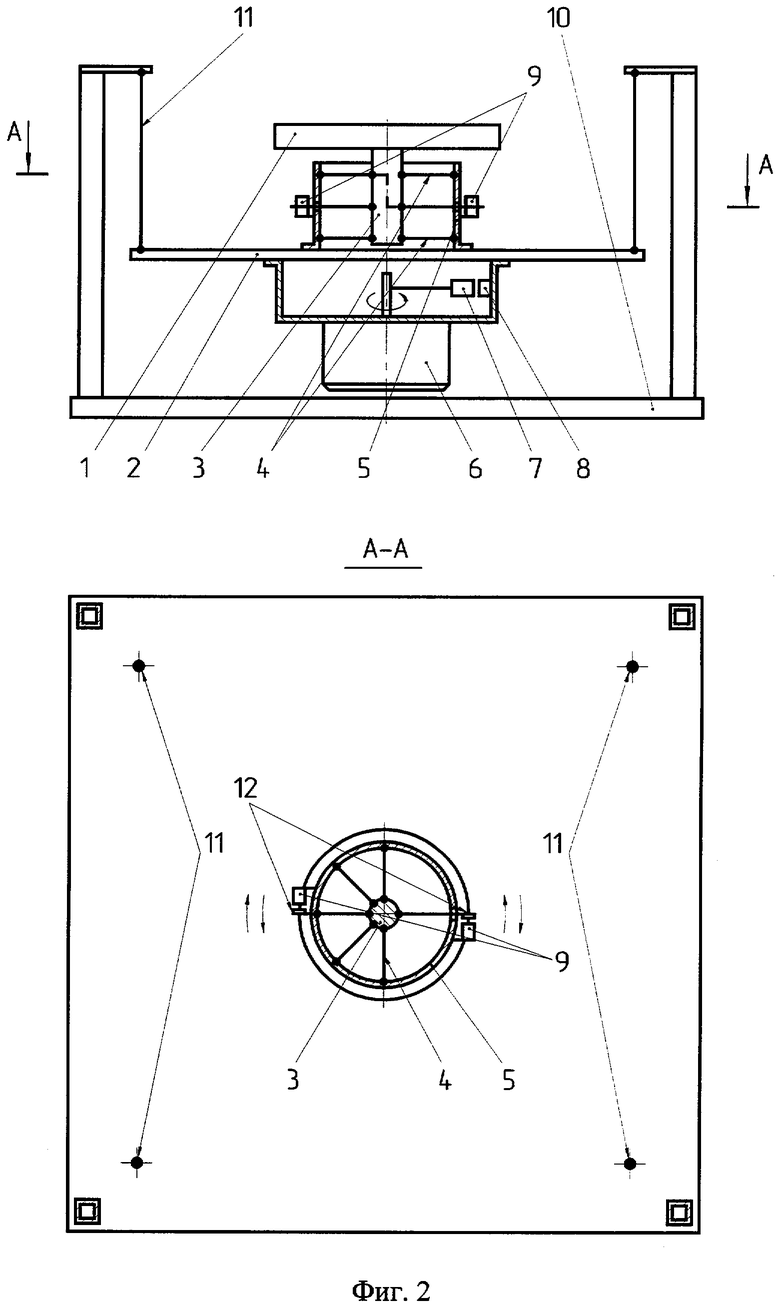
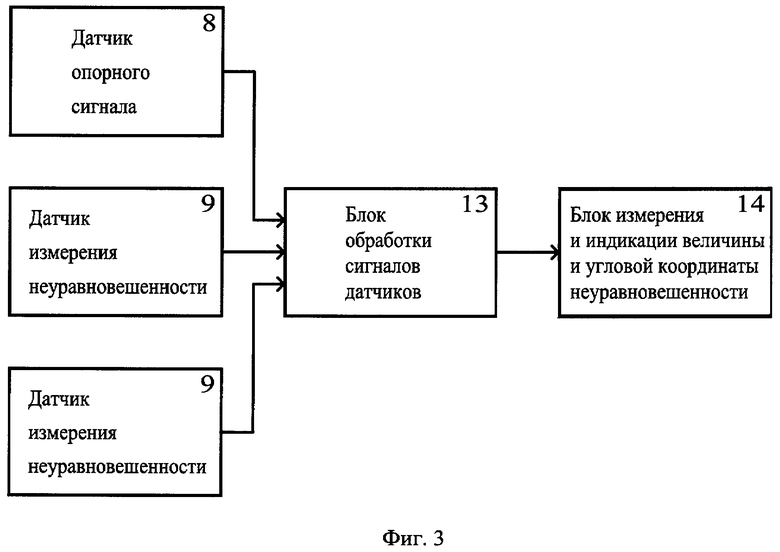
Предлагаемый способ поясняется чертежом, представленным на фиг.1. На фиг.2 схематично изображено устройство, с помощью которого реализуется способ, на фиг.3 представлена блок-схема устройства измерения и индикации величины угловой координаты неуравновешенности.
Балансируемому ротору (фиг.1), например диску 1, установленному на одной оси с уравновешенным телом 2 с возможностью их относительного углового смещения φ, сообщают круговое колебательное движение, при котором их общий центр массы О совершает движение по круговой траектории радиусом r и частотой ω в плоскости Р-Р, перпендикулярной их общей оси с центром движения О'. На фиг.1 х, у, х', у' - оси системы координат в плоскости Р-Р с центрами в точках О и О'; m, R, α - масса, радиус и угловая координата расположения неуравновешенности балансируемого ротора 1.
При таком движении на общую ось балансируемого ротора 1 и уравновешенного тела действует центростремительная сила Fц, вектор которой непрерывно вращается вокруг точки О, что приводит к динамическим возмущающим силам, действующим на систему отсчета. Для компенсации центростремительной силы согласно предложенному изобретению к их общей оси в плоскости Р-Р в каждый момент времени приложена сила Fк, равная по величине, но противоположная по направлению Fц - центростремительной силе общей массы балансируемого ротора 1 и уравновешенного тела 2, что исключает динамические возмущающие силы, действующие на систему отсчета. При наличии неуравновешенности ротор 1 совершает угловые колебания относительно уравновешенного тела 2, амплитуда φ и фаза которых однозначно определяют величину и угловую координату расположения его неуравновешенности.
Устройство для балансировки роторов (фиг.2) содержит станину 10, уравновешенную платформу 2, подвешенную на станине 10 на упругих элементах 11, вертикальный вал 3, с соосно закрепленным на одном конце балансируемым ротором 1, установленным другим концом в упругих опорах 4 с помощью цилиндрической обоймы 5 в центре уравновешенной платформы 2, перпендикулярно ее плоскости с возможностью его угловых колебаний, привод кругового движения, выполненный в виде электродвигателя 6, установленного на уравновешенной платформе 2 в ее центре так, что ось вала электродвигателя 6 перпендикулярна ее плоскости, на валу электродвигателя 6 эксцентрично закреплена инерционная масса 7, центр которой расположен в плоскости, параллельной плоскости платформы 2, проходящей через центр общей массы уравновешенной платформы 2 с установленными на ней электродвигателем 6, инерционной массы 7, обоймой 5, упругими опорами 4, валом 3, балансируемым ротором 1 и другими конструктивными элементами. Упругие элементы 11 в количестве не менее трех выполнены одинаковыми, установлены вертикально и жестко закреплены одними концами на уравновешенной платформе 2 в точках, равноудаленных относительно друг друга и от ее центра, а другими жестко закреплены на станине 10 в точках, лежащих в одной горизонтальной плоскости. Длина упругих элементов 11 выбирается из условия обеспечения частоты собственных колебаний уравновешенной платформы 2 с установленными на ней конструктивными элементами, равной величине порядка 0,05-0,1 от частоты кругового движения ω. Упругие опоры 4 позволяют валу 3 с уравновешенным ротором 1 поворачиваться вокруг оси, ограничивая его угловые колебания, и обеспечивают возврат ротора 1 в исходное состояние при остановке электродвигателя 6. В приведенном на фиг.2 варианте (сечение А-А) упругие опоры 4 выполнены, например, в виде радиально расположенных одинаковых спиц, равномерно распределенных по окружностям опор в плоскостях, перпендикулярных оси вала 3 и жестко закрепленных своими одними концами на внутренней поверхности цилиндрической обоймы 5, а другими - на внешней поверхности вала 3. Датчики 9 измерения величины неуравновешенности закреплены на внешней поверхности цилиндрической обоймы 5 на одном радиусе от оси вала 3 диаметрально противоположно, а их подвижные элементы 12 жестко соединены с валом 3 и расположены на одном радиусе диаметрально противоположно. Датчик опорного сигнала 8 установлен на электродвигателе 6 и выполнен, например, в виде оптопары, рабочий зазор которой перекрывается шторкой, закрепленной на инерционной массе 7 (на фиг.2 не показана); в момент прохождения инерционной массы оси чувствительности оптопары датчика опорного сигнала 8.
Измерения величины неуравновешенности и ее угловой координаты расположения балансируемого ротора осуществляется с помощью блока измерения (фиг.3), включающего датчики измерения неуравновешенности 9, датчик опорного сигнала 8, блок обработки сигналов датчиков 13, соединенный своими входами с выходами датчиков 9 и 8, блок измерения и индикации величины и угловой координаты неуравновешенности 14, соединенный своим входом с выходом блока 13.
Устройство (фиг.2) работает следующим образом. Балансируемый ротор 1 устанавливают и соосно закрепляют на валу 3. Обмотку электродвигателя 6 привода кругового движения подключают к источнику напряжения, и вал электродвигателя 6 вместе с эксцентрично закрепленной инерционной массой 7 приходит во вращательное движение с частотой ω. Значение частоты ω выбрано порядка 62,8 рад/с. При этом возникает центростремительная сила Fк (фиг.1), движущейся по круговой траектории инерционной массы 7, величина которой равна произведению движущейся массы, радиуса круговой траектории и квадрата частоты кругового движения. Вектор центростремительной силы Fк постоянно вращается с частотой ω в плоскости, перпендикулярной оси вращения, и приложен к общей оси вала электродвигателя 6 и вертикального вала 3 с балансируемым ротором 1, установленным на уравновешенной платформе 2. Уравновешенная платформа 2 вместе с установленным в упругих опорах 4 вертикальным валом 3, балансируемым ротором 1, электродвигателем 6, датчиками измерения неуравновешенности 9 и опорного сигнала 8 под действием центростремительной силы Fк, приходит в круговое движение с частотой ω. При таком движении все точки уравновешенной платформы 2 и балансируемого ротора 1 в горизонтальной плоскости описывают круговые траектории радиусом r. Величина радиуса r пропорциональна величине эксцентриситета инерционной массы 7 и определяется соотношением величины движущейся инерционной массы 7 и общей массы уравновешенной платформы 2 с установленными на ней конструктивными элементами и балансируемым ротором 1. Величина радиуса г выбрана равной 1,5-2 мм. Возникающая при круговом движении уравновешенной платформы 2 со всеми установленными на ней конструктивными элементами центростремительная сила Fц в каждый момент времени равна по величине, но противоположна по направлению центростремительной силе Fк. В результате полной компенсации сил в точках крепления упругих элементов 11 к уравновешенной платформе 2 практически отсутствуют динамические силы, действующие на станину 10. Остаток составляют лишь силы, равные проекциям вектора силы тяжести уравновешенной платформы 2 на горизонтальную плоскость при отклонении упругих элементов 11 в точках их крепления к уравновешенной платформе 2 от вертикального положения при круговом движении на величину r. При выбранной длине упругих элементов 11, обеспечивающей соотношение частоты собственных колебаний уравновешенной платформы к частоте ω, равное 0,05-0,1, величина проекции силы тяжести на горизонтальную плоскость уравновешенной платформы 2 со всеми установленными на ней конструктивными элементами и балансируемым ротором 1, не превысит величины 0,002-0,015 от ее суммарной силы тяжести.
Благодаря совмещению центра инерционной массы 7 с горизонтальной плоскостью, проходящей через центр общей массы уравновешенной платформы с установленными на ней конструктивными элементами и балансируемым ротором 1, исключен динамический вращающий момент, приложенный к центру общей массы платформы в вертикальной плоскости. Таким образом, существенно уменьшаются динамические воздействия на станину устройства и повышается точность определения неуравновешенности.
При круговом движении балансируемого ротора 1 вместе с уравновешенной платформой 2, при его неуравновешенности характеризующейся массой m, расположенной на радиусе R, в угловом положении α, ротор 1 совершает угловые колебания относительно уравновешенной платформы 2, амплитуда φ и фаза которых, однозначно определяют величину и угловую координату расположения его неуравновешенности (фиг.1). Амплитуда угловых колебаний ротора 1, вызванных его неуравновешенностью, измеряются датчиками измерения неуравновешенности 9, а фаза, определяющая угловую координату неуравновешенности, определяется с использованием сигнала с выхода датчика опорного сигнала 8 (фиг.3). Преобразованные в блоке обработки сигналов датчиков 13 сигналы поступают на вход блока измерения и индикации величины и угловой координаты неуравновешенности 14, где отображаются в виде измеренных значений величины и угловой координаты неуравновешенности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2270985C1 |
| СТАНОК ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 1993 |
|
RU2105962C1 |
| СТАНОК ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2005 |
|
RU2299409C1 |
| Способ балансировки деталей вращения и устройство для его осуществления | 1984 |
|
SU1247702A1 |
| Устройство для балансировки ротора | 2022 |
|
RU2795641C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2007 |
|
RU2336509C1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| СТЕНД БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2010 |
|
RU2480727C2 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2009 |
|
RU2441211C2 |
Изобретения относятся к измерительной технике. Способ заключается в следующем. Сообщают движения балансируемому ротору и уравновешенному телу в плоскости, перпендикулярной их общей оси, измеряют амплитуды и фазы возникающих угловых колебаний балансируемого ротора и определяют величины неуравновешенности и угловой координаты ее расположения. Причем в плоскости кругового движения центра общей массы балансируемого ротора и уравновешенного тела к их общей оси в каждый момент времени прикладывают силу, равную по величине, но противоположную по направлению центростремительной силе общей массы балансируемого ротора и уравновешенного тела. Устройство состоит из станины, уравновешенной платформы, подвешенной на станине на упругих элементах, вертикального вала с соосно закрепленным на одном конце балансируемым ротором, установленным другим концом в упругих опорах в центре уравновешенной платформы, перпендикулярно ее плоскости, привода кругового движения и блока измерения. Причем упругие элементы в количестве не менее трех выполнены одинаковыми, установлены вертикально и жестко закреплены одними концами на уравновешенной платформе в точках, равноудаленных относительно друг друга и от ее центра, а другими концами жестко закреплены на станине в точках, лежащих в одной горизонтальной плоскости. Привод кругового движения выполнен в виде электродвигателя, установленного на уравновешенной платформе в ее центре так, что ось вала электродвигателя перпендикулярна плоскости платформы, на валу электродвигателя закреплена инерционная масса с заданным эксцентриситетом, центр которой расположен в горизонтальной плоскости, проходящей через центр общей массы уравновешенной платформы с установленными на ней конструктивными элементами. Технический результат заключается в повышении точности балансировки. 2 н.п. ф-лы, 3 ил.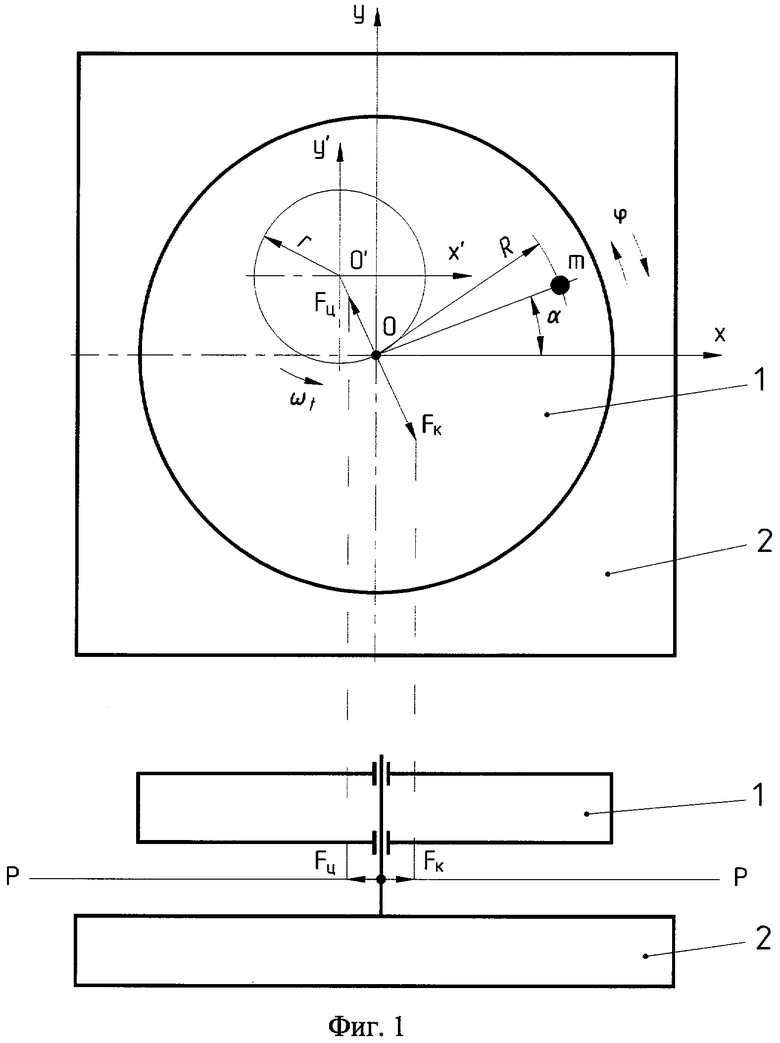
1. Способ балансировки роторов, состоящий в сообщении кругового движения балансируемому ротору и уравновешенному телу в плоскости, перпендикулярной их общей оси, расположенным с возможностью относительного углового смещения, измерении амплитуды и фазы возникающих угловых колебаний балансируемого ротора относительно уравновешенного тела и определении по результатам измерений величины неуравновешенности и угловой координаты ее расположения, отличающийся тем, что в плоскости кругового движения центра общей массы балансируемого ротора и уравновешенного тела к их общей оси в каждый момент времени прикладывают силу, равную по величине, но противоположную по направлению центростремительной силе общей массы балансируемого ротора и уравновешенного тела.
2. Устройство для балансировки роторов, содержащее станину, уравновешенную платформу, подвешенную на станине на упругих элементах, вертикальный вал с соосно закрепленным на одном конце балансируемым ротором, установленный другим концом в упругих опорах в центре уравновешенной платформы перпендикулярно ее плоскости с возможностью его угловых колебаний, привод кругового движения и блок измерения, включающий датчики измерения неуравновешенности, датчик опорного сигнала, блок обработки сигналов датчиков, соединенный своими входами с выходами датчиков измерения неуравновешенности и опорного сигнала, блок измерения и индикации величины и угловой координаты неуравновешенности, соединенный своим входом с выходом блока обработки сигналов датчиков, отличающееся тем, что упругие элементы в количестве не менее трех выполнены одинаковыми, установлены вертикально и жестко закреплены одними концами на уравновешенной платформе в точках, равноудаленных относительно друг друга и от ее центра, а другими концами жестко закреплены на станине в точках, лежащих в одной горизонтальной плоскости, а привод кругового движения выполнен в виде электродвигателя, установленного на уравновешенной платформе в ее центре так, что ось вала электродвигателя перпендикулярна плоскости платформы, на валу электродвигателя закреплена инерционная масса с заданным эксцентриситетом, центр которой расположен в горизонтальной плоскости, проходящей через центр общей массы уравновешенной платформы с установленными на ней приводом кругового движения, валом с балансируемым ротором, упругими опорами и датчиками измерения неуравновешенности и опорного сигнала.
| СТАНОК ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 1993 |
|
RU2105962C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2270985C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИДЕТАЛЕЙ | 0 |
|
SU289325A1 |
| БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО | 0 |
|
SU396575A1 |

