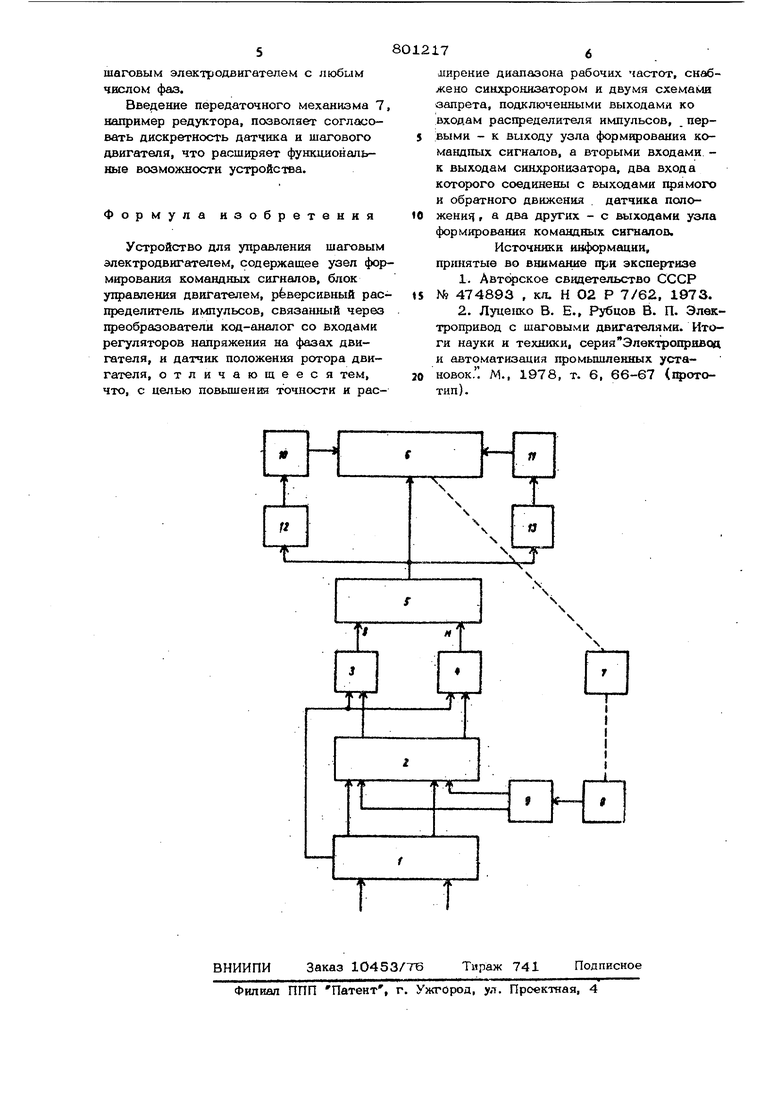
Изобретение относится к электроприводу и может быть использовано в системах автоматического управления с шаговыми двигателями, в частности в системах программного управления Известно устроил во для управления шаговым двигателем, содержащее распределитель импульсов, усилители мощности, коммутирующие фазы двигателя и преобразователи; код-аналог, связьшающие выходы распределителя импульсов с регуляторами напряжения на фазах двигателя 13Наиболее близким к предлагаемому по технической сущности является устройство для управления шаговым электр двигателем, содержащее узел формирования командных сигналов, блок управле ния двигателем, реверсивный распредели тель импульсов, связанный через преобразователи код- аналог со входа.ми ре гуляторов напряжения на фазах двигателя, и датчик положения ротора двигателя 2. Недостатки известных устройств лизкая точность отработки шага и ограниченный диапазон рабочих частот, что связано с невозможностью одновременного использования дробления шага и обратной связи по положению. Цель изобретения - повышение точности и расширение диапазона рабочих частот. Указанная цель достигается тем, что устройство снабжено синхронизатором и двумя схемами запрета, подключенными выходами ко входам распределителя импульсов, первыми входами - к выходу узла формирования командных сигналов, а вторыми входами - к выходам синхронизатора, два входа которого соединены с Рыходами прямого и обратного движения датчика положения, а два других с выходами узла .формирования командных сигналов. Такое выполнение . ;устройства обеспечивает работу шагового электродвигатея в замкнутом режиме с электричесКИМ дроблением шага что повышает точность, плавность flBi-DKeHHH и расширяет диапазон рабочих частот. На чертеже приведена структурная схема устройства применительно к четырехфазному шаговому двигателю. Устройство содержит узел 1 формирования командных сигналов, синхронизатор 2, схемы 3 и 4 запрета, реверсивный распределитель 5, импульсов, выходы которого подключены к блоку управления и шаговому двигателю 6, на валу которого через передаточный меха- низм 7 установлен импульсный, датчик 8 положения со схемой 9 выделения направ ления движения, выходы которой подключены ко входам синхронизатора 2. Выход реверсивного распределителя 5 связаны также со входами регуляторов 10 и 11 напряжения через преобразователи коданалог L2 и 13. Устройство работает следующим образом. В исходном состоянии по сигналу узл 1 формирования команд схемы 3 и 4 запрета не пропускают импульсы от схемы 9 выделения направления движения на входы реверсивного распределителя 5 им пульсов. При этом распределитель S ймпульсов через блок управления 6. устанав ливает некоторую комбинацию включенных фаз шагового электродвигателя, а 1феобразоватепи код-аналог 12 и 13 вы батывают на входах регуляторов 1О и 1 напряжения уставки, величина кагорьгх . определяется состоянием распределителя 5. Регуляторы напряжения устанавливаю иа включенных фазах двигателя постоянною напряжения (токи) и ротор фиксируется в положении, , .определяемом комби нацией включенных фаз и величинами напряжений (токов) на этих фазах. Такое состояние устройства не изменяется при снятии сигнала запрета со схем 3 и 4 аг узла 1, посколькуротор шагового дз гателя неподвижен и импульсы от датчик 8 не поступают. Выходы схемы 9 выделения направления движения соединены таким , чтобы при перемещении ротора под действием внешних причин в -ту или иную сторону импульсы от дат чика 8 вызывали такое же пространстве ное пермеш.ение результирующего магнит ного поля статора, обусловленное изм нением состояния распределителя 5 импульсоЕ. При этом электромагннтньп момент двигателя будет равен нулю. Для , Создания электромагнитного момента и приведения ротора в движени апример вперед, снимавот сигнал запреа, поступающий от узла 1 формироваия команд на схемы 3 и 4, и подают ерез синхронизатор 2 и схему з запрета а вход О распределителя 5- некоторое оличество импульсов; число которых не превьпцает половины числа тактов коммутации распределителя 5. При этом вектор магнитного поля статора смещается в положение, вызывающее движение ротора вперед. Импульсы от датчика 8 положения через синхрошкзатор 2 и схему 3 запрета поступают aai вход - распределителя 5, обеспечивая перемещение вектора магнитного поля статора сюгхронно. с движением ротора и поддерживая внесенное рассогласование. Момент, развиваемый двигателем, пропорционален этому рассогласованию (числу импульсов, поданных на вход распределителя от узла формирования команд) и работа устройства в этом режиме эквивалента режиму двигателя постоянного тока. Изменяя число поданных на вход 6 распределителя 5 командных импульсов, т.е. изменяя величину рассогласования, обеспечиваЕот разгон двигателя с заданным динамическим моментом, в том числе с моментом, близким к максимальному. Для уменьшения электрического момента шагового двигателя в предлагаемом режиме (движение вперед) необхо- , димо уменьшить Величину рассогласования, что достигается подачей командных импульсов на вход и реверсивного распределителя 5. Если число импульсов равно числу импульсов, поданных первоначально на вход , то рассогласование равно нулю и момент двигателя также равен нулю. Подача- на вход И большего числа импульсов вызывает изменение знака электромагнитного момента, что соответствует .реверсу электродвигателя. Синхронизатор 2 служит для разделения во времени следующих с различ}1ыми частотами командных импульсов и импульсов обратной связи. Формируя на входах узла 1 команд необходимые команды и последовательности импульсов, можно обеспечить работу шагового электродвигателя в любом из предлагаемых режимов, получая при этом (в зависимости от назначения системы) слежение, позиционирование и программирование движения. Предлагаемое устройство при составляющем числе регуляторов напряжения и каналов коммутации блока управления : может быть использовано для управления
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсивным шаговым электродвигателем | 1975 |
|
SU752727A1 |
| Устройство для управления шаговым двигателем | 1980 |
|
SU936341A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1982 |
|
SU1045320A1 |
| Замкнутый шаговый электропривод | 1984 |
|
SU1259465A1 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1098099A1 |
| СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ПООЧЕРЕДНОГО УПРАВЛЕНИЯ n-ИСПОЛНИТЕЛЬНЫМИ УСТРОЙСТВАМИ | 1967 |
|
SU224638A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Устройство для управления шаговым двигателем | 1975 |
|
SU699646A2 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
