(5) УСТРОЙСТВО для УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Замкнутый шаговый электропривод | 1984 |
|
SU1259465A1 |
| Замкнутый шаговый электропривод | 1988 |
|
SU1511840A2 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Дискретный замкнутый электропривод | 1983 |
|
SU1159146A1 |
| Устройство для измерения ошибок позиционирования шагового электродвигателя | 1990 |
|
SU1697254A1 |
| Устройство для управления шаговымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU801217A1 |
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| Устройство для проверки синусно-косинусных вращающихся трансформаторов | 1980 |
|
SU924738A1 |

1
Изобретение относится к электротехнике и может-быть использовано для ..управления шаговыми электродви- ; гателями с электрическим дроблением шага в системах числового программного управления (ЧПУ) металлорежущими станками, координатографами и т.д.
Известно устройство для управления шаговым электродвигателем, содержащее Q усилители мощности, коммутирующие фазы двигателя, управляемые от датчика положения, установленного на валу двигателя l j.
Недостатком этого устройства является небольшой диапазон регулирования скорости и положения, что обусловлено ограниченным числом тактов коммутации шагового двигателя и не- 20 возможностью получения требуемого угла коммутации фаз, определяющего в , конечном итоге скорость движения замкнутого шагового электроприрода.
Наиболее близким к предлагаемому является устройство для управления шаговым электродвигателем с электрическим дроблением шага и датчиком положения на валу, содержащее усилители мощности, преобразователи коданалог, постоянные запоминающие устройства, сумматор и блок управления. Ойо осуществляет электрическое дробление шага, уменьшающее дискретность регулирования положения вала двигателя и расширяющее диапазвн регулирования скорости путем изменения с малой дискретностью угла коммутации фаз 2j.
5
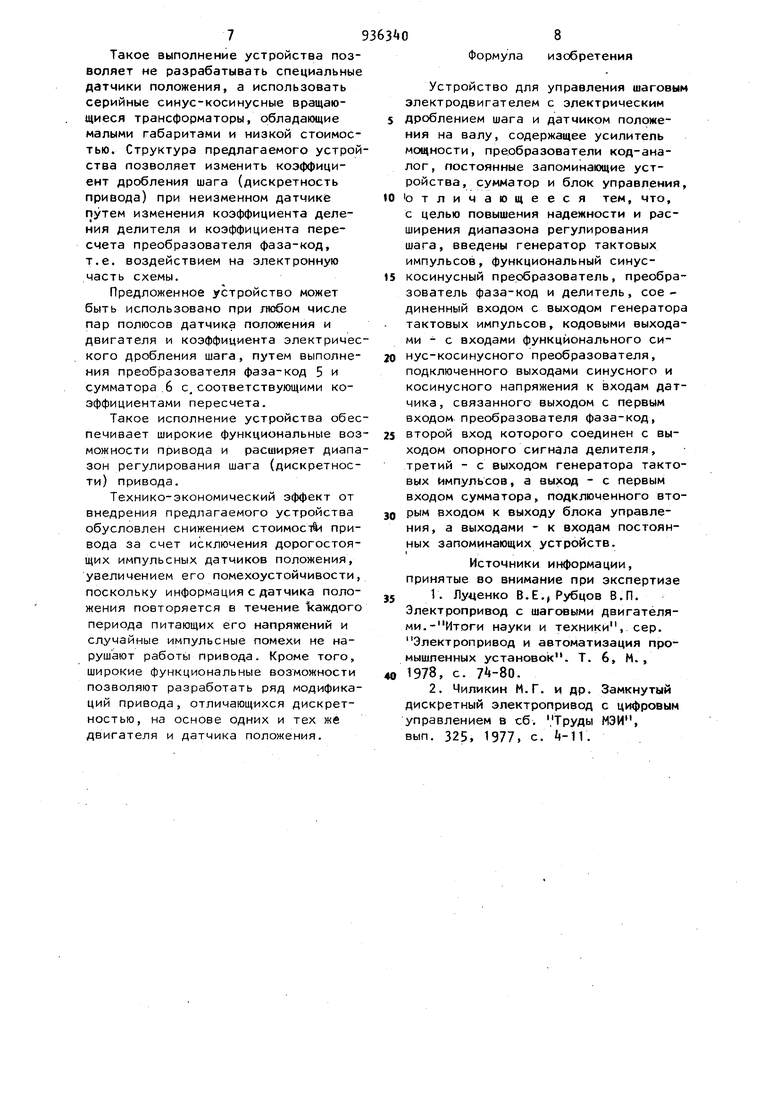
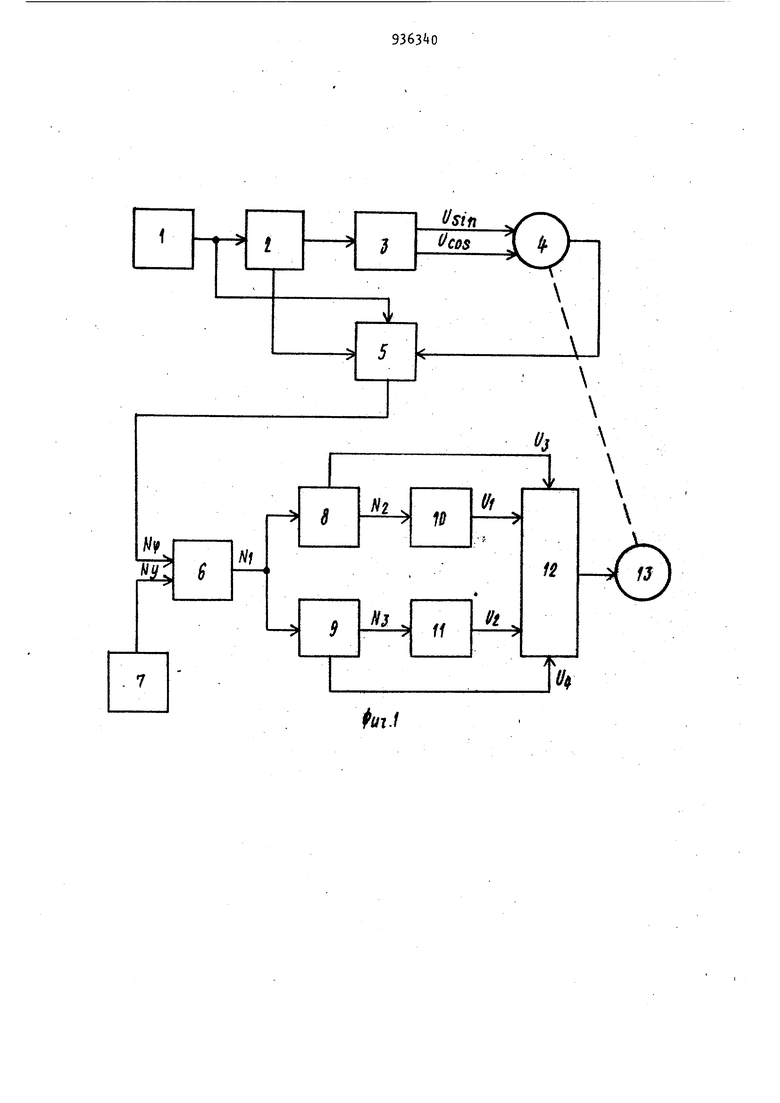
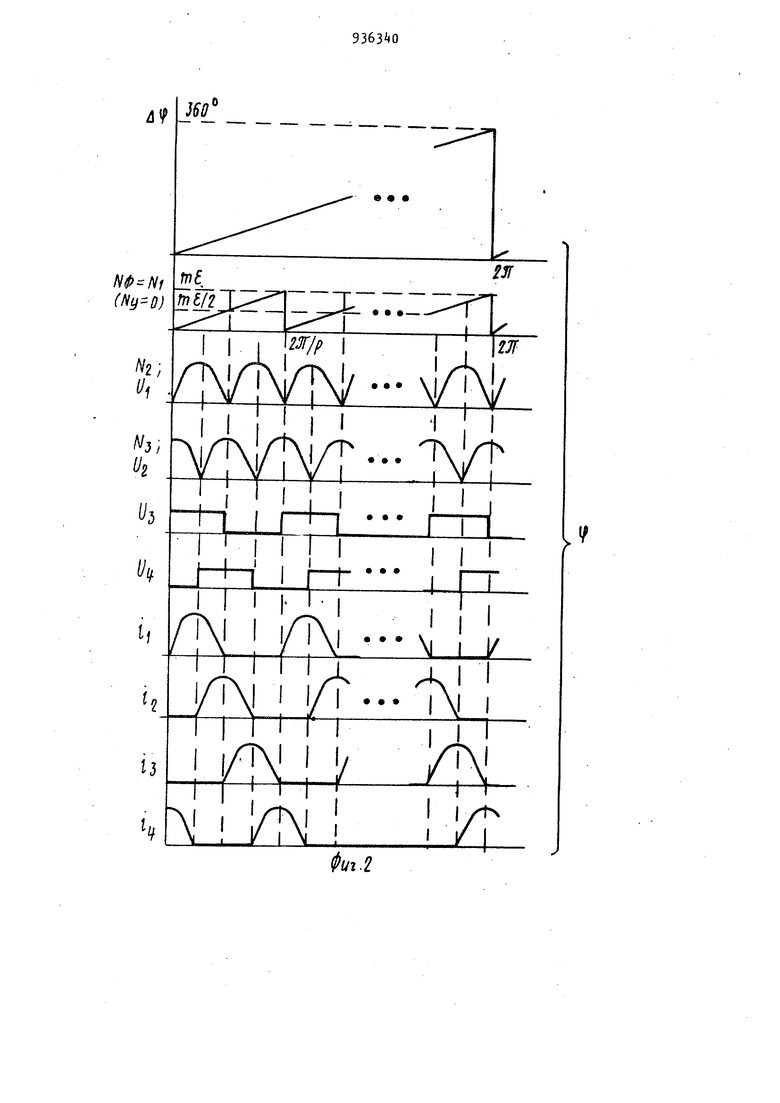
Недостатком устройства является низкая надежность, обусловленная использованием импульсного (инкре-. ментного) датчика положения и счетчиков, обладающих низкой помехоустойчивостью. Кроме того, выполнение .импульсного датчика положения при больших кратностях электрического дробления шага (малых дискретностях привода) представляет собой трудноразрешимую технологическую задачу, поскольку его разрешающая способнос (число импульсов за оборот) должна быть равна или кратна разрешающей способности привода. Применение импульсного датчика вызывает усложнение схемы, обусловленное необходимостью введения элементов, обеспечи вающих временную синхронизацию импульсов управления и импульсов обра ной связи, поступающих с датчика. Цель изобретения - повышение надежности и расширение диапазона регулирования шага (дискретности). Поставленная цель достигается тем, что в устройство для управлени шаговым электродвигателем с датчико положения на валу, содержащем усили тели мощности, преобразователи коданалог, постоянные запоминающие .устройства, сумматор и блок управления, вверены генератор тактовых импульсов, функциональный синус-косинусный преобразователь, преобразо ватель фаза-код и делитель, соедине ный входом с выходом генератора так товых импульсов, кодовыми входами с входами функционального синус-косинусного преобразователя, подключе ного выходами синусного и косинусного напряжений к входам датчика, связанного выходом с первым входом преобразователя фаза-код, второй ВХОД которого соединен с выходом оп ного сигнала делителя, третий - с выходом генератора тактобых импульсов, а выход - с первым входом сумматора , подключенного вторым входом к выходу блока управления, а выхода МИ - к входам постоянных запоминающих устройств. На фиг. 1 приведена структурная схема предлагаемого устройства; на фиг. 2 и 3 - временные-диаграммы, поясняющие его работу. Устройство (фиг. 1) содержит генератор тактовых импульсов 1, делитель 2, функциональный синус-косинусный преобразователь 3. выходы синусоидального UgJ.. и косинусоидал ного напряжений которого подключены к входам двухфазного датчика положения (например, вращающегося трансформатора). Выход датчика положения k и выход опорного сигнала делителя 2 соединены с двумя входами преобразователя фаза-код 5, третий вход которого подключен к выходу генератора 1. Выход преобразователя фаза - код 5 подключен к одному из входов сумматора 6, соединенного вторым своим входом с выходом блока управления 7- Выходы сумматора через постоянные запоминающие устройства 8 и 9 и. преобразователи код-аналог 10 и 11 соединены со входами усилителя мощности 12, коммутирующего фазы шагового двигателя 13. Устройство работает следующим образом . В исходном состоянии на выходе блока управления 7 сформирован нулевой код, т.е. . Преобразователь фаза-код 5 в каждом периоде напряжений и и и е , .питающих фазы датчика k и формируемых посредством генератора 1 , делителя 2 и функционального преобразователя 3, преобразует фазу выходного напряжения датчика k относительно опорного сигнала, постугуэющего с делителя 2, в код Ni(), единице которого соответствует шаг двигателя в схеме с электрическим дроблением. Для работЫ схемы необходимо, чтобы код на выходе преобразователя фаза-код 5 был связан с углом поворота, соединенных между собой валов датчика и двигателя 13 и их параметрами соотношением N -kmg. угол поворота вала двигагдетеля (датчика); коэффициент электрического дробления шага; ( естественный шаг двигателя; число фаз двигателя; | целая часть числа k-- dim р - число пар полюсов двигателя, код NI/) определяет положение. ротора шаговог двигателя внутри его полюсного деления f 27Г|рВыходной код сумматора 6, который в этом случае () будет равен N( N,, через постоянные запоминающие устройства 8.и 9. преобразователи код-аналог 10 и 11 и усилитель мощности 12 устанавливает некоторую комбинацию включенных фаз двигателя 13 и величин фазных токов так, что результирующий вектор магнитного | поля статора совпадает с продольной осью ротора. Jлектромагнитный момент двигателя при этом равен нулю. Рассмотренное состояние устройства соответствует началу отсчета на временных диаграммах, приведенных на фиг. 2 (диаграммы построены для примера использования датчика с одной парой полюсов). Если в таком режиме () к вал двигателя приложить внешний вращающ момент, то под его действием вал дв гателя, а вместе с ним и вал датчика, придут в движение. При этом фаза выходного напряжения датчика 1 относительно опорного сигнала делителя 2 Д (фиг. 2) будет линейно изменяться в течение каждого оборота на Збо. Преобразователь фаза-код 5 преобразует это изменение фазы в ли нейный циклический код N с периодо повторения и максимальным значением m единиц (фиг. 2). Так как , то выходной код сумматора 6. будет повторять код Ny, т.е. . Код N с помощью постоянных запоминающих устройств 8 и 9 преобразуется в ступенчато-синусоидальные коды Nj и N (фиг. 2), которые, в свою очередь, преобразуются линейными преобразователями код-аналог 10 и 11 в ступенчато-синусоидальные напряжения и и и 2, определяющие уставки фазных токов (для упрощения на фиг. 2 и 3 ступенчато-синусоидал ные коды и напряжения представлены их огибающей). Кроме того, постоянные запоминающие устройства 8 и 9 формируют сигналы U и Ui, осуществляющие коммутацию ключевых элементов усилителя мощности в срответстВИИ с выбранной диаграммой коммутаци шагового двигателя. В результате сов местного действия напряжений U ...LL усилитель мощности 12 формирует в фа зах шагового двигателя токи i ... i (фиг. 2). При этом смещение ротора шагового двигателя под действием внешних сил вызывает такое же смещение результирующего вектора магнит ного поля статора и электромагнитный момент, развиваемый двигателем, буде оставаться равным нулю (при малых кратностях дробления внутри каждого исскуственного шагао си . будет иметь место некоторый фиксирующий момент, развиваемый двигателем, обус ловленный дискретным характером перемещения результирующего вектора ма нитного поля статора). Для создания электромагнитного момента и приведения ротора шагового . двигателя в движение, например вперед, с помощью блока управления 7 на второй вход сумматора 6 подают код (фиг. 1 и 3) . максимальное значение которого не должно превышать . При этом код N N,j+Ny на выходе сумматора 6 получает приращение, что эквивалентно его сдвигу на угол Чк (фиг. 3). Соответствующий сдвиг получают токи ... i и результирующий вектор электромагнитного момента, положение которого определяется кодом N ,. смещается относительно пррдольной оси ротора шагового двигателя, определяемой кодом N, что вызывает электромагнитный момент и приводит 8 движение вал двигателя. Циклический код с выхода преобразователя фаза-код 5f суммируемый с кодом N вызывает перемещение результирующего вектора магнитного поля статора синхронно с движением ротора. При этом Поддерживается рассогласование вектора поля и оси ротора, заданные кодом Ny. Для работы схемы необходимо, чтобы сумматор 6 работал по циклическому закону так, чтобы максимальное значение кода на его выходе N. не превышало значения m , т.е. . Работа сумматора описы.вается соотношениями iNujtNu при (Nл+N,)me N,: N -meпpи (,,)mf fjI-Ny при (Nv()-Ny)0 Nvf-N -fm при (Nvf-Nv)0 Момент, развиваемый двигателем, пропорционален рассогласованию результирующего вектора магнитного поля статора и оси ротора (коду N) и работа устройства в этом режиме эквивалентна разгону двигателя постоянного тока. Меняя величину кода N. на втором входе сумматора 6, можно обеспечить любое значение электромагнитного момента двигателя. Подача на второй вход сумматора 6 отрицательного дополнительного) кода вызывает изменение знака момента, развиваемого двигателем. Формируя на втором входе сумматора 6 с помощью блока управления 7 необходимые значения кода Ny, можно обеспечить работу шагового привода в любом режиме, получая в зависимости от назначения системы слежения, позиционирование и программирование движения. Такое выполнение устройства позволяет не разрабатывать специальные датчики положения, а использовать серийные синус-косинусные вращающиеся трансформаторы, обладающие малыми габаритами и низкой стоимостью. Структура предлагаемого устрой ства позволяет изменить коэффициент дробления шага (дискретность привода) при неизменном датчике путем изменения коэффициента деления делителя и коэффициента пересчета преобразователя фаза-код, т.е. воздействием на электронную часть схемы. Предложенное устройство может быть использовано при любом числе пар полюсов датчика положения и двигателя и коэффициента электричес кого дробления шага, путем выполнения преобразователя фаза-код 5 и сумматора .6 с.соответствующими коэффициентами пересчета. Такое исполнение устройства обес печивает широкие функциональные воз можности привода и расширяет диапа зон регулирования шага (дискретности) привода. Технико-экономический эффект от внедрения предлагаемого устройства обусловлен снижением стоимости привода за счет исключения дорогостоящих импульсных датчиков положения, увеличением его помехоустойчивости поскольку информация с датчика положения повторяется в течение 1 аждого периода питающих его напряжений и случайные импульсные помехи не нарушают работы привода. Кроме того, широкие функциональные возможности позволяют разработать ряд модифика ций привода, отличающихся дискретностью, на основе одних и тех же двигателя и датчика положения. 8 Формула изобретения Устройство для управления шаговым электродвигателем с электрическим дроблением шага и датчиком положения на валу, содержащее усилитель мощности, преобразователи код-аналог, постоянные запоминающие устройства, сумматор и блок управления, отличающееся тем, что, с целью повышения надежности и расширения диапазона регулирования шага, введены генератор тактовых импульсов, функциональный синускосинусный преобразователь, преобразователь фаза-код и делитель, соединенный входом с выходом генератора тактовых импульсов, кодовыми выходами - с входами функционального синус-косинусного преобразователя, подключенного выходами синусного и косинусного напряжения к входам датчика, связанного выходом с первым входом преобразователя фаза-код, второй вход которого соединен с выходом опорного сигнала делителя, третий - с выходом генератора тактовых импульсов, а выход - с первым входом сумматора, подключенного вторым входом к выходу блока управления, а выходами - к входам постоянных запоминающих устройств. I. , Источники информации, принятые во внимание при экспертизе 1. Лученко В,Е., Рубцов В.П. Электропривод с шаговыми двигателями.- Итоги науки и техники, сер. Электропривод и автоматизация промышленных установок. Т. 6, М., 1978, с. . 2. Чиликин М.Г. и др. Замкнутый дискретный электропривод с цифровым управлением в сб. Труды МЭИ, вып. 325, 1977, с. .
т
&
1
t-fT
I
Л I
Фиг.2
