Известны устройства поочередной подстройки параметров и объектов, информация о состоянии которых последовательно с  датчиков через коммутирующую схему поступает на один из входов устройства, вырабатывающего управляющий сигнал (устройства сравнения). На другой вход устройства сравнения подаются эталонные сигналы. Недостатком указанных схем является наличие большого числа коммутирующих электромеханических элементов.
датчиков через коммутирующую схему поступает на один из входов устройства, вырабатывающего управляющий сигнал (устройства сравнения). На другой вход устройства сравнения подаются эталонные сигналы. Недостатком указанных схем является наличие большого числа коммутирующих электромеханических элементов.
Предлагаемая следящая система отличается от известных тем, что для повышения надежности, уменьшения числа коммутирующих элементов и потребляемой мощности исполнительные шаговые двигатели активного типа через управляемые дроссели подключены к магнитному распределителю исполнительных импульсов. Один вход устройства сравнения через двухобмоточное магнитно-управляемое реле подключен к настраиваемому датчику, а другой - непосредственно к источнику эталонного сигнала. Управляющие входы магнито-управляемых реле и управляемых дросселей соединены с выходами импульсного датчика.
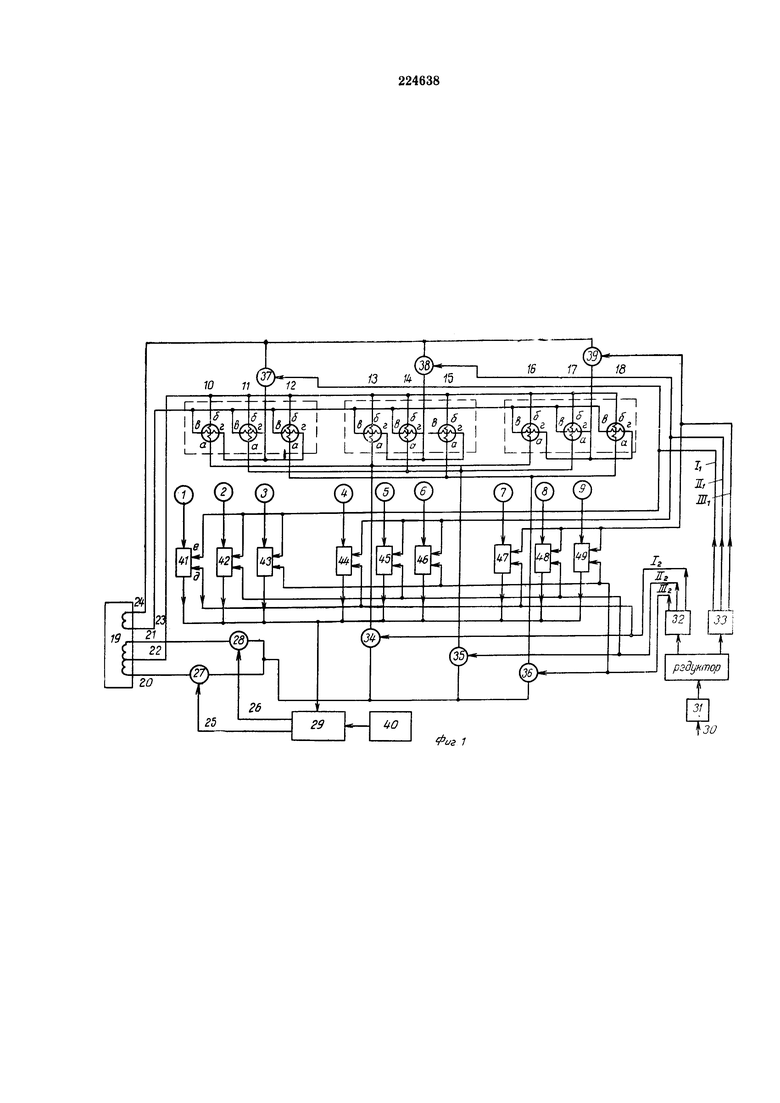
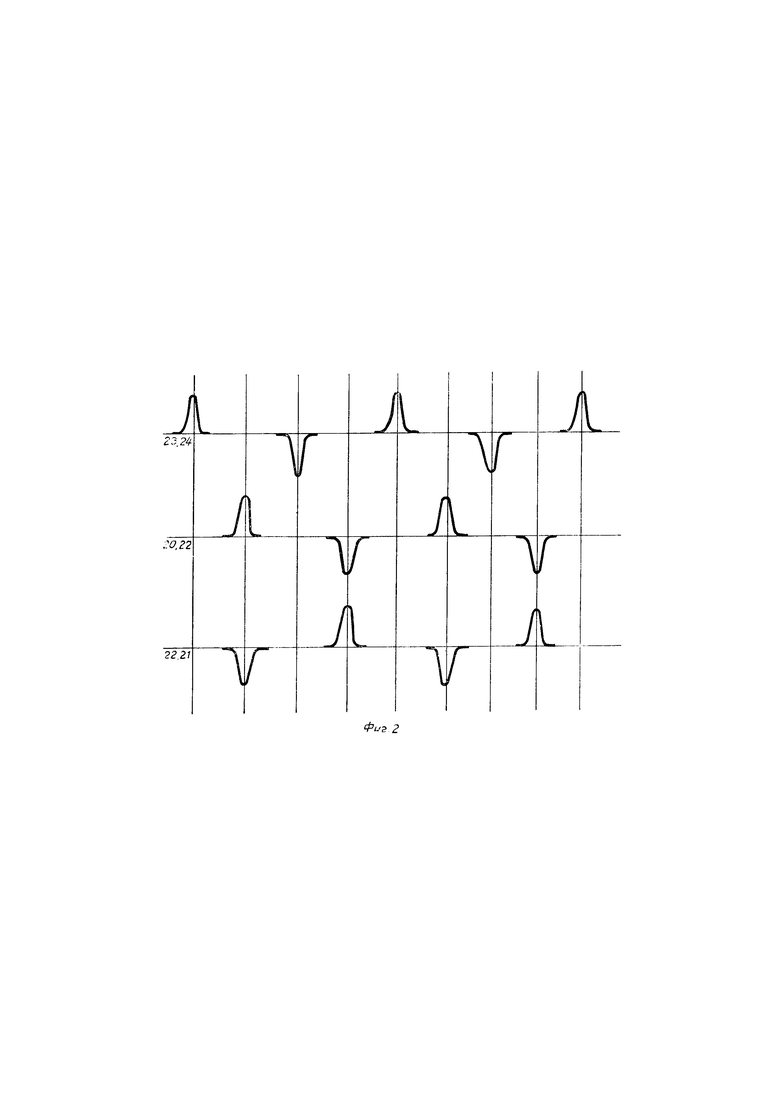
На фиг. 1 представлена функциональная схема предлагаемой бесконтактной шаговой следящей системы; на фиг. 2 временная диаграмма исполнительных импульсов.
В процессе работы необходимо производить подстройку датчиков 1-9, что осуществляется путем реверсивного вращения их выходных валов от соответствующих каждому датчику шаговых двигателей 10-18, которые управляются по двум фазам с магнитного распределителя 19 разнополярных управляющих импульсов. Длительность и амплитуда каждого из управляющих импульсов достаточны для поворота исполнительного двигателя на один шаг. Фаза (клеммы) 20 и 21 распределителя импульсов выполнена со средней точкой (клемма) 22, другая фаза - клеммы 23 и 24.
Шаговые двигатели 10 и 18 выполняются таким образом, что при воздействии исполнительного импульса соответствующей полярности в статорной обмотке ротор поворачивается на единичный шаг. Для создания необхмодимой плавности движения при работе системы в замкнутом режиме предусмотрена специальная вспомогательная обмотка, которая вместе с вращающимся полым стаканом на роторе создает необходимое демпфирование.
При наличии сигнала управления на клеммах 23, 24 и 20, 22 обеспечивается вращение подключаемого шагового двигателя по часовой стрелке, при наличии сигналов на клеммах 23 и 24 и 22, 21 - противоположное. Управление включением клемм 20, 22 или 22, 21 производится по сигналу, поступающему на входы 25 и 26 управляемых дросселей 27 и 28 соответственно с устройства сравнения 29.
Для рассмотрения существа работы предлагаемого устройства несколько упрощена система, в частности число подстраиваемых датчиков равно девяти, которые (см. фиг. 1) разбиты на три группы по три датчика в каждой группе.
На вход 30 шагового двигателя 31 поступает последовательность импульсов, период следования которых определяется временем, необходимым для подстройки любого из датчиков в случае максимального рассогласования. При воздействии очередного импульса ротор шагового двигателя 31 поворачивается на единичный шаг, и через редуктор вращаются роторы бесконтактных импульсных датчиков 32 и 33. С импульсного датчика 32 за его полный оборот поступает число сигналов, равное числу элементов в группе, в данном случае три, а с выхода импульсного датчика 33 - равное числу групп, в данном случае три, причем за время существования сигнала с выхода I1 импульсного датчика 33 сигнал с импульсного датчика 32 поступает последовательно с выхода I2, далее с выхода II2 и с выхода III2 при каждом повороте ротора шагового двигателя 31 на единичный шаг.
После трех шагов двигателя 31 поступает сигнал с выхода II1 импульсного датчика 33 (также в течение трех шагов двигателя 31) и при каждом шаге - сигнал с выходов I2, II2 и III2 импульсного датчика 32.
Управление включением шаговых двигателей 10-18 по фазам производится с выходом импульсных датчиков 32 и 33 через схемы запрета, выполненные по схеме управляемого дросселя 34-36 и 37-39.
Одновременно сигналы с выходов датчиков 32 и 33 подаются на подключение соответствующего датчика к эталону 40 для определения знака рассогласования.
Подключение данных датчиков к эталону осуществляется через двухобмоточные магнито-управляемые реле 41-49, находящиеся в нормально разомкнутом положении. Замыкание реле происходит только в случае одновременного присутствия сигналов на его управляющих входах. При этом контакты реле замыкаются, и датчик подключается к эталону через схему сравнения, с которой подается сигнал, определяющий направление вращения исполнительного шагового двигателя подстраиваемого датчика.
Предположим, что при поступлении очередного импульса на вход 30 вал шагового двигателя 31 занял положение, при ктором поступает сигнал с выхода I2 импульсного датчика 32 и выхода I1 импульсного датчика 33.
По сигналу с выхода I2 импульсного датчика 32 включаются фазы а и б всех первых шаговых двигателей все всех группах через управляемый дроссель 34; по сигналу с выхода I1 импульсного датчика 33 включаются фазы в и г всех шаговых двигателей в первой группе через управляемый дроссель 37.
При таком включении оказывается, что только у шагового двигателя 10 включены обе фазы а, б и в, г, у остальных же шаговых двигателей включена только одна фаза а, б или в, г.
Одновременно этот же сигнал с выхода I2 импульсного датчика 32 и с выхода I1 импульсного датчика 33 подается на магнито-управляемые реле, так что сигнал с выхода I2 импульсного датчика 32 подается на входы  всех первых магнито-управляемых реле во всех группах, а с выхода I1 импульсного датчика 33 - на входы е всех реле в первой группе, таким образом только в магнито-управляемом реле 41 обе обмотки находятся под током, при этом контакты его замыкаются, и датчик 1 через реле 41 подключается к устройству сравнения 29 для определения знака разности сигнала с датчика и эталонного.
всех первых магнито-управляемых реле во всех группах, а с выхода I1 импульсного датчика 33 - на входы е всех реле в первой группе, таким образом только в магнито-управляемом реле 41 обе обмотки находятся под током, при этом контакты его замыкаются, и датчик 1 через реле 41 подключается к устройству сравнения 29 для определения знака разности сигнала с датчика и эталонного.
В зависимости от знака рассогласования устройство сравнения 29 открывает управляемые дроссели 27 или 28, обеспечивая тем самым соответствующее направление вращения шагового двигателя подстраиваемого датчика со скоростью определяемой частотой следования вырабатываемых распределителем 19 импульсов.
Время подстройки датчика определяется величиной рассогласования. После окончания подстройки сигнал с выхода устройства сравнения снимается, и шаговый двигатель 10 останавливается.
При поступлении следующего импульса на вход 30 шаговый двигатель 31 делает еще один шаг, при этом появляется сигнал с выхода II2 импульсного датчика 32 и с выхода I1 импульсного датчика 33 и включаются обе фазы шагового двигателя 11 по сигналу на входе 25 или входе 26.
Все датчики 1-9 подстраиваются последовательно. После окончания одного цикла настройка начинается опять с первого датчика в первой группе.
Преимуществом данной схемы коммутации управлением исполнительных шаговых двигателей является большая надежность, так как все узлы этого устройства выполнены на бесконтактных электромагнитных элементах. Управление шаговыми двигателями 10-18 осуществляется так, что число элементов управления (управляемых дросселей) равно сумме числа групп и числа подстраиваемых элементов в группе, а число подстраиваемых элементов - произведению указанных слагаемых.
Следящая система для поочередного управления  устройствами, содержащая устройство сравнения, подстраиваемые датчики, источник эталонного сигнала, управляемые дроссели, магнито-управляемые реле, импульсный датчик, исполнительные шаговые двигатели и двухфазный магнитный распределитель исполнительных импульсов, отличающаяся тем, что, с целью повышения надежности, уменьшения числа коммутирующих элементов и потребляемой мощности, исполнительные шаговые двигатели через управляемые дроссели подключены к магнитному распределителю, один вход устройства сравнения через двухобмоточное магнитно-управляемое реле подключен к настраиваемому датчику, а другой - непосредственно к источнику эталонного сигнала, причем управляющие входы магнито-управляемых реле и управляемых дросселей соединены с выходами импульсного датчика.
устройствами, содержащая устройство сравнения, подстраиваемые датчики, источник эталонного сигнала, управляемые дроссели, магнито-управляемые реле, импульсный датчик, исполнительные шаговые двигатели и двухфазный магнитный распределитель исполнительных импульсов, отличающаяся тем, что, с целью повышения надежности, уменьшения числа коммутирующих элементов и потребляемой мощности, исполнительные шаговые двигатели через управляемые дроссели подключены к магнитному распределителю, один вход устройства сравнения через двухобмоточное магнитно-управляемое реле подключен к настраиваемому датчику, а другой - непосредственно к источнику эталонного сигнала, причем управляющие входы магнито-управляемых реле и управляемых дросселей соединены с выходами импульсного датчика.
