I
Изобретение касается регулируемых, в частности, шаговых электроприводов переменного тока, построенных, например, на базе асинхронных двигателей с фазным ротором, и может быть использовано в системах точного позиционирования, приводах подъемных механизмов и т. п.
По основному авт. св. № 472432 описано устройство для управления шаговым двигателем переменного тока (асинхронным двигателем с фазным ротором), точность позиционирования и динамические показатели которого зависят от задаваемой цены шага ротора. Это устройство состоит из двух каналов управления инверторами статора и ротора двигателя, подключенными к соответствующим выпрямителям, и 1 нератора импульсов, выход которого соединен с первыми входами обоих каналов управления, каждый из которых состоит из последовательно соединенных смесителя частоты, делителя частоты, распределителя импульсов и блока
согласования. Вторые же входы каналов управления соединены с соответствующими управляющими входак и устройства вперед и назад.
Устройство обеспечивает отработку двигателем задания, равного разности числа импульсов, поступающих на его управл5пощие входы.
Недостатком известного устройства является увеличение относительной статической ошибкис уменьшением цены шага, а также снижение быстродействия привода.
Целью изобретения являются повышение точности и быстродействия привода.
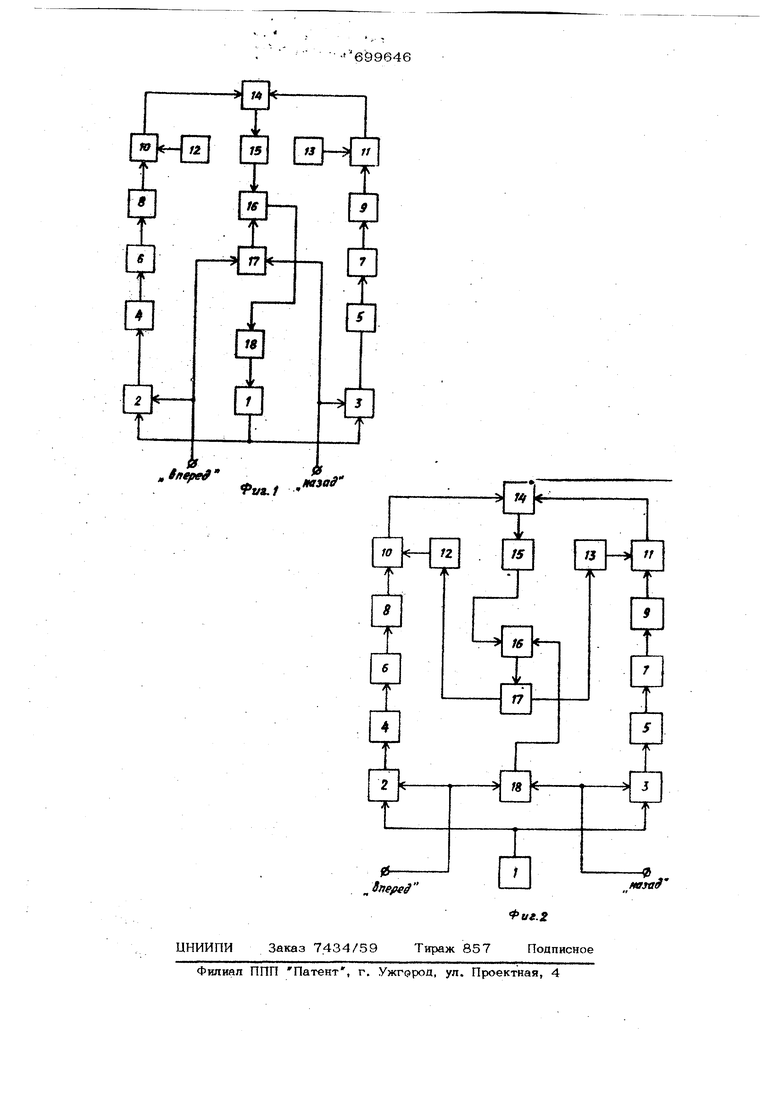
Для этого устройство содержит реверсивный счетчик, элемент сравнения, датчик положения и функциональный преобразователь, вход которого связан с выходом элемента сравнения, соединенного входами с выходами датчика положения и реверсивного счетчика, подключенного своими входами к прямому и обратному входам устройства. Кроме того, выход функционального преобразователя соединен с входом гене ратора импульсов, а прямой и обратный выходы функционального преобразователя соединены соответственно с входами первого и второго выпрямителей. Такое выполнение устройства для управления шаговым двигателем обеспечи вает регулирование электромагнитного момента двигателя, что повышает точность отработки шага и быстродействие привода. На фиг. 1 приведено устройство с ге нератором импульсов регулируемой частоты, структурная схема; на фиг. 2 то же, с нерегулируемым генератором импульсов. Устройство срдержит. генератор 1 им пульсов, смесители 2-3 частоты, делители 4-5 частоты; распределители 6-7 импульсов, блоки 8-9 согласования, инверторы Ю - 11 напряжения, выпрямители 12 - 13, двигатель 14, датчик 15 положения, элемент 16 сравнения, реверсивный счетчик 17 и функциональный преобразователь 18. Устройство работает следующим образом. . В исходном состоянии (при отсутствии импульсов на управляющих входах вперед и назад) импульсы от генератора 1 через смесители 2-3 частоты, делители 4-5 частоты, распределители 6-7 импульсов и блоки 8-9 согласования формируют на выходах инверторов 10 - 11 симметричные многофазные системы напряжений, одноименны гармонические составляющие которых, создающие вращающиеся в одну сторону электромагнитные потоки статора и рото ра, приводят к созданию суммарного ста тического синхронизирующего момента, фиксирующего ротор в точке, зависящей от начального фазового угла сдвига меж ду этими системами напряженийи момен та нагрузки. Рассмотрим работу устройства приме нительно в двухфазной мащ1ше двойного питания с симметричными двухфазнымиобмотками на статоре и роторе, питание которых осуществляется от двух симмет ричных двухфазных систем напряжений прямоугольной формы, вырабатываемых инверторами 1О и 11. При вращении электромагнитных полей обеих обмоток в одном направлении шаг ротора двигателя 14 . «)0 M-Fk где р - число пар полюсов обмоток; К - коэффициент деления делителей 4 И 5 частоты. Кольцевой реверсивный счетчик 17, число разрядов которого равно Л К, обеспечивает регистрацию фазового сдвига между системами питания статора и ротора с дискретностью oCgS.90/K эл. град Число периодов-воспроизведения угла поворота ротора датчиком 15 положения равна р, а дискретность воспроизведения - меньше или равна шагу ротора cL . Элемент 16 сравнения осуществляет операцию алгебраического вычисления разности между показаниями реверсивного счетчика 17, регистрирующего наличие фазового сдвига у между двумя системами питания двигателя 14, и показаниями датчика 15 положения, регист.рирующего отклонение ротора 0 от точки устойчивого положения (нуля кривой синхронизирующего момента). Если величина указанной выше разности отлична от нуля, то на выходе элемента 16 сравнения появляется тсигнал, пропорциональный ей. В случае управления моментом двигателя при помощи изменения частоты питания статора и ротора {фиг. 1), функциональный преобразователь 18 преобразует сигнал рассогласования Г - 0 в сигнал, изменяющий частоту генератора 1 так, чтобы пропорциональная ему частота питания двигателя обеспечила развитие им момента, необходимого для обеспечения заданной величины этого рассогласования (при уменьшении частоты питания Статора и ротора момент двигателя возрастает, а при увеличении - падает). В качестве функционального преобразователя может быть использован интегратор с нелинейным коэффициентом передачи, зависящим от величины сигнала на его выходе. Если сигнал рассогласования меньше заданного, то функ- циональный преобразователь увеличивает частоту генератора 1, обеспечивая тем минимально восзможный момент двигателя при минимуме энергопотреблещя. j69 Электромагнитный момент Двигателя при управлении путем изменения соотношения между величинами напряжений статора и ротора (фиг. 2) может быть запи сан следующим образом: 3Nv- cS T-e f a-N 3 - синхронизирующая составляющая электромагнитного момента;АЛ - демпфирующая составля ющая электромагнитного момента; активная составляющая электромагнитного момента;
4-( U,U, -напряжения питания и активные сопротивления фаз статора и ротора. Из приведенных соотношений следует, что величина активной составляющей элек тромагнитного момента Мд изменяет мо мент двигателя. Соответствующий выбор Мц, обеспечит рассогласование 0 г О. Функциональный-преобразователь 18 в этом случае изменяет соотношение между напряжениями выпрямителей 12 и 13 обеспечивая выполнение условия J-O О. В частном случае, при условии развития двигателем постоянного синхронизирующего момента, сигналы на прямом и обратном выходах функционального преобразователя должны быть пропорциональны (И l/Kq. гце KCJ- величина, зависящая
20 Формула изобретения от величины рассогласовамия (при отсутствии рассогласования и при моменте нагрузки, равном нулю, величина ((д, -1). В качестве функционального преобразователя здесь могут быть использованы два интегратора. Причиной возникновения рассогласования У - 0 может явиться либо изменение управл$пощего воздействия, либо нагрузки на валу двигателя. В обоих случаях устройствоодинаково обеспечивает компенсацшо возникающего рассогласования ротора относительно заданного положения полей статора и ротора, повышая точность работы и быстродействие при-, вода, а также расширяя диапазон рабочих частот. 1.-Устройство для управления шаговым двигателем,.по авт. свид. № 4724Э2, отличающееся тем, что, с целью повышения точности и быстродействия привода, оно содержит реверсивный Счетчик, элемент сравнения, датчик положения и функциональный преобразователь, вход которого связан с выходом элемента сравнения, соедшгенного входами с выходами датчика положенкл и реверсивного счетчика, подключенного своккси входами к прямому и обратному входам устройства. 2.Устройство по п. 1, отличающееся тем, что выход функционального преобразователя соединен со входом генератора импульсов. 3.Устройство по п. 1, отличающееся тем, что прямой и обратный выходы функционального преобразователя соедннены соответственно со входами первого и второго выпрямителей.
«ь
rf
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1982 |
|
SU1045320A1 |
| Устройство для позиционного управления шаговым двигателем | 1979 |
|
SU924816A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
0
fS МЗО
t t/}Lt
