1
Изобретение относится к области автоматики в частности к системам автоматического управления, предназначенным для использования в транспортирующих устройствах.
Известно устройство для автоматического управления 1, содержащее последовательно соединен ные управляющий генератор, сумматор и умножитель . Объект управлен подключен к другому входу сумматора.
Наиболее близким техническим решением .к изобретению является многоканальное устройство для программного управления, содержаще блок задания программы, командное реле и вкаждом канале последовательно соединенные исполнительный элемент, двигатель, датчик тока нагрузки, первый усилитель, первый пороговый элемент, первый элемент задержки, первый триггер, элементы И, второй элемент задержки и второй усилитель, а также последовательно соединенные второй пороговы элемент, третий элемент задержки и второй триггер, инверсный выход которого подключен ко второму вход второго усилителя. Блок задания
программы выдает кратковременные команды на включение и отключение транспортеров При. наличии зйданной .нагрузки эти команды выполняются в рабочем цикле, при отсутствии заданной нагрузки происходит кратковременное .пробное включение, а при наличии аварийной перегрузкиотключение с небольшой задержкой
0 необходимой для отстройки от пусковых токов электродвигателя 2).
Для выполнения кратковременных и длительных команд на включение
5
и отключение транспортеров командное реле соединено непосредственно с исполнительным элементом. Это требует наличия командных триггеров, элемента И и ИЛИ. Кроме того, колебания напряжения питающей сети уносят дополнительную ошибку в значе-. ; ние тока нагрузки электродвигателя, что может привести к ложным включениям, так как при пониженном
5 напряжении ток электродвигателя больше (для одинаковой нагрузки), чем при номинальном напряжении.
Целью изобретения является повьвиение точности программного уст0ройства управления.
Поставленная цель достигается тем, что в каждый; канал устройства введены последовательно соединенные стабилизаторы тока и третий усили : тель, выходом подключенный ко второму входу первого усилителя, а обмотка командного реле подключена к выходу второго усилителя, третий вход которого соединен с управляющим входом, второй вход элемента И подключен к первому выходу блока задания программ, который через размыкающий контакт командного реле соединен со входом исполнительного элемента, а второй выход блока задания nporpaNn M подключен к нулевому входу первого триггера каждого канала.
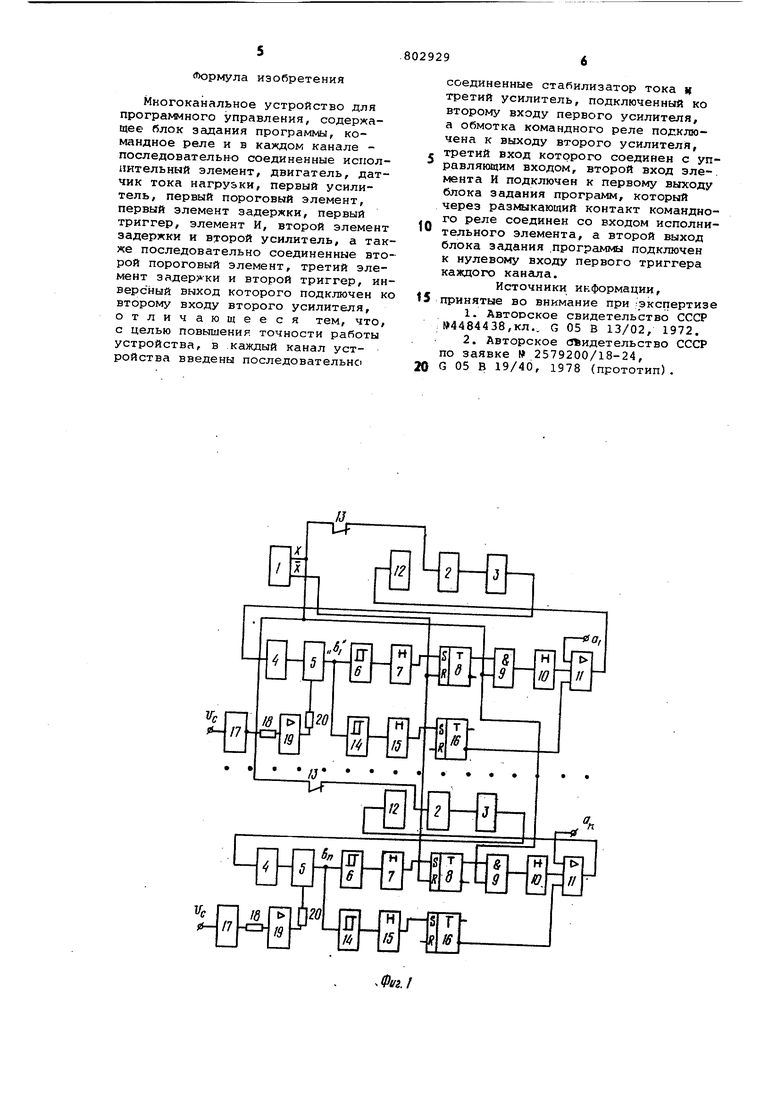
На фиг. 1 изображена функцкон . нальная схема описываемого устройства; на фиг. 2 - схема включения элементов обратной связи по .напряжению.
Многоканальное программное устройство содержит блок задания nporраммы 1, исполнительный элемент 2, электродвигатель 3, датчик тока нагрузки 4, первый усилитель 5, первый пороговый элемент б, первый элемент задержки 7, первый триггер 8, элемент И 9, второй элемент задержки 10, второй усилитель 11, командное реле 12 с размыкающим контактом 13, второй-пороговый элемент 14, третий элемент задержки 15, второй триггер 16, стабилизатор тока 17, входной резистор 18, третий усилитель 19, выходной резистор 20. Триггеры 8 и 16 запоминают нагрузку и перегрузку соответственно.
Устройство работает следуюк1им образом.
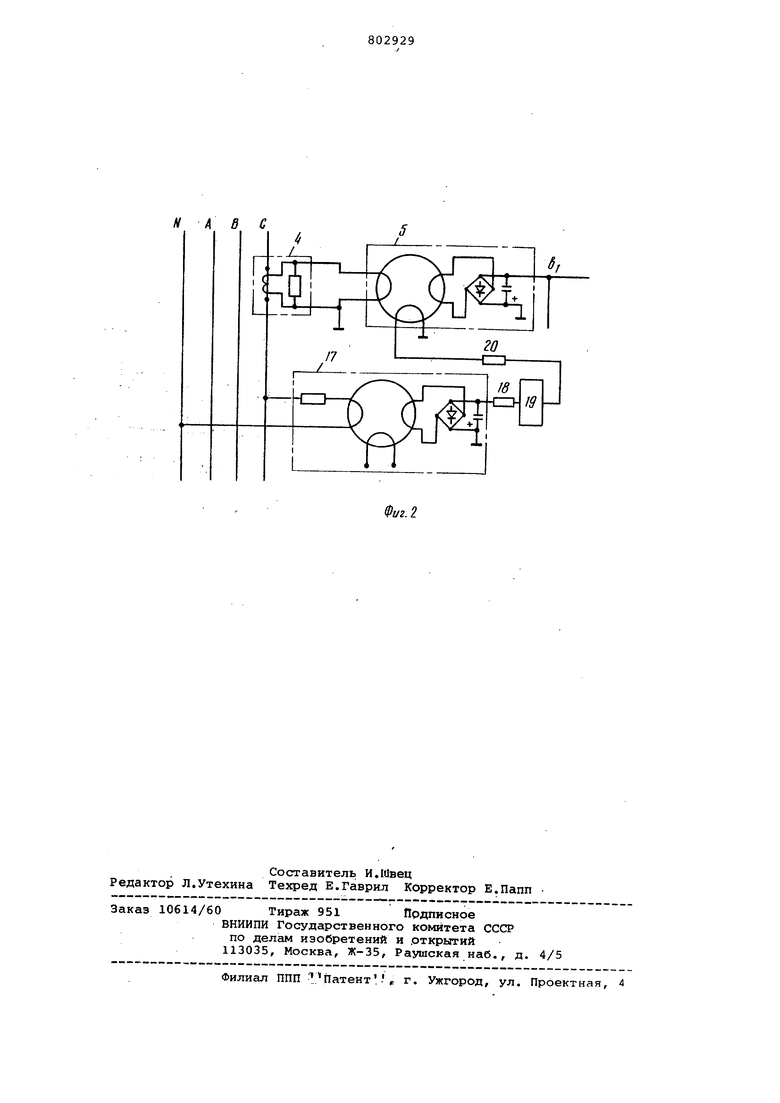
Блок 1 с прямого выхода X выдает команды на включение транспортеров через 0,5 .. 2ч. на 15-25мин соответствующие времени рабочего ; цикла транспортера, а с инверсного выхода Т - те же команды противоположного действия. При наличии команды X включается исполнительны элемент 2, двигатель 3 и на вход перво о усилителя 5 с датчика тока нагрузки 4 поступают сигналы, пропорциональные нагрузке электродвигателя транспортера. Обмотка обратной связи усилителя 5 через выходной резистор 20 присоединена к выходу третьего усилителя 19, вход которого через резистор 18 соедине с выходом согласуюв егс элемента 17 {фиг. 2), вход которого подключен к фазному напряжению питающей сети С помощью резисторов 18 и 20 выбирается рабочая точка усилителя 19 таким образом, чтобы при изменении напряжения сети на + 20% выполнялся линейный закон изменения тока в обмотке обратной связи. Схема
обратной связи (фиг. 2) может быть реализована, например, на элемен|Тах Логика Т (элементы 5, 17-Т-201, а элемент 19-Т-401). Номинальному напряжению сети ( J - 220 В) соответствует номинальный (начальный) ток в обмотке обратной связи, который при повышении напряжения уменьшается, а при снижении увеличивается таким образом, что компенсирует изменение тока и рабочей обмотке усилителя 5, вызванное колебаниями тока нагрузки электродвигателя, обусловленными изменениями напряжения в силовой сети.
С выхода -6 усилителя 5 сигк нал, пропорциональный нагрузке, поступает на входы триггеров РМидт 6 и 14, которые настраиваются на номинальную нагрузку и допустимую перегрузку соответственно. При наличии номинальной нагрузки срабатывает триггер 1тЫидта б и через задержку 7 (уставка задержки времени равна 5 с) срабатывает триггер 8, на прямом выходе которого появляетОзапрещающий включеся сигнал
ние элемента И 9 и соответственно реле 12. Контакт 13 этого реле остается замкнутым и, таким образом, отрабатывается команда, выдаваемая задатчиком программы 1. При отсутствии номинальной нагрузки триггеров 8 не перебрасывается, поэтому на его прямом выходе остается сиг, приводящий к включению
нал
реле 12 через время, заданное элементом задержки 10 (5,5 с). Контакт 13 размыкается и остается разомкнутым на время команды X. После окончания команды X на выходе X появляется сигнал , который возвращает триггер 8 в исходное состояние, а сигнал О на выходе X приводит к появлению О на выходе элемента 9 и к отключению реле 12, которое возвращает контакт 13 в замкнутое положение. При наличии аварийной перегрузки срабатывает триггер 16мидта 14 и через время задержки 15 (1,5 с) перебрасывает триггер 16, срабатывание которого приводит«к включению реле 12, размыканию его контакта 13 -и к отключению электродвигателя транспортера 3. После устранения причины, вызвашией перегрузку транспортера ,триггед 16 возвращается кнопкой (на сгхвмё не, показана) в исходное состояние. При наличии сигналов Q - Ct на входах усилителей 11 осуществляется запрет включения транспортеров (например, во время доения),
. Установка триггеров 8, 16 в исходное положение осуществляется одновременно с включением блока питания (на чертежах не показан).
лормула изобретения
Многоканальное устройство для програкмного управления, содержащее блок задания программы, командное реле и в каждом канале последовательно соединенные исполнительный элемент, двигатель, датчик тока нагрузки, первый усилитель, первый пороговый элемент, первый элемент задержки, первый триггер, элемент И, второй элемент задержки и второй усилитель, а также последовательно соединенные второй пороговый элемент, третий элемент задержки и второй триггер, инверсный выход которого подключен ко второму входу второго усилителя, отличающееся тем, что, с целью повышения точности работы устройства, в каждый канал устройства введены последовательно
соединенные стабилизатор тока ц третий усилитель, подключенный ко второму входу первого усилителя, а обмотка командного реле подключена к выходу второго усилителя, третий вход которого соединен с управляющим входом, второй вход эле-, мента И подключен к первому выходу блока задания программ, который через размыкающий контакт командного реле соединен со входом исполнительного элемента, а второй выход блока задания .программы подключен к нулевому входу первого триггера каждого канала.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР №4484438,кл.. G 05 В 13/02, 1972.
2.Авторское бвидетельство СССР по заявке № 2579200/18-24,
G 05 В 19/40, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство для программного управления | 1978 |
|
SU746432A1 |
| Устройство для защиты трехфазного асинхронного электродвигателя от аварийного режима | 1985 |
|
SU1377955A1 |
| Электропривод переменного тока | 1989 |
|
SU1714782A1 |
| Программный регулятор температуры | 1978 |
|
SU809106A1 |
| Устройство для защиты трехфазного электродвигателя от работы на двух фазах | 1983 |
|
SU1089694A1 |
| Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1986 |
|
SU1335932A1 |
| Способ пуска частотно-управляемого асинхронного электродвигателя | 1988 |
|
SU1534738A2 |
| Устройство для защиты электрической сети от повреждений | 1986 |
|
SU1573497A1 |
| Многодвигательный электропривод | 1980 |
|
SU961082A1 |
| Устройство для переработки вторичных волокнистых материалов | 1982 |
|
SU1071444A1 |