Изобретение относится к области автоматики,к системам автоматического управления, предназначенных для использования в транспортирующих уст ройствах, работающих со случайной нагрузкой в частности,в системах уда ления навоза из животноводческих помещений с применением различных тран спортеров ., Известно устройство для автоматического управления, содержащее после довательно соединенные управляющий генератор, сумматор, умножитель и объект управления, подк.гаоченннй к другому входу сумматора Cl . Известно также многоканальное устройство для nporpeiMMHoro управления 2, содержащее блок задания программы и в каждом канале командно реле, исполнительный элемент (магнитный пускатель) и,объект управления (электродвигатель транспортера) Программное управление эффективно при заданных или заранее известных нагрузках транспортера. В данном случае нагрузка транспортера зависит от большого колич ества факторов, свя занньах с физиологией животных и усло виями их содержания, и является случайной величиной. Поэтому системы программного управления не обеспёчивают оптимальных режимов работы транспортеров, что приводит к снижению их надежности и долговечности в основном из-за возникающих перегрузок . Особенностью навозоуборочного транспортера является то,что режим его работы зависит от момента включения. Наиболее благоприятным моментом включения транспортера будет тот момент, при котором нагрузка равна минальному значению. В этом случае обеспечивается расчетная надежность и долговечность транспортёра. Целью изобретения является р(асширение Функциональных возможностей устройства путем обеспечения оптимальных режимов работы транспортеров. Поставленная цель достигается тем, что многоканальное устройство для программногб управ.г:ения, содержащее блок задания программы и в каждом канале последовательно соёдиненые командное реле,- исполнительный элемент и электродвигатель, в каждом канале последовательно соединенные датчик момента нагрузки, первый усиjrateJib , первый, пороговый элемент, первый элемент задержки, первый триГгер и первый элемент И,последовательо, соединенные второй элемент задержй,второй элемент И, элемент ИЛИ, в орой триггер, третий элемент и и второй усилитель, а также последователБно соединеные второй пороговый элемент, третий элемент задержкии третий триггер, выход которого соеДйЙёй со вторым входом элемента ИЛИ, третий вход которого соединен с выходом перв о элемента И, другой вход KOTOpibro соединен с выходом второго элемёнт.а задержки, выход второго усилителя подключен к входу командного реле, вход второго порогового элемента соединен с выходом первого усилителя, вход датчика момента нагрузки, подключен к электродвигателю, первый выход блока задания программы соединен с другиш входами вторых триггеров каждого канала, а второй - с другими входами вторых элементов И каждого канала.
Йа чертеже изображенопредлагаемЬе устройство.
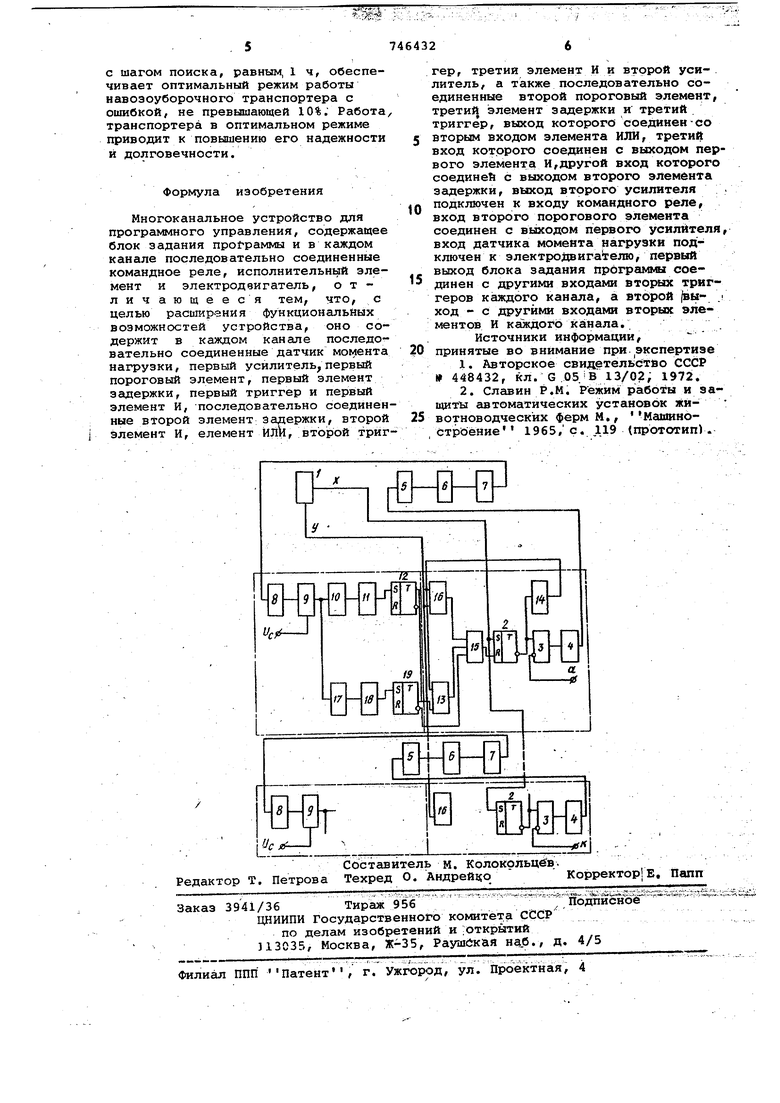
Устройство содержит бЛок 1 задания прграммы, второй триггер 2, третий элемент ИЗ, второй усилитель 4, командное реле 5, исполнительный элемент6, .электродвигатель 7, датчик 8 момента нагрузки, первый усиЛитель 9, первый пороговый элемент 10,первый элемент 11 задержки, первый триггер 12,первый элемент И 13, второй элемент 14 задержки, элемент Или 15, второй элемент И 16, второй пороговый элемент 17, третий элемент 18 задержки и третий триггер 19, причем триггеры 2, 12, 19 запоминают команду, нагрузку и перегрузку соотйетйтвенно.
Уст5)Ьйство работа ет следующим образом.; Л ,.....
Блок I с выхода X выдает команды На вклйчёнйё транспортеров через О,5-2 ч, а с выхода у - команды на О йЛйчёнйё транспортеров через интервалы 16-25 мин, соответствующие времени;рабочего цикла транспортера. При наличии команды х перебрасывается триггер 2, на йыходе которого появляется сигнал , Этот сигнал поступает на входы эл:емента И 3 и элемента 14, с выхода которого через 5,5 р сигнал 1 появляется на входах элементов И13 ,16.При отсут,
0) сигствии запрета (сигнал
нал 1 с выхода: элемента 3 йбдается на вход усилителя 4, который Вкйочает командное реле 5, включающёё исполнительный элемент (магнитный пускатель) 6, который в свою очередь включает электродвигатель 7 -гранспЬртера. v .--:
В это время, включается датчик 8, ко торый ввдает сигнал, пропёрциональ а. нагрузке на вход усилителя 9,
преобразующего переменное напряжение в постоянное. Сигнал постоянного напряжения подается на входы элемен, 10, 17, Элемент 10 срабатывает при сигнале, -соответствующем номинал ному значению нагрузки,а элемент 17 при наличии предельно допустимого значения перегрузки. Предположим, что нагрузка транспортера ниже номинальной. Тогда сигнал на выходе элементов 10 равен О и элемент 11 не перебрасывает триггер 12, с прямого выхода которого сигнал 1 подается на один из входов элемента И 13. На другом входе элемента И 13 сигнал 1уже имеется (с выхода элемента 14), поэтойу на выходе элемента И 13 появляется сигнал , который проходит элемент ИЛИ 15 и сбрасывает триггер 2 в исходное положение. При этом отключаются командное реле 5, элемент 6 и электродвигатель 7. Произошло пробное включение транспортера. Эти пробHbie включения с шагом Поиска заданным блоком 1 продолжаются до тех пор, пока нагрузка транспортера не станет равной номинальному значению В этом случае срабатывают элемент ДО и сигнал () с его выхода через элемент 11 (5 с) перебрасывает триггер 12. На входе элемента И 13 по1
явится сигнал
и на его выходе
О сохранится, т. ё, переключение триггера 2 не произойдет. Транспортер не отключается. Через время рабочего цикла (16-25.мин) на вьаходе у блока 1 появится сигнал , который поступит на второй вход эле. мента И 16. Так как на первом входе Storo элемента уже имеется сигнал 1 (с вьохода элемента 14 ) , то 0 и на его выходе появится .
Этот сигнал через элемент ИЛИ 15 перебросит триггер 2 в исходное по ложенйе, что приведет к отключению электродвигателя. 7. В случае возникновения аварийной перегрузки срабатывает элемент 17 и через время задержки элемента 18 (1,5-2 с) перебросится триггер 19, с выхода коточерез элемент ИЛИ
рого сигнал
15 пройдет йа вход триггера 2 и сбросит его в исходное положение. При этом отключается усилитель 4, командное реле 5, элемент 6 и э.лектродвигатель 7..
Установка триггеров 2, 12, 19 и блока 1 в исходное положение осуществляется одновременно с включением блока питания (на чертеже не показан). .
Предлагаемое устройство осуществляет с помощью пробных включений поиск момента включения транспортера, соответствующего номинальной нагрузке. Тем самым обеспечивают оптимальные режи№л работы транспортеров. Применение предлагаемого устройства ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство для прог-РАММНОгО упРАВлЕНия | 1979 |
|
SU802929A1 |
| Устройство для управления механизмом намотки | 1978 |
|
SU716959A1 |
| Индукционная плавильная установка | 1984 |
|
SU1436285A1 |
| Установка для управления процессом сварки неповоротных стыков труб | 1987 |
|
SU1488149A1 |
| Устройство для управления автоматом-укладчиком силикатного кирпича | 1987 |
|
SU1529178A1 |
| Электропривод переменного тока | 1989 |
|
SU1714782A1 |
| Устройство управления электроприводом транспортера | 1989 |
|
SU1671568A2 |
| Устройство для управления частотно-регулируемым электроприводом | 1985 |
|
SU1309245A1 |
| Устройство управления электроприводом транспортера | 1977 |
|
SU630159A1 |
| Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1986 |
|
SU1335932A1 |
