(54) КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Клиновой механизм свободного хода | 1980 |
|
SU1087714A1 |
| Муфта свободного хода | 1982 |
|
SU1059313A1 |
| Клиновой механизм свободного хода | 1982 |
|
SU1057714A1 |
| Клиновой механизм свободного хода | 1980 |
|
SU935665A1 |
| Клиновой механизм свободного хода | 1983 |
|
SU1160152A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1971 |
|
SU302525A1 |
| Механизм свободного хода | 1986 |
|
SU1425377A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1999 |
|
RU2156897C1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2000 |
|
RU2194199C2 |
| Клиновой механизм свободного хода | 1981 |
|
SU966354A1 |
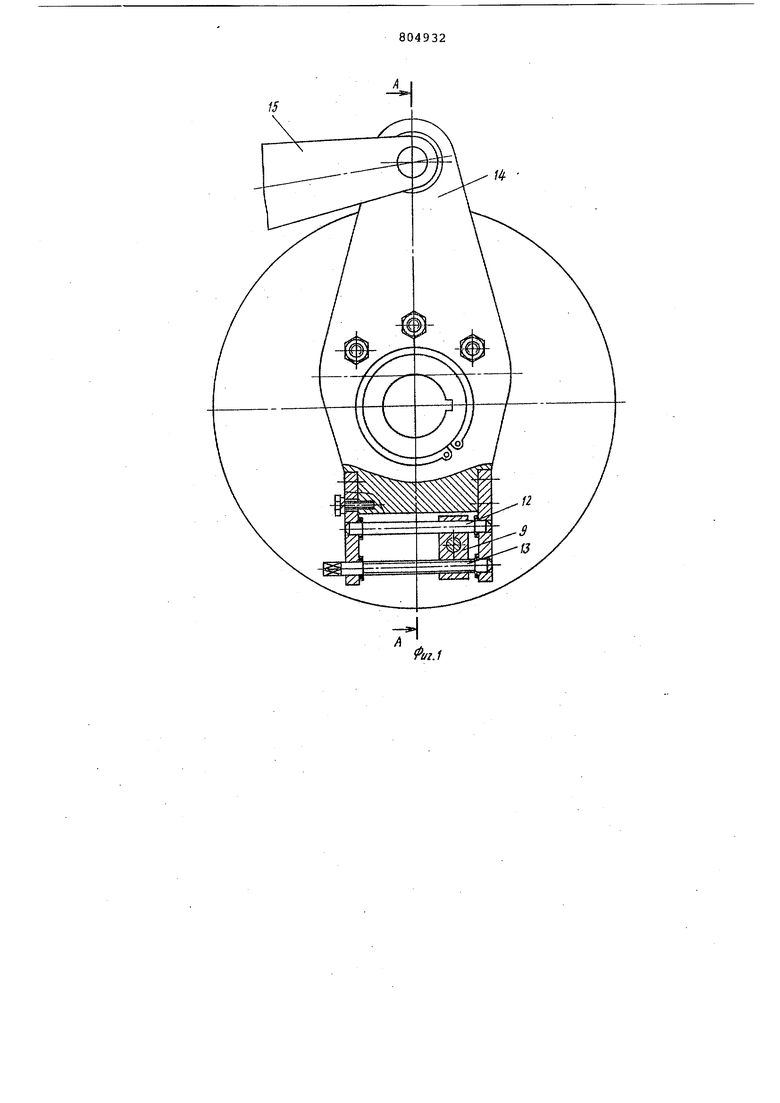
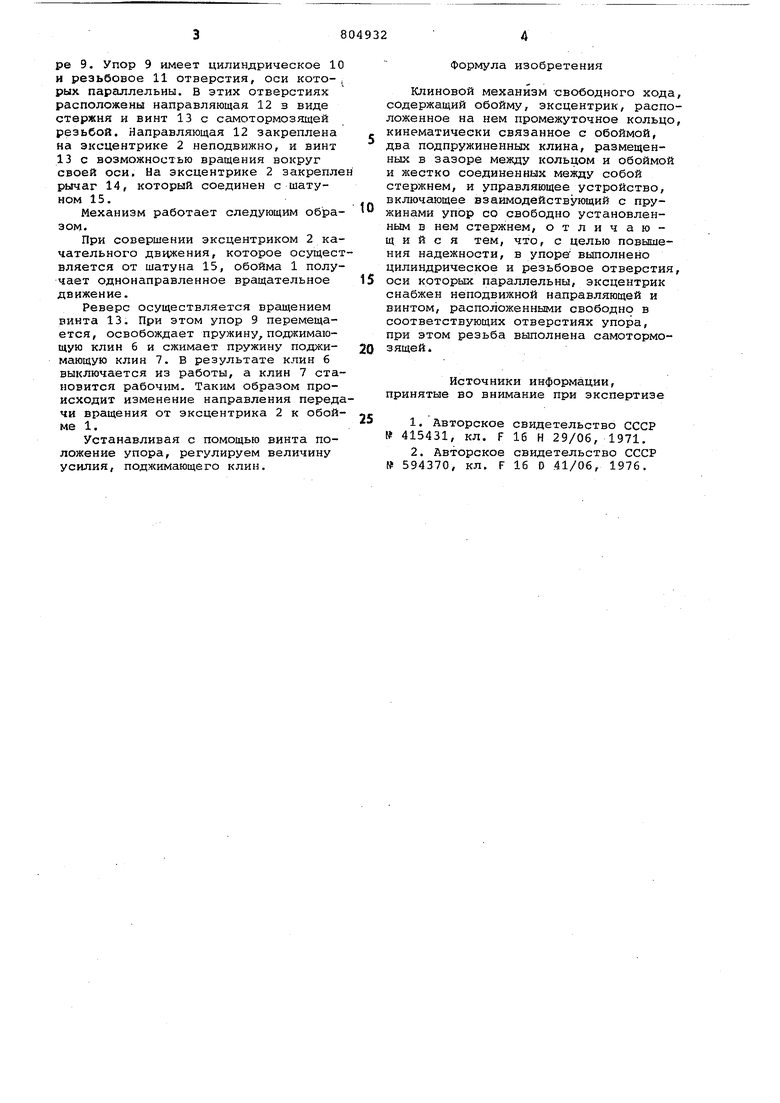
Изобретение относится к машиностроению. Известен клиновой механизм свобод ного хода, содержащий обойму, экс- . центрик, расположенное на нем промежуточное кольцо, кинематически связанное с обоймой, размещенные между обоймой и промежуточным кольцом подпружиненные клинья, дифференциал, втулку, имеющую наружный полукольцевой паз, и управляющее устройство 1 Такой механизм сложен и имеет невысокую надежность. Известен также клиновой механизм свободного хода, содержащий обойму, эксцентрик, расположенное на нем промежуточное кольцо, кинематически связанное с обоймой, два подпружиненных клина, размещенных в зазоре между кольцом и обоймой и жестко сое динеиных между собой стержнем, и управляющее устройство, включающее взаимодействующий с пружинами упор со свободно установленным в нем стержнем 2 j. Однако данный механизм имеет слож ную конструкцию управляющего устройства и недостаточную надежность, так как в этом механизме невозможно осуществлять регулировку усилия пружины, поджимающей клин, что важно для механизмов, работающих с изменяещейся частотой включения. Цель изобретения - повышение нацежности. Поставленная цель достигается тем, что в упоре выполнено цилиндрическое и резьбовое отверстия, оси которых параллельны, эксцентрик снабжен не- . подвижной направлякмцей и винтом, расположенным свободно в соответствующих отверстиях упора, при этом резьба выполнена сгииотормозящей. На фиг. 1 показан предлагаемый клиновой механизм; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2. . Клиновой механизм свободного хода содержит обойму 1 с кольцевым пазом на торцовой поверхности. На ступицу обоймы 1 свободно одет эксцентрик 2 со свободно установленным на нем промежуточным кольцом 3, кинематически связанным пальцем 4 и камнем 5 с обоймой 1. В зазоре, образованном цилиндрическими поверхностями кольца 3 и обоймы 1 находятся два подпружиненных клина 6 и 7, жестко связанные между собой стержнем 8. Стержень 8 свободно расположен в упоре 9, Упор 9 имеет цилиндрическое 10 и резьбовое 11 отверстия, оси кото- , рых параллельны. В этих отверстиях расположены направляющая 12 з виде стержня и винт 13 с самотормозяадей резьбой. Направляющая 12 закреплена на эксцентрике 2 неподвижно, и винт 13 с возможностью вращения вокруг своей оси. На эксцентрике 2 закрепле рычаг 14, который соединен с шатуном 15.
Механизм работает следующим обра зом.
При совершении эксцентриком 2 качательного движения, которое осуществляется от шатуна 15, обойма 1 получает однонаправленное вращательное движение.
Реверс осуществляется вращением винта 13. При этом упор 9 перемещается, освобождает пружину, поджимающую клин 6 и сжимает пружину поджимающую клин 7. В результате клин б выключается из работы, а клин 7 становится рабочим. Таким образом происходит изменение направления передачи вращения от эксцентрика 2 к обойме 1.
Устанавливая с помощью винта положение упора, регулируем величину усилия, поджимающего клин.
Формула изобретения
Клиновой механизм -свободного хода содержащий обойму, эксцентрик, расположенное на нем промежуточное кольцо кинематически связанное с обоймой, два подпружиненных клина, размещенных в зазоре между кольцом и обоймой и лсестко соединенных между собой стержнем, и управляющее устройство, включающее взаимодействующий с пружинами упор со свободно установленным в нем стержнем, отличающийся тем, что, с целью повышения надежности, в упоре выполнено цилиндрическое и резьбовое отверстия оси которых параллельны, эксцентрик снабжен неподвижной направляющей и винтом, расположенными свободно в соответствующих отверстиях упора, при этом резьба выполнена самотормозящей
Источники информации, принятые во внимание при экспертизе
w
Г4
Ю
11
