Изобретение относится к машиностроению и может быть использовано в импульсных бесступенчатых регулируемых механических передачах и других механизмах. Известен клиновой механизм свободного хода, содержащий эксцентрик, расположенное на нем промежуточное кольцо, соединенное с обоймой посредством крестовины, и подпружиненный клин, расположенный между обоймой и промежуточным кольцом 1. Известен также клиновой механизм свободного хода, содержащий обойму, эксцентрик, размещенное на нем промежуточное кольцо, кинематически связанное с обоймой, и подпружиненный относительно эксцентрика клин, контактирующий одной поверхностью с обоймой 2. Такие механизмы имеют больщие габариты при недостаточной нагрузочной способности. Целью изобретения является повышение нагрузочной способности. Поставленная цель достигается тем, что клиновой механизм свободного хода, содержащий обойму, эксцентрик, размещенное на нем промежуточное кольцо, кинематически связанное с обоймой, и подпружиненный относительно эксцентрика клин, контактирующий одной поверхностью с обоймой, снабжен эксцентриковой втулкой, расположенной концентрично промежуточному кольцу, и дополнительным кольцом, кинематически связанным с обоймой и расположенным между клином и эксцентриковой втулкои, при этом эксцентриситет эксцентрика равен сумме эксцентриситетов клина и эксцентриковой втулки, а отношение этих эксцентриситетов определяют из зависимости Кг -2fp-f5() Ч - fp+fj где ti -эксцентриситет эксцентриковой втулки; tz -эксцентриситет клина; fp -коэффициент расклинивания; fj -коэффициент заклинивания. На фиг. 1 показан предлагаемый механизм, осевой разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2. Клиновой механизм свободного хода содержит вал 1, обойму 2 с радиальным пазом 3, эксцентрик 4, шарнирно связанный с приводным устройством в виде шатуна 5, промежуточное кольцо 6, кинематически связанное с обоймой 2 пальцем 7 и надетым на него камнем 8, взаимодействующим со стенками радиального паза 3 обоймы 2. В обойме 2 размещено также кольцо 9, кине.матически связанное с обоймой посредством пальца 10 и надетого на него камня 11, взаимодействующего со стенками радиального паза 3 обоймы 2. Таким образом, кинематическая связь.колец 6 и 9 с обоймой 2 осуществляется посредством кулисного механизма, но может осуществляться и другим образом. Между кольцами 6 и 9 расположена эксцентриковая втулка 12, подпружиненная относительно эксцентрика 4 пружиной 13 через упор 14 и геометрически определяющая положение кольца 9 в механизме. Между кольцом 9 и обоймой 2 размещен клин 15, подпружиненный пружиной 16, опирающейся на упор 17 эксцентрика 4. Механизм работает следующим образом. При повороте эксцентрика 4 против часовой стрелки он давит на промежуточное кольцо 6, перемещению которого в радиальном направлении препятствует эксцентриковая втулка 12. Таким образом, усилие передается на кольцо 9 и затем на клин 15. Клин 15 воздействует на обойму 2, которая воспринимает усилие, создаваемое эксцентриком 4. Весь механизм находится в заклиненном состоянии и вращается как одно целое, передавая движение валу 1. При повороте эксцентрика 4 в направлении часовой стрелки клин 15 и эксцентриковая втулка 12 перемещаются пружинами в освобождающееся клиновое пространство, механизм расклинивается, и вращающий момент на обойму 2 и, следовательно, на валу 1 не передается. Таким образом, при колебаниях эксцентрика 4 от шатуна 5 валу 1 передается вращающий момент только одного направления. Эксцентриситет эксцентрика равен сумме эксцентриситетов клина и эксцентриковой втулки. Отношение этих эксцентриситетов определяют из соотношения Zfp-й() fp+fi - эксцентриситет эксцентриковой втулки; tz -эксцентриситет клина; fp -коэффициент расклинивания; fj -коэффициент заклинивания. При этом считаются, что коэффициенты трения на всех поверхностях одинаковы. При одинаковой нагрузочной способности габариты предлагаемого механизма примерно в 2 раза меньше, чем габариты известных механизмов.
/4-/7
Фиг. 2 Б - Б
Фиг.з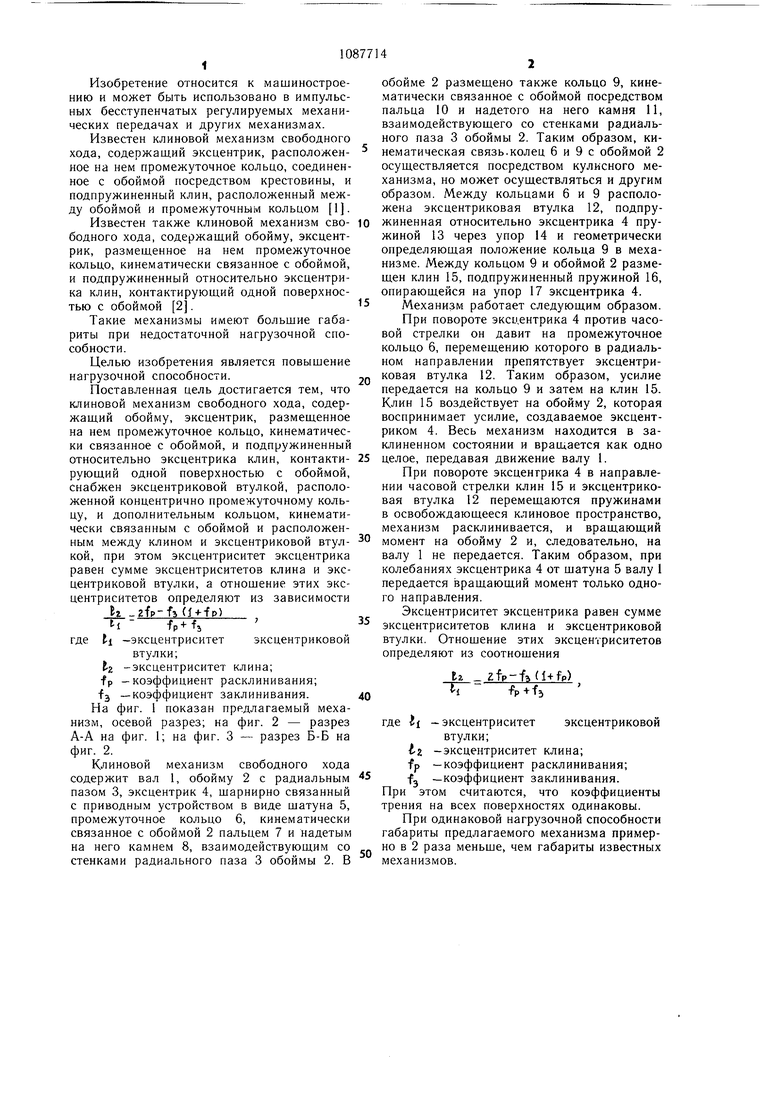
| название | год | авторы | номер документа |
|---|---|---|---|
| Клиновой механизм свободного хода | 1981 |
|
SU1049701A1 |
| Клиновой механизм свободного хода | 1980 |
|
SU962690A1 |
| Клиновой механизм свободного хода | 1974 |
|
SU497431A1 |
| Клиновой механизм свободного хода | 1982 |
|
SU1057714A1 |
| Клиновая муфта свободного хода | 1986 |
|
SU1402734A1 |
| Клиновый механизм свободного хода | 1986 |
|
SU1434179A1 |
| Клиновой механизм свободного хода | 1986 |
|
SU1399541A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2012 |
|
RU2490524C1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2004 |
|
RU2279001C1 |
| Клиновой механизм свободного хода | 1985 |
|
SU1267082A1 |

КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА, содержащий обойму, эксцентрик, размещенное на нем промежуточное кольцо, кинематически связанное с обоймой, и подпружиненный относительно эксцентрика клин, контактирующий одной поверхностью с обоймой, отличающийся тем, что, с целью повыщения нагрузочной способности, он снабжен эксцентриковой втулкой, расположенной концентрично промежуточному кольцу, и дополнительным кольцом, кинематически связанным с обоймой и расположенным между клином и эксцентриковой втулкой, при этом эксцентриситет эксцентрика равен сумме эксцентриситетов клина и эксцентриковой втулки, а отношение этих эксцентриситетов определяют из зависимости tt 2fp-U(i4-fp) ii fp + f. где ti -эксцентриситет эксцентриковой втулки; Ig -эксцентриситет клина; в fp -коэффициент расклинивания; f - коэффициент заклинивания. А Г 00 
| I | |||
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 0 |
|
SU302525A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Клиновой механизм свободного хода | 1974 |
|
SU497431A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
