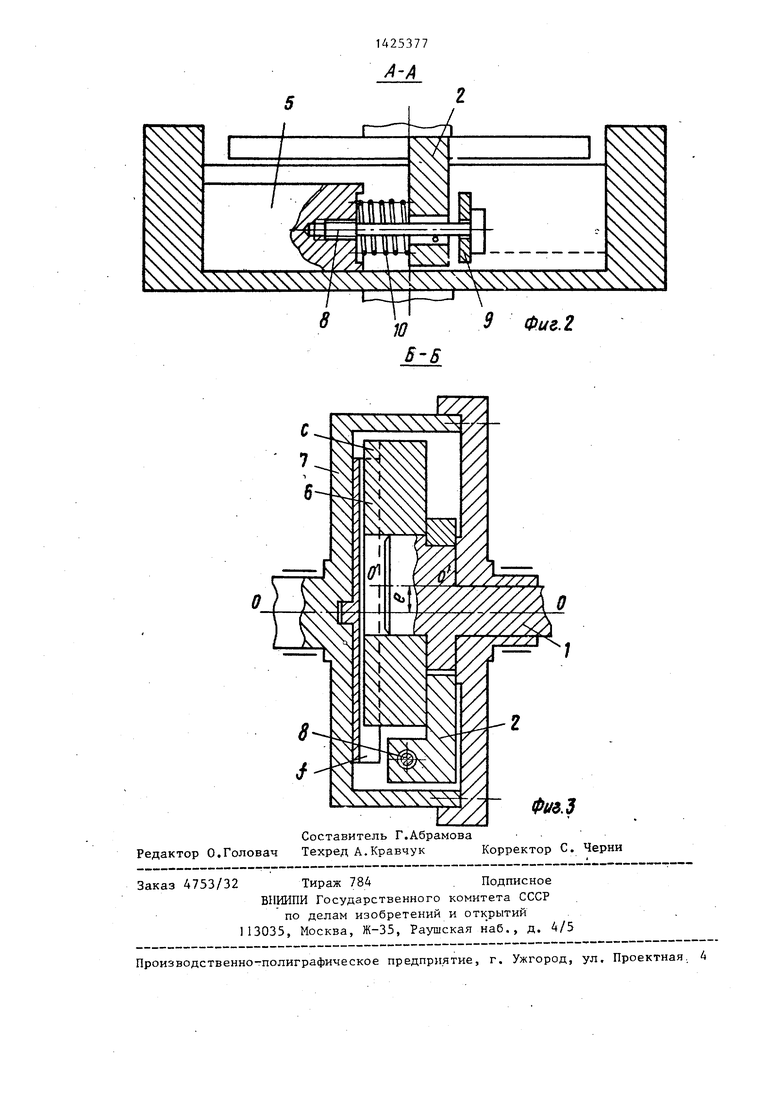
храповое устройство. Клин 5, установ- 20 восстановление силы поджатия пружи- ленный между промежуточным кольцом 6 ны 10. В дальнейшем работа механизма и обоймой 7, связан со стержнем 8, проходящим через отверстие в упоре 2, на конце шайбу 9, ограничива25
свободного хода с автоматическим регулированием усилия поджатия клина повторяется.
кнцую максимальный зазор h между клином 5 и упором 2. Упор 2 по отношению к клину 5 устанавливается так, чтобы компенсировать погрешность изготовле- ния, т.е. пружина 10 должна быть подФормула изобретения
Механизм свободного хода, содержа щий обойму, кинематически связанные
восстановление силы поджатия пружи- ны 10. В дальнейшем работа механизма
свободного хода с автоматическим регулированием усилия поджатия клина повторяется.
Формула изобретения
Механизм свободного хода, содержащий обойму, кинематически связанные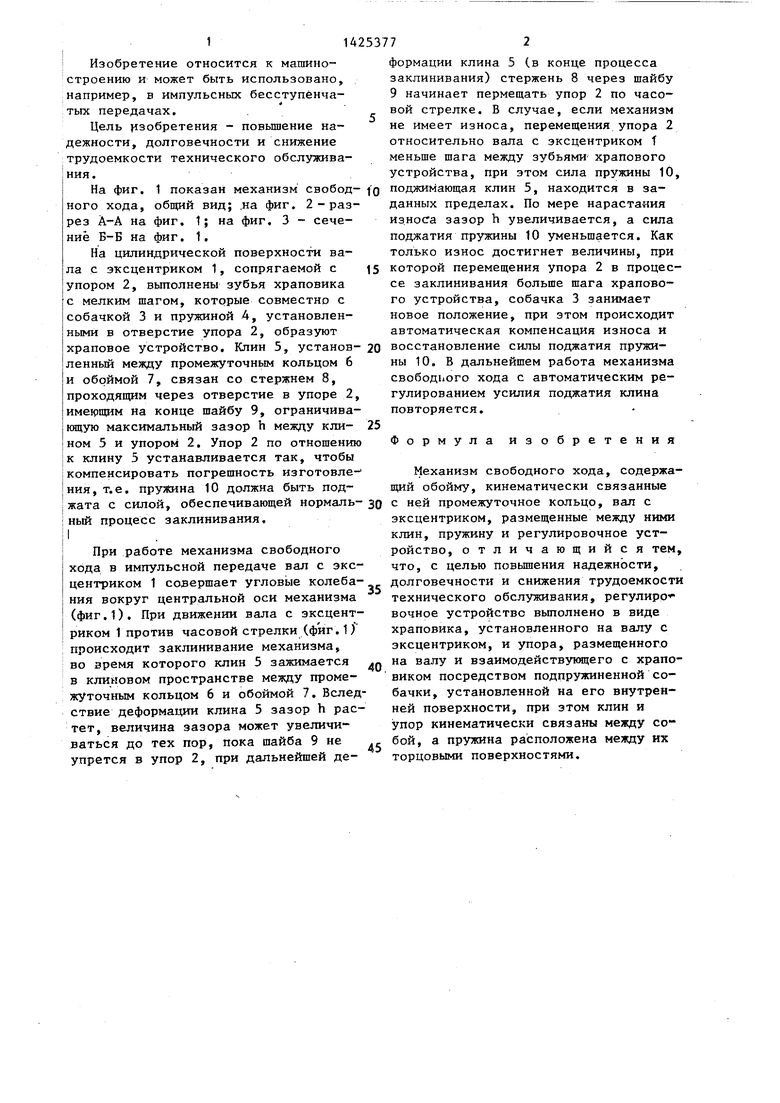
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм свободного хода | 1984 |
|
SU1201579A1 |
| Механизм свободного хода | 1983 |
|
SU1155800A1 |
| Клиновой механизм свободного хода | 1981 |
|
SU1049701A1 |
| КЛИНОВАЯ МУФТА СВОБОДНОГО ХОДА | 2001 |
|
RU2221942C2 |
| Клиновый механизм свободного хода | 1986 |
|
SU1434179A1 |
| Клиновой механизм свободного хода | 1981 |
|
SU966354A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2000 |
|
RU2194199C2 |
| Клиновой механизм свободного хода | 1982 |
|
SU1057714A1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1972 |
|
SU343094A1 |
| Храповой механизм свободного хода | 1989 |
|
SU1723389A1 |
Изобретение относится к области машиностроения и может быть, использовано, например, в импульсных бессту- пендатых передачах. Цель - повышение надежности, долговечности и снижение трудоемкости технического обслуживания . На цилиндрической поверхности вала с эксцентриком 1, сопрягаемой с упором 2, выполнены зубья храповика с мелким шагом, с которым взаимодействует подпружиненная собачка 3. На клине 5 установлен стержень 8, имеющий на конце шайбу, ограничивающую максимальный зазор h между клином и упором 2. Компенсация частичного износа происходит автоматически в конце процесса заклинивания. Стержень 8, связанный с клином через шайбу, перемещает упор 2, который фиксируется собачкой 3 относите тьно вала с эксцентриком 1 в новом положении. 3 ил. СО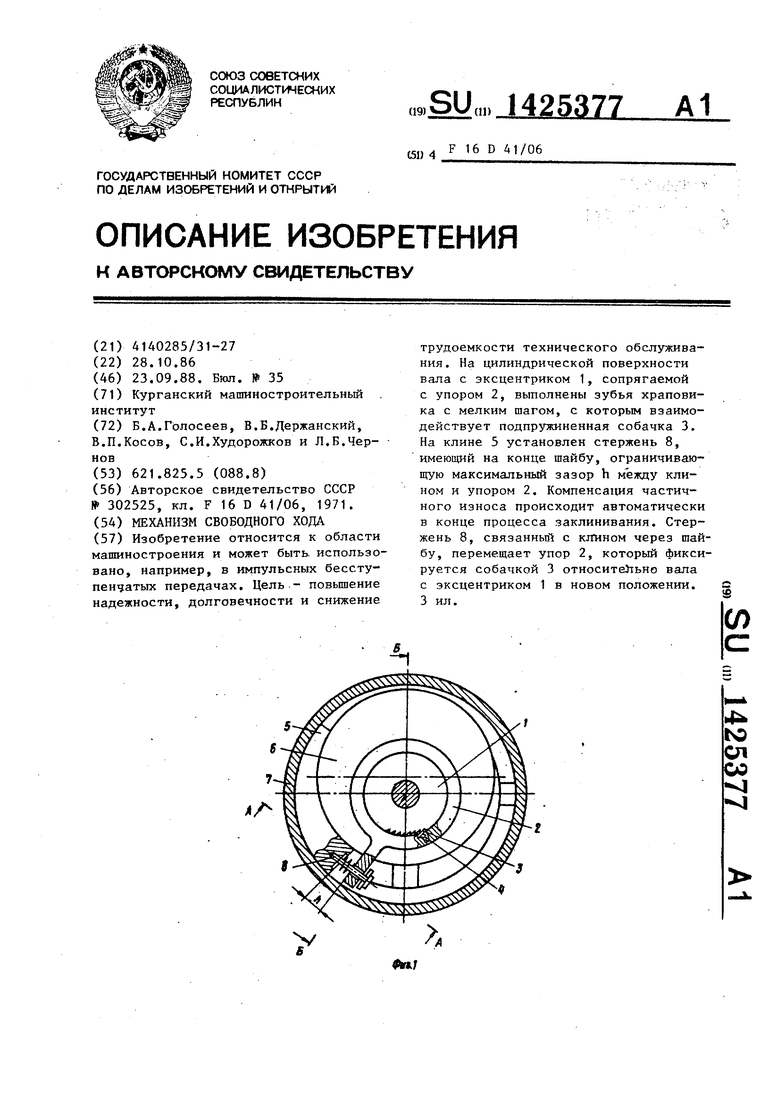
жата с силой, обеспечивающей нормаль- зо с ней промежуточное кольцо, вал с
ный процесс заклинивания. I
При работе механизма свободного хода в импульсной передаче вал с эксцентриком 1 совершает угловые колебания вокруг центральной оси механизма (фиг.1). При движении вала с эксцент- 1 риком 1 против часовой стрелки (фиг. 1) ; происходит заклинивание механизма, во время которого клин 5 зажимается в клиновом пространстве между промежуточным кольцом 6 и обоймой 7. Вследствие деформации клина 5 зазор h растет, величина зазора может увеличи ваться до тех пор, пока шайба 9 не упрется в упор 2, при дальнейшей де
5
-
0
эксцентриком, размещенные между ними клин, пружину и регулировочное устройство, отличающийся тем, что, с целью повышения надежности, долговечности и снижения трудоемкости технического обслуживания, регулиро вочное устройство вьтолнено в виде храповика, установленного на валу с эксцентриком, и упора, размещенного на валу и взаимодействукщего с храповиком посредством подпружиненной собачки, установленной на его внутренней поверхности, при зтом клин и упор кинематически связаны между собой, а пружина расположена между их торцовыми поверхностями.
Фи.Ъ
Составитель Г.Абрамова Редактор О,Головач Техред А.Кравчук Корректор С. Черни
Заказ 4753/32 Тираж 784 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и отк рытий.
113035, Москва, Ж-35, Раушская наб., д. 4/5
«.в««. --
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 2
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 0 |
|
SU302525A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
