(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ
ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ МЕХАНИЗМА ПОДАЧИ
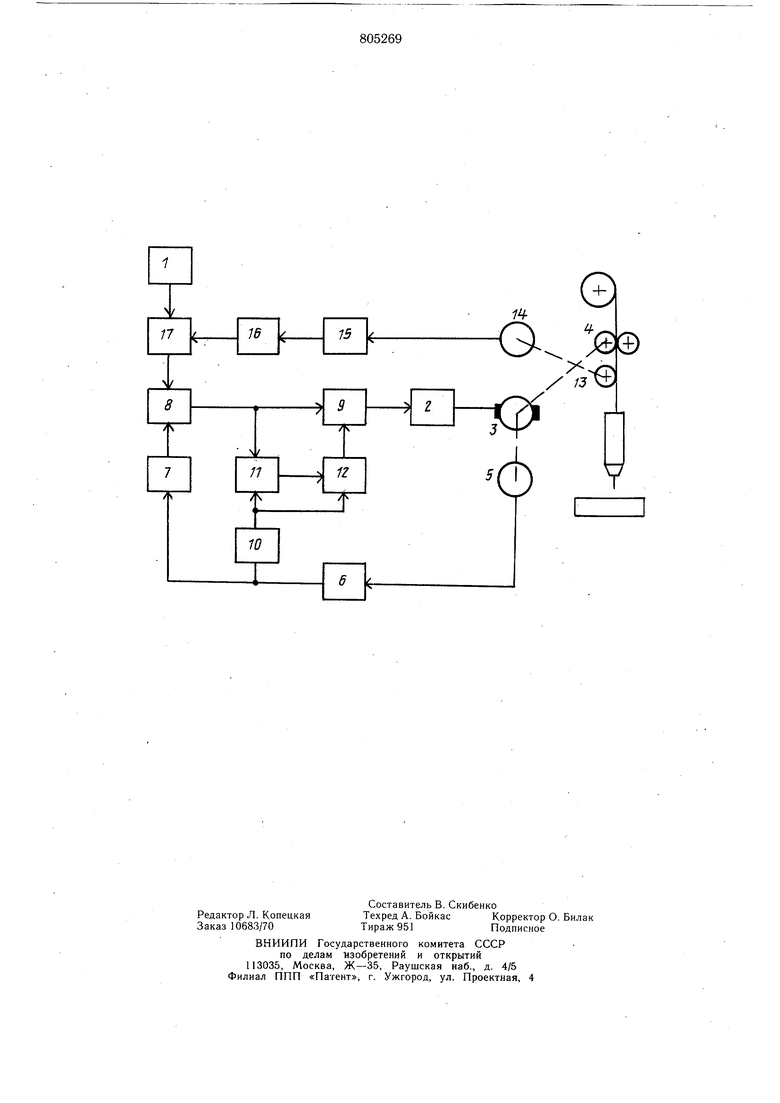
ЭЛЕКТРОДНОЙ ПРОВОЛОКИ мого электродного металла в зону сварки и, слелюзательно, к ухудшению качества сварки. Цель изобретения - повышение точности системы путем компенсации проскальзывания электродной проволоки. Поставленная цель достигается тем, что в систему введены дополнительный ролик механизм-а подачи и последовательно соединенные дополнительные тахогенератор и формирователь импульсов, частотный дискриминатор и сумматор, второй вход которого связан с источником задающего напряжения, а выход- с компаратором, причем дополнительный тахогенератор связан с валом дополнительного ролика механизма подачи. На чертеже приведена функциональная с.хема системы автоматического управления скоростью вращения электродвигателя мех аизма подачи электродной проволоки. Система содержит источник 1 задающего напряжения, последовательно соединенные усилитель 2 мощности, электродвигатель 3, вал которого связан с приводным роликом 4 механизма подачи- электродной проволоки. На валу электродвигателя установлен импульсный тахогенератор 5, который соединен с формирователем 6 прямоугольных импульсов. Выход формирователя 6 прямоугольных импульсов через генератор 7 пилообразного напряжения подключен ко второму входу компаратора 8. Выход компаратора 8 подключен к первому входу электронного реле 9. Выход формирователя 6 прямоугольных импульсов соединен, также с блоком 10 дифференцирования, выход которого связан со вторыми входами триггера 11 управления и логического элемента И 12. Первый вход триггера 11 управления подключен к выходу компаратора 8, а выход - к первому входу логического элемента И 12, выход которого соединен со вторым входом электронного реле 9. Зыход последнего соединен со входом усилителя 2 мощности. Meханиз.м подачи электродной проволоки содержит дополнительный ролик 13 механизма подачи, с валом которого связан дополнительный тахогенератор 14. Выход дополнительного тахогенератора 14 через последовательно соединенные дополнительный формирователь 15 импульсов, частотный дискриминатор 16, который подключен ко второму входу сумматора 17, первый вход которого соединен с источником I задающего напряжения, а выход - с первым входом компаратора 8. Система работает следующим образом. При включении питающих напряжений электродвигатель 3 начинает вращаться, и приводным роликом 4 осуществляется-подача электродной проволоки. На одном валу с двигателем установлен импульсный тахогенератор 5, в качестве которого используется фотоэлектрический датчик. С выхода тахогенератора 5 импульсы тока, частота которых пропорциональна оборотам двигателя и числу отверстий в диске фотодатчика, поступают на вход формирователя 6 прямоугольных импульсов. При поступлении на. вход генератора 7 пилообразного напряжения положительной полуволны прямоугольного напряжения генератор 7 начинает формировать прямой вход пилообразного напряжения. При поступлении отрицательной полуволны прямоугольного напряжения с выхода формирователя 6 прямоугольных импульсов подается иМпульс на обратный ход пилообразного напряжения. Пилообразное напряжение подается на второй вход компаратора 8, на первый вход которого с сумматора 17 поступает суммарный сигнал источника 1 задающего напряжения и частотногр .дискриминатора 16. Величина напрял ения источника 1 задающего напряжения определяет номинальные обороты двигателя для заданной скорости подачи электродной проволоки. При достижении пилообразным напряжением уровня суммарного напряжения компаратор 8 формирует импульс, фиксирующий момент равенства этих напряжений. Этот импульс посупает на первый вход электронного реле 9, которое устанавливается в такое положение, выходной сигнал которого через усилитель 2 мощ-ности обеспечивает постоянное подключение электродвигателя 3 к источнику питания. Прямоугольные импульсы с выхода формирователя 6 импульсов поступают также на блок 10 дифференцирования, на выходе которого формируется последовательность положительных и отрицательных и.мпульсов. Положительные импульсы поступают на второй вход триггера 11 управления, а отрицательные - на второй вход логического элемента И 12. На первый вход триггера 11 управления поступают импульсы с выхода компаратора 8. Выходное напряжение триггера 1 управления имеет прямоугольную форму и поступает на первый вход логического элемента И 12. Выходные импульсы на выходе логического элемента И 12 формируются из отрицательных импульсов блока 10 дифференцирования в том случае, если на первом входе будет отрицательный потенциал., поступающий из триггера 11. В том случае, если скорость электродвигателя 3 меньще номинальной, пилообразное напряжение достигает ровня суммарного напряжения по времени раньше, чем приходит отрицательный импульс блока 10 дифференцирования на второй вход лопгческого элемента И 12. Поэтому раньше появляется импульс на выходе компаратора 8, который устанавливает триггер И в положение, при котором на первый в.ход логического -.(емента И 12 поступает запрещающий потенциал, Импульс на выходе логического элемента И 12 отсутствует. При увеличении скорости уменьшается длительность гг .ло чггсельной и
отрицательной полуволн прямоугольного напряжения тахогенератора 5. При этом уменьшается и амплитуда пилообразного напряжения. При переходе номинальной скорости пилообразное напряжение не достигает уровня суммарного, в связи с чем на выходе компаратора 8 импульс отсутствует. Вследствие этого триггер 11 устанавливается в такое положение, когда на первый вход логического элемента И 12 поступает разрешающий потенциал. Логический элемент И 12 из отрицательных импульсов блока 10 дифференцирования формирует импульсы, которые поступают на второй вход электронного реле 9. Электронное реле 9 отключает электродвигатель 3. Скорость вращения двигателя падает, а положительные и отрицательные полуволны прямоугольноТо напряжения увеличиваются. Амплитуда пилообразного напряжения возрастает до уровня суммарного, и компаратор формирует импульс, который подключает электродвигатель 3 через электронное реле 9 и уси
литель мощности 2. В дальнейшем работа системы заключается в попеременном подключении и отключении двигателя от источника питания, в результате чего стабилизируется скорость вращения подающих роликов 4 механизма подачи. Электродная проволока подается в зону сварки. Дополнительный ролик 13 механизма подачи вращается с определенной скоростью, которая определяется его диаметром и скоростью движения электродной проволоки. С валом дополнительного ролика 13 механизма подачи связан дополнительный тахогенератор 14, на выходе которого формируются импульсы тока, частота которых пропорциональна оборотам дополнительного ролика 13 механизма подачи и числу отверстий в диске фотодатчика. Импульсы тока поступают на вход дополнительного формирователя 15 импульсов. Сформированные импульсы подаются на вход, частотного дискриминатора 16, на выходе которого формируется постоянное напряжение, поступающее ka второй вход сумматора 17. При наличии возмущений в направляющем канале возникает проскальзывание электродной проволоки, в результате чего скорость ее движения уменьщается. Это приводит к уменьшению скоростей вращения дополнительного ролика 13 механизма подачи и дополнительного тахогенератора 14. Частота импульсов тахогенератора 14 уменьшается, что приводит также к уменьшению постоянного напряжения на выходе частотного дискриминатора 16. суммарное напряжение на выходе сумматора 17 также уменьшается, что приводит к увеличению скорости вращения подающих роликов и соответственно к увеличению скорости движения электродной проволоки.
Введение перечисленных элементов позволяет измерять фактическую скорость движения электродной проволоки на выходе из механизма подачи и управлять скоростью вращения подающих роликов в соответствии с требуемой скоростью движения проволоки. В результате стабилизируется количество вводимого электродного металла в зону сварки и улучшается качество сварки.
Формула изобретения
Система автоматического управления скоростью вращения электродвигателя механизма подачи электродной проволоки по авт. св. № 693346, отличающаяся тем, что, с целью повышения точности системы, в нее введены дополнительный ролик механизма подачи и последовательно соединенные дополнительные тахогенератор и формирователь импульсов, частотный дискриминатор и сумматор, второй вход которого связан с источником задающего напряжения, а выход - с компаратором, причем дополнительный тахогенератор связан с валом дополнительного ролика механизма подачи.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 693346, кл. G 05 D 13/10, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления скоростью вращения электродвигателя механизма подачи электродной проволоки | 1977 |
|
SU693346A1 |
| Система автоматического управления скоростью вращения электродвигателя механизма подачи электронной проволоки | 1988 |
|
SU1603349A2 |
| Устройство управления дуговой сваркой | 1987 |
|
SU1505705A1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
| Устройство для измерения вертикальных профилей гидрологических параметров морской воды | 1980 |
|
SU935769A1 |
| Устройство стабилизации скорости электродвигателя постоянного тока | 1972 |
|
SU521643A2 |
| Устройство для синхронизации сигналов воспроизведения цифровой информации | 1986 |
|
SU1462413A1 |
| Электропривод постоянного тока | 1986 |
|
SU1661951A1 |
| Устройство для стабилизации скорости движения магнитного носителя | 1983 |
|
SU1137522A1 |
| Устройство для ультразвукового контроля движущихся изделий | 1985 |
|
SU1270685A1 |