1
Изобретение относится к управлению и регулированию и предназначено для управления виброиспытаниями объектов с применением вычислительных устройств.
Известно устройство для управления испытаниями изделий на случайные вибрации, содержащее многоканальную замкнутую систему управления, блок промежуточной памяти и переключатель С И
Недостатками этого устройства яв-. ляются низкое быстродействие и невысокая точность воспроизведения вибрационного состояния объекта.
Наиболее близким к предлагаемому техническим решением является устройство для управления вибростендом, содержащее последовательно соединенные блок вычисления вибрационных характеристик и блок сравнения, связанный со входом вибростенда с объектом, а также датчик вибрации объекта, выход которого подключен к первому входу блока вычисления вибрационных характеристик, второй вход которого соединен со вторым входом блока сравнения, к выходу датчика вибрации вибростенда и через блок вычисления матрицы - с первьм
входом блока вычисления сигнала управления, второй вход которого подключен к выходу блока вычисления вибрационных характеристик и входу блока записи, выход которого через усилитель соединен с третьим входом блока сравнения, второй вход усилителя соединен с выходстл блока вычисления сигнала управления и с
10 третьим входом блока вычисления вибрационных характеристик Г2.
Цель изобретения - упрощение устройства. Поставленная цель достигается тем, что в устройстве для управления вибростендом второй вход :и выход блока вычисления матрицы подключены соответственно к выходу и четвертому входу блока вычисления
20 вибрационных характеристик.
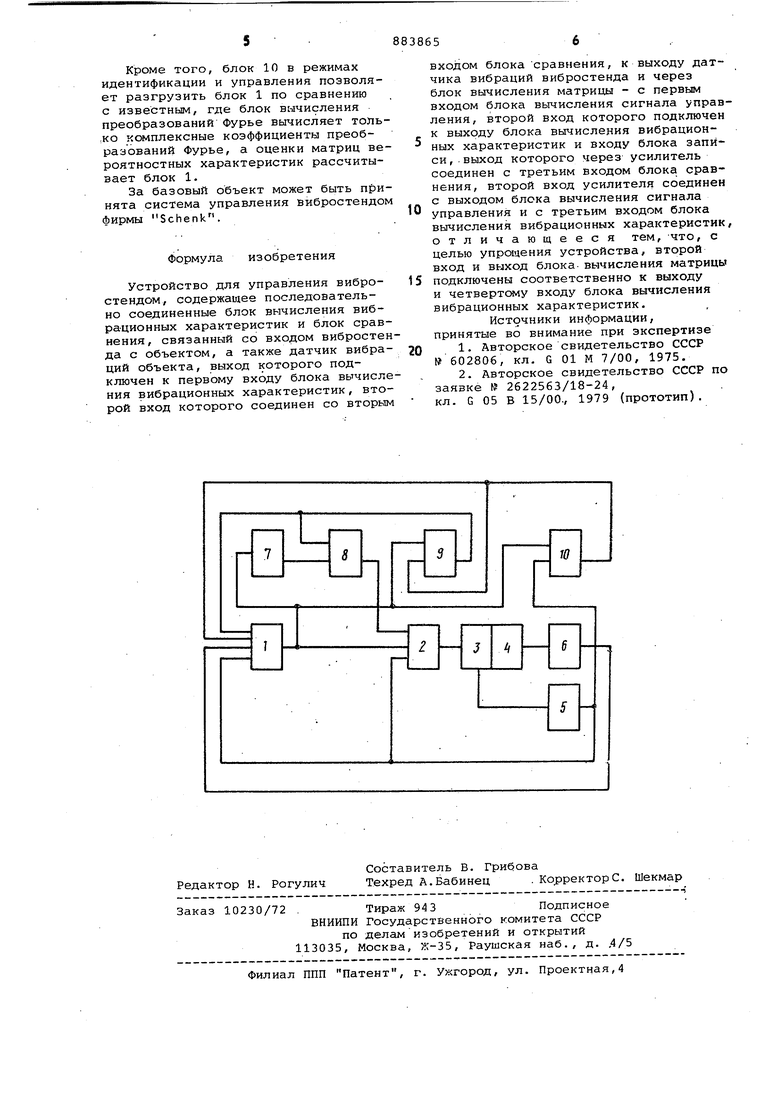
На чертеже представлена блок-схема предлагаемого устройства.
Устройство содержит блок 1 вычисления вибрационных характеристик,
25 блок 2 сравнения,вибростенд 3,объект 4 испытаний, первый датчик 5 вибраций, второй датчик 6 вибраций, о.Ок 7 записи и воспроизведения сигнала, усилитель 8, блок 9 вычисления
30 сигнала управления и блок 10 вычисления матрицы вероятностных характерис тик, например ЭВМ Электроника-бО. Устройство работает следующим образом. Функционирование устройства включает в себя-три режима: идентификации, управления и виброиспытаний. В режиме идентификации, целью которого является получение матриц передаточных функций вибростенда 3 и объекта 4, блок 1 с применением блока 10 формирует скалярный случайный процесс и через блок 2 сравнения последовательно подает его на вибростенд 3. Блок 2. сравнения,вибростенд 3 и первый датчик 5 вибраций образую нормальный сервогидравлический регулировочный контур, обеспечивающий соответствуюгцее перемещение рабочего стола вибростенда 3. Назначение этог контура регулирования в остальных режимах работы аналогично. Реакция вибростенда 3 и объекта 4 которая представляет собой выходные сигналы первого 5 и второго 6 датчиков вибраций соответственно,поступает в блок 1, который с помощью блока 10 вычисляет искомые матрицы передаточных функций. Последние являются исходным параметром для режима управления, который служитдля выработки управляющих воздействий на входе вибростенда 3 при достижеНИИ заданной точности совпадения матрицы вероятностных характеристик реакции вибростенда 3 с эталонной. Эталонную матрицу определяет блок 1 по заданной матрице вероятностных характеристик выходного сигнала объ екта 4 испытаний, ра.ссчитанной по данным, эксплуатации, и полученной в режиме идентификации матрице его передаточных функций. В качестве заданной матрицы можно использовать например, матрицу спектральных плот ностей. В режиме управления, используя математическую модель, отражающую зависимость между матрицей вероятностных характеристик реакции вибро стенда 3 и управляемь 1и параметрами его входного сигнала, блок 1 с применением блока 10 формирует по эталонной матрице вероятностных характеристик случайный процесс вибраций x(t) и через блок 2 сравнения подае его на вибростенд 3. Реакция вибростенда 3 y{t) с выхода первого датчика 5 вибраций поступает в блок 1 Блок 1 с применением блбка 10 вычис ляет оценки соответствующих вероят ностных характеристик, сравнивает и с эталонными и вычисляет вектороши бок , к которому применяют итерацион ный алгоритм коррекции параметров случайного процесса вибраций х(t). По скорректированному вектору уп равляемых параметров блок 1 формирует новый случайный процесс вибраций x(t) и через блок 2 сравнения подает его на вибростенд 3. Выполнение итераций производится до тех пор, пока не выполнены условия соответствия матрицы вероятностных характеристик процесса y(t) эталонной.Если после- нулевой итерации вектор ошибок не превышает допустимой величины, коррекцию параметров случайного процесса вибраций x(t) не проводят. В заключение режима управления блок 1 записывает сформированный сигнал управляющих воздействий в блок 7,а эталонную матрицу вероятностных характеристик - в блок 9 вычисления. сигнала управлен-ия. В режиме виброиспытаний блок 7 подает сформированный сигнал вибраций x(t) через усилитель 8 и блок 2 сравнения на вибростенд 3. Сигнал реакции вибростенда 3поступает с выхода первого датчика 5 вибраций на вход блока 10,где вычисляют матрицу его вероятностных характеристик. Элементы последней в блоке 9 вычисления сигнала управления вычитают из соответствующих элементов эталонной матрицы и по результирующему вектору ошибок формируют сигнал управления, который поступает на вход усилителя 8, изменяя соответствующим образом амплитуду сигнала вибраций. Одновременно в блоке 9 формируют критерий останова, характеризующий степень соответствия вычисленной в блоке 10 матрицы вероятностных характеристик эталонной. Если полученный критерий останова превышает допустимое значение, с выхода блока 9 в блок 1 поступает соответствующий сигнал и устройство переводится- в режим идентификации, а затем управления. По окончании режима управления блок 1 перезаписывает вновь сформированный сигнал управляющих воздействий x(t) в блок 7 записи и воспроизведения сигнала и возвращает устройство в режим виброиспытаний. Сигналы с контролируемых точек объекта 4, регистрируемых вторым датчиком б вибраций поступают в блок 1, который совместно с блоком 10, прерывающим на требуемое время обработку информации с первого дат- чика5 вибраций, обрабатывают данные испытаний. Время проведения виброиспытаний задает таймер блока 1 Остановка работы устройства oc iществляется с пульта блока 1. Применение предлагаемого устройства позволяет снизить затраты примерно на 60 тыс.руб. по сравнению с известным за счет исключения блока вычисления преобразований Фурье. Качество контроля испытаний при этом п акт1 чески не снижается, поскольку обращение к блоку 10 при обработке информации с контролируемых точек объекта происходит эпизодически.
Кроме того, блок 10 в режимах идентификации и управления позволяет разгрузить блок 1 по сравнению с известным, где блок вычисления преобразований Фурье вычисляет толь.ко комплексные коэффициенты преобразований Фурье, а оценки матриц вероятностных характеристик рассчитывает блок 1.
За базовый объект может быть пркнята система управления вибростендом фирмы Schenk.
Формула изобретения
Устройство для управления вибростендом, содержащее последовательно соединенные блок вычисления вибрационных характеристик и блок сравнения, связанный со входом вибростенда с объектом, а также датчик вибраций объекта, выход которого подключен к первому входу блока вычисления вибрационных характеристик, второй вход которого соединен со вторым
входом блока сравнения, к выходу датчика вибраций вибростенда и через блок вычисления матрицы - с первым входом блока вычисления сигнала управления, второй вход которого подключен к выходу блока вычисления вибрационных характеристик и входу блока записи, .выход которого через усилитель соединен с третьим входом блока сравнения, второй вход усилителя соединен с выходом блока вычисления сигнала управления и с третьим входом блока вычисления вибрационных характеристик, отличающееся тем, -что, с целью упрощения устройства, второй вход и выход блока вычисления матрицы подключены соответственно к выходу
5 и четвертому входу блока вычисления вибрационных характеристик.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
0 №602806, кл. G 01 М 7/00, 1975.
2.Авторское свидетельство СССР по заявке № 2622563/18-24,
кл. G 05 В 15/00., 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вибро-СТЕНдОМ | 1978 |
|
SU807208A1 |
| Устройство для управления динамическими испытаниями | 1986 |
|
SU1361504A1 |
| СПОСОБ ВИБРОИСПЫТАНИЙ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2729980C1 |
| СПОСОБ ВИБРОИСПЫТАНИЙ ОБЪЕКТА НА ЭЛЕКТРОДИНАМИЧЕСКОМ ВИБРОСТЕНДЕ | 2022 |
|
RU2784480C1 |
| Устройство для моделирования широкополосных случайных вибрационных процессов | 1987 |
|
SU1513469A1 |
| Устройство для управления виброиспытаниями | 1985 |
|
SU1267377A1 |
| СПОСОБ ВИБРАЦИОННЫХ ИСПЫТАНИЙ ОБЪЕКТОВ | 1990 |
|
RU1773164C |
| Устройство для защиты электродинамического вибростенда с блоком задания требуемого характера вибрации и усилителем мощности от перегрузок по току в цепи подвижной катушки | 1985 |
|
SU1339724A2 |
| Система управления вибростендом | 1979 |
|
SU840803A2 |
| Система управления вибростендом | 1979 |
|
SU824144A2 |
