Изобретение относится к автомати ке и может быть использовано для программного управления положением различных производственных,механизмов , Известна позиционная система, которая содержит последовательно соединенные.элемент сравнения, сумматор, релейный элемент, исполни тельный двигатель, с выходным валом которого связаны тахогенератор и нагрузка с закрепленным на ней датчиком обратной связи, причем выход тахогенератора.связан с входом сумматора через нелинейный преобразователь,, а выход датчика об ратной связи присоединен к входу элемента сравнения tilОднако такая система характеризу ется сложностью настройки и большой чувствительностью к изменению параметров . Известна также система управлени содержсццая последовательно соединенные элемент сравнения, релейный элемент, блок умножения и двигатель который через редуктор соединен с элементом сравнения, релейный элемент, блок умножения и двигатель/ который через редуктор соединен с элементом сравнения, нелинейный элемент, тахогенератор, установленный на валу двигателя, реле реверса, вход которого подключен к выходу элемента сравнения, а выход к входЗ блока умножения, выпрямитель, подключенный к тахогенератору, реле и второй блок умножения, первый вход которого соединен через нелинейный элемент, с выпрямителем, а второй через реле связан с выходом элемента сравнения, причем выход второго блока умножения подключен к втррокв входу реле реверса 2, Однако данное устройство отличается сложностью конструкции, Наиболее близкой по технической сущности к предлагаемому.является система программного управления, содержеицая последовательно соединенный блок управления, блок сравнения, преобразователь, код-аналог,компаратор, переключатель, привод и датчик обратной связи, выход которого подключен к другому входу блока сравнения, последовательно соединенные сумматор, вычитатель,блок совпсщения и триггер, выход которого присоединен к второму входу переключателя, второй вход триггера соединен с выходом блока управления счетный вход вычитателя подключен к генератору импульсов, второй вход компаратора через датчик скорости соединен с выходом исполнительного привода, входы сумматора соединены с выходами блока сравнения и компаратора, а у.становочные входы вычитателя присоединены к выходу блока сравнения З..
Недостатком этой системы является невысокое быстродействие.Это объясняется тем, что заключительный участок переходного процесса протекает в скользящем режиме.
Цель изобретения - повышение быстродействия систелщ за счет сокращения длины участка скользящего режима.
Цель достигается тем, что систем прозграммного управления, содержащая генератрр импульсов, последовательно соединенные блок управления, блок сравнения, преобразователь коданалог, компаратор, переключатель, привод и датчик обратной связи, вых которого подключен к другому входу блока сравнения, а также, последовательно соединенные первый сумматор, вычитатель, блок совпадения и триггер, выход которого подключен к вто рому входу переключателя, а второй вход - к выходу блока управления, второй вход компаратора через датчик скорости соединен с выходом привода, входы первого сумматора подключены к выходам блока сравнения и компаратора, а установочные входы вычитателя связаны с выходом блока сравнения, содержит постоянное запомингисядее устройство и последовательно соединенные регистр ошибки, второй сумматор и делитель частоты, счетным входом подключенный к выход генератора импульсов, а выходом - к 1:четнокбг входу вычитателя, установочные входы регистра ошибки соединены с выходом блока сравнения, выход постоянного запоминающего устройства - с вторым входом второго сумматора, а управляющий вход регихгтра сяиибки - с выходом первого сум матора.
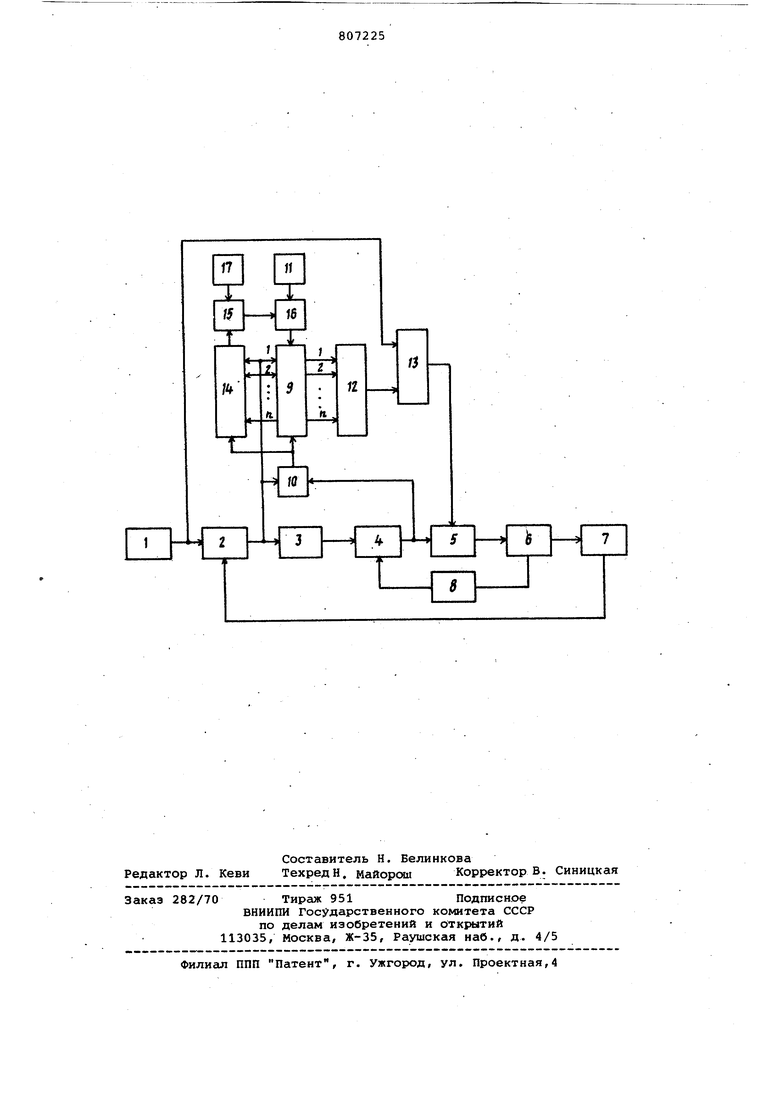
На чертеже представлена блок-схема систелфа.
Система содержит блок 1 управлени, блок 2 сравнения, преобразователь 3 код-аналог, компаратор 4, переключатель 5, привод б, датчик 7 обратной связи, датчик 8 скорости , вычитатель 9, первый сукматор 10 (по модулю два), генератор 11 импульсов, блок 12 совпадения, триг гер 13, регистр 14 ошибки, второй сумматор 15, делитель 16 частоты и постоянное запоминающее устройство
Рассмотрим функции, выполняемые отд зльными структурными элементами
системы. Блок 1 вЬвдает код перемещения, которое необходимо отработать, и устанавливает в 1 триггер 13. Блок 2 определяет разность между заданным и действительным знчением регулируемой координаты.Преобразователь 3 преобразует код этой разности в аналоговый сигнал. Компаратор 4 сравнивает сигналы ошибки и отрицательной обратной связи по . скорости, поступающей с выхода датчика 8. Переключатель 5 подает на привод б управляющее воздействие .требуемого знака. Привод б изменяет значение регулируемой величины, значение которой измеряется датчиком 7. Вычитатель 9 служит для запоминания кода сшибки в момент, определенный сумматором 10 и вычитания из него импульсов, поступающих от генератора.11 через делитель 16 Регистр 14, сумматор 15, делитель 16 и устройство 17 служат для деления частоты импульсов, поступающих от генератора 11, на число алгебраической суммы содержимых регистра 14 и устройства 17. Блок 12 определяет момент, когда содержимое вычитателя 9 станет равным нулю и устанавливает в О триггер 13, что соответствует разрешению на переключение переключателя 5. Состояние 1 триггера 13 запрещает переключение переключателя 5.
Система работает следующим образ ом.
В начальный момент триггер 13 установлен в О, а входные величины сукиатора 10 имеют разные знаки поэтоь вычитатель 9 и регистр 14 работают в режиме установки начального значения. Блок 1 вьщает сигнал на установку в 1 триггера 13 с небольшой задержкой, поэтому переключатель 5 принимает состбяние, соответствующее знаку начальной ошибки.
В момент изменения знака на выходе компаратора 4 выходная величина сумматора 10 переключает вычитатель 9 из режима установки начального значения в режим вычитания. Одновременно на управляющем входе регистра 14 появляется сигнеш, переключакщий его в режим хранения записанной величины. На счетный вход вычитателя 9 поступают импульсы с выхода делителя 16. Частота этих импульсов равна частоте генератора 11 деленной на алгебраическую сумму ошибки, хранящейся в регистре 14, и постоянной величины, хранящейся в устройстве 17.Когда содержимое вычитателя 9 станет равным нулю, сигнал с блока 12 установит триггер 13 в О. На переключатель 5 поступает- сигнал разрешения переключения и управляющее воздействие изменяет свой знак на противоположный., в дальнейшем триггер 13 не влияет на работу переключателя 5. Подбором частоты следования импульсов генератора 11 и значения числа, хранящегося .в устройстве 17, нетрудно добиться, чтобы длительности первого и второго интервалов управления незначительно отличались от значений, соответствующих оптимальному по быстродействию управлению, а небольшой заключительный.участок переходного процесса проходил в скользящем режиме. Это обеспечивает высокое быст родействие в сочетании с отсутствие перерегулирования и плавным подходо нагрузки к заданно положению. Введение в систему, новых элементов: регистра етяибки, сумматора, де лителя частоты и постоянного запоминающего устройства позволило значительно повысить быстродействие системы. Это объясняется тем, что в предлагаемой системе зависимость времени обнуления вычитателя от оши ки в момент, определяемый сумматоро 10, имеет вид полинома второй степени (а не линейной функции, как в известном устройстве).Поэтому точ ность вычисления моментов переключе ния и быстродействие предлагаемой системы выше, чем у известной. Так, в предлагаемой системе-управления положением рабочего органа работа манипулятора, введение новых элемен тов позволило уменыиить погрешность определения моментов, переключения в 2,5 раза. Наиболее целесообразно использовать предлагаемую систему для управления положением рабочих органов робото-манипуляторов ,и инструментов металлорежущих станков. Лабораторные исследования показа ли, что переходные процессы в предлагаемой системе, протекают ,без пере регулирования, имеют плавный конечный участок и отличаются от оптимал ных по быстродействию не более чем на 3-5%. Формула изобретения Система прогрг ммного управления, содержащая генератор, имйульсов, последовательно соединенные, блок управления, блок сравнения, преобразователь код-аналог, компа затор, переключатель, привод и датчик обратной связи, выход которого подключен к другому входу блока сравнения, а Тс1кже последовательно соединенные первый сумматор, вычитатель, блок совпадения и триггер, выход которого подключен к второму входу переключателя, а второй вход - к выходу блока управления, второй вход компаратора через датчик скорости соединен с выходом привода, входа первсэго сумматора подключены к выходам блока сравнения и компаратора, а установочные входы вычитателя связаны с выходом блока сравнения, о, т л и ч а ю щ а яс я тем, что, с целью повышения быстродействия системы, она содержит постоянное запоминающее устройство и последовательно соединенные регистр ошибки, второй сумматор и делитель частоты, счетным входом подключенный :К выходу генератора импульсов, а выходом - к счетному входу вычитатбля, устанб вочные входы регистра ошибки соединены с выходом блока сравнения, выход постоянного запоминанндего устройства - с вторым входом второго сумматора, а управлякяций вход регистра ошибки - с выходом первого сумматора . Источники информации, принятые во внимание при экспертизе 1.Павлов А.А. Синтез релейных систем, оптимальных по быстродействию. М., Наука, 1969, с. 98-104. 2.Авторское свидетельство СССР 459761, кл. G 05 В 11/16, 1973. 3.Авторское свидетельство СССР по заявке 2618905/18-24, кл. G 05 В 19/18,,1978 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления | 1978 |
|
SU815714A1 |
| Преобразователь кода системы остаточных классов в позиционный код | 1984 |
|
SU1228290A1 |
| АВТОМАТИЧЕСКИЙ СЛЕДЯЩИЙ ДЕЛИТЕЛЬ ПЕРИОДОВ ИМПУЛЬСНЫХ СИГНАЛОВ | 1992 |
|
RU2105410C1 |
| РАДИАЦИОННЫЙ ТОЛЩИНОМЕР ПОКРЫТИЙ | 1988 |
|
SU1805736A1 |
| Емкостно-электронный преобразователь перемещения | 1989 |
|
SU1721434A1 |
| Устройство стабилизации амплитуды видеосигнала | 1988 |
|
SU1603538A2 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| Устройство для контроля работы электрических машин | 1986 |
|
SU1381560A1 |
| РАДИОИЗОТОПНЫЙ ТОЛЩИНОМЕР ПОКРЫТИЙ | 1990 |
|
SU1729188A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОМЕХ | 1988 |
|
SU1841099A1 |