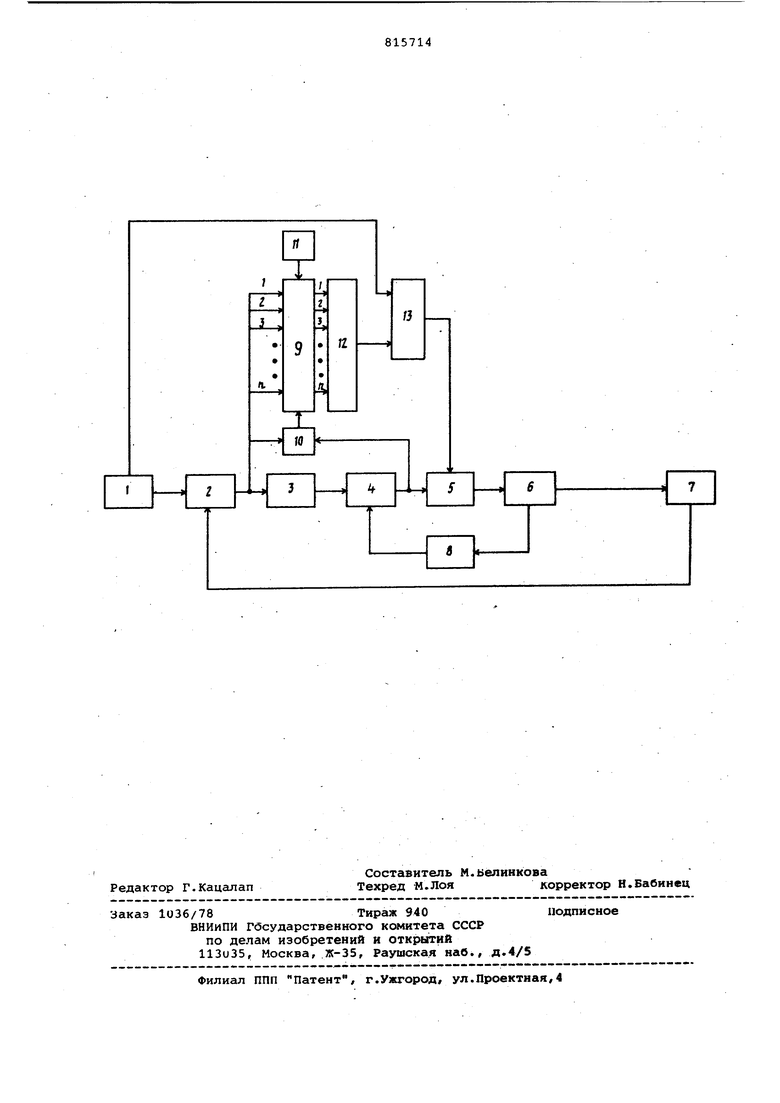
Изобретение относится к автоматиче кому управлению и может быть использовано в позиционных системах управления различными промышленными объектами . Известны системы программного управления, содержащие сумматоры, релей ные элементы, исполнительный двигатель, тахогенератор и преобразователи 11 и 12 . Недостаток этих устройств - сложность их настройки. Наиболее близкой к предлагаемой по технической сущности является система программного управления, содержащая блок управления/ соединенный через блок сравнения с преобразователем код-аналог и последовательно соединенные переключатель и исполнительный привод, а также датчик обратной связи выход которого подключен ко второму входу блока сравнения 131. недостатком этой системы является ее низкое быстродействие. Цель изобретения - повышение быстродеиствия системы. Поставленная цель достигается тем что система содержит сумматор, генератор импульсов, датчик скорости, ком паратор и последовательно соединенные вычитатель, блок совпадения и триггер/ второй вход которого соединен со вторым выходом блока управления/ а выход с первым входом переключателя, вторым входом подсоединенного к одному входу сумматора и выходу комапратора, первым вход которого соединен с выходом преобразователя код-аналог, а второй вход через датчик скорости - со вторым выходом исполнительного привода, другой вход сумматора соединен с выходом блока сравнения и входами вычитателя, второй вход которого подключен к выходу генератора импульсов. На чертеже представлена блок-гсхема предлагаемой системы. Система содержит блок 1 управления, блок 2 сравнения,преобразователь 3 код-аналог, компаратор 4, переклю -: чатель 5/ исполнительный привод 6, датчик 7 обратной связи, датчик 8 скорости, вычитатель 9, сумматор 10, генератор 11 импульсов, блок 12 совпадения и тригге 13. БЛОК 1 задания координат выдает цифровой код перемещения, которое необходимо отработать, и устанавливает в 1 триггер 13. Блок 2 сравнения определяет разность между заданным и действительным положением нагрузки. Преобразователь 3 код-аналог треобразует код этой разности в аналоговьаи сигнал Компаратор 4 сравнивает сигналы ошибки и отрицательной обратной связи по скорости, поступающей с датчика 8 ско рости . Переключатель 5 подключет к исполнительному приводу б напряжение требуемой полярности. Датчик 7 обратной связи измеряет действительное зна чекие регулируемой координаты. Вычита тель 9 запоминает код ошибки в момент определяемый сумматором 10.Генератор 11 подает импульсы на счетный вход вычитателя 9. Сумматор 10 устанавливает один из возможных режимов работы вычитателя 9 (установка начального значения или вычитание). .Блок 12 совпадения определяет момент, когда содержимое вычитателя 9 становится равным нулю и устанавливает триггер 13 в О, что соответствует разрешению на изменение состояния переключателя 5. состояние 1 триггера 13 запрещает изменение состояния переключателя 5. Система работает следующим образом В начальный момент триггер 13 установлен в О, а выходные величины сумматора 10 имеют равные знаки, и вы читатель 9 работает в режиме установки начального значения. Блок 1 выдает сигнал на установку в 1 триггера 13 в начале движения, поэтому управляющее воздействие имеет знак, против положный знаку начальной ошибки. В момент Изменения знака на выходе компаратора 4 выходная величина сумматора 1и переключает вычитатель 9 из режима в установки начального значения в режим вычитания импульсов, по тупающих от генератора 11. Когда содержимое вычитателя 9 становится разным нулю, сигнал блока совпадения 12 устанавливает триггер 13 в О. На пе реключатель 5 поступает сигнал переключения и управляющее воздействие зменяет свой знак на противоположный. Подбором частоты следования импуль сов генератора 11 нетрудно добиться, чтобы длительности первогб и второго интервалов управления незначительно отличались от значений, соответствующих оптимальному по быстродействию управлению, а заключительный участок переходного процесса проходил в скользящем режиме. Это обеспечивает высокое быстродействие в сочетании с отсутствием перерегулирования и плавным подходом нагрузки к заданному положению. Формула изобретения Система программного управления, содержащая блок управления, соединенней через блок сравнения с преобразователем код-аналог и последовательно соединённые переключатель и исполнительный привод, а также датчик обратной связи, выход которого подключен ко второму входу блока сравне.ния, отличающееся тем, что, с целью повышения быстродействия системы, она содержит сумматор, генератор импульсов, датчик скорости, компаратор и последовательно соединенные вычитатель, блок совпадения и триггер, второй вход которого соединен со вторым выходом блока управления, а выход - с первым входом переключателя, вторым входом подсоединенного к одному входу сумматора и выходу компаратора, первый вход которого соединен с выходом преобразователя код-аналог, а второй вход через датчик скорости - со вторым выходом исполнительного привода, другой вход сумматора соединен с выходом блока сравнения и входами вычитателя, второй вход которого подключен к выходу генератора импульсов, а третий вход - к выходу сумматора. Источники информации, принятые во внимание при экспертизе 1.Павлов А.А. Синтез релейных систем, оптимальных по быстродействию, м., Наука, 1966, с.98-1и4. 2.Авторское свидетельство СССР № 459761, кл. G 05 В 11/16, 1975. 3.синтез позиционных систем программного управления. Под .ред. Вавилова А.А. Л., Машиностроение, 1977. с.256-271 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления | 1979 |
|
SU807225A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
| Система позиционного управления | 1985 |
|
SU1247832A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Система программного управления | 1979 |
|
SU817669A1 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| Многоканальный широтно-импульсный регулятор температуры (его варианты) | 1981 |
|
SU978111A1 |
| Частотно-импульсное устройство преобразования сигнала с мостового датчика | 1986 |
|
SU1383474A1 |
| Устройство для программного регулирования | 1990 |
|
SU1837267A1 |