новного канала, это приводит к существенной аппаратурной избыточности системы.
Цель изобретения - создание систегИ, обладающей высокой надежностью и живучестью за счет децентрализации ее структуры и построения по изрархическому принципу, а также использования аппаратуры, обеспечивающей функционирование система при выходе из строя средств программной обработки информации, а также при нормальной работе системы для реализации части ее функций.
Поставленная цель достигается тем, что комплексная система програм много управления, содержащая последевательно соединенные устройства задания режимов, формирователь основно программы, сумматор программ,, группу регуляторов параметров, а также эгщащее устройство координированного управления, первое устройство отображения информации, группу устройств дискретного управления, связанных с блоком исполнительных .органов, и устройство формирования централизо ванной информации, выход которого содинен со входом второго устройства отображе-ния информации, а выходы через устройства сбора дискретной и аналоговой информации - с первыми выходами источников соответственно дискретной и аналоговой информадии, вторые выходы которьй подключены К первым входам группы устройств дискретного управления и вторым входам гругты регуляторов параметров, соответственно, содержит формирователь опткмизируквдих дополнений, устройство согласования дискретных лрогразмм и устройство формирования nporpas® координированного управления, первый и второй входы которого соединены с соответствунадими выходагди залаюэдего устройства координированного управления, третий и четвертый входы с третьими выходамиисточников соответственко дискретной.и аналоговой информации, первый выход со входом первого устройства отображения информацк: , второй выход со входом устройства задания режимов, а третий выход - с первым входом устройства согласования дискретных nporpaNSni, второй вход которого соединен с четвертым выходом источника дискретной информггции, а выходы, - со вторыми входами группы устройств дискретного управления, первый и второй входы формирователя оптимизирукхдих дополнений соответственно со вторым и третьим выходами устройства задания режимов, третий вход - с четвертым выходом .источника аналоговой информации, а выход - со вторым входом сумматора программ.
Устройство формирования программ координированного управления вьтолнено в виде последовательно соединеных первого коммутатора дискретных сигналов, первого блока выбора программ и первого блока переключен программ, а также последовательно соединенных первого комм татора аналоговых сигналов, первого входного регистра и вычислительного блока, второй вход которого через первый /блок переключений программ соединен с выходом первого блока программ, третий вход - с выходом блока временных выдержек, а выходы - со входами регистров соответственно аналоговых сигналов, дискретных сигналов и отображения информации.
Формирователь оптиьдазирующих дополнений выполнен в виде второго коммутатора аналоговых сигналов, входы которого соединены соответственно с выходами блока дифференцирования, интегратора, блока формирования нелинейных сигналов и первого блока памяти, а выход - с первым входом сумматора аналоговых сигналов, второй вход которого соединен со вторым выходом первого бло памяти.
Устройство согласования дискретных программ выполнено в виде последовательно соединенных второго коммутатора дискретных сигналов, второго входного регистра, блока логики и выходного регистра и последовательно соединенных второю блока памяти, второго блока выбора програ и второго блока переключения программ, второй вход которого соединен с выходом второго блока программ, а выход - со вторым входом блока логики-, второй выход которого соединен со входом второго блока памяти, а второй выход второго входного регистра связан со вторым входом второго блока выбора режимов.
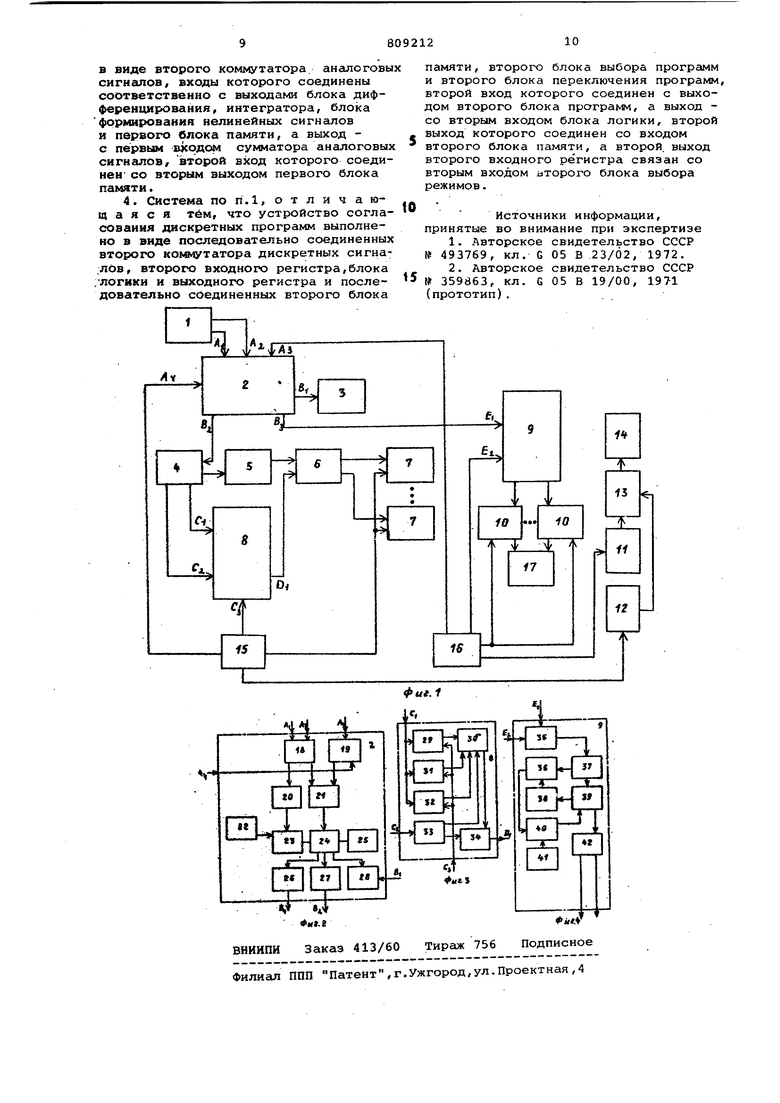
На фиг. 1 представлена система, функциональная схема;на фиг. 2 - 4 схеглй устройства формирования ПЕЮГрамм координированного управления, формирователя оптимизирующий дополнений и устройства согласования дискретных программ соответственно.
Система (фиг.1) содержит эгщгиоадее устройство 1 координированного управления, устройство 2 формирования программ координированного управления, первое устройство 3 отображения информации, устройство 4 задания режимов, формирователь 5 основной програмли, сумматор б программ, группы регуляторов 7 параметров , фор1 шрователь 8 оптимизирукицих дополнений, устройство 9 согласования дискретных программ, группу устройств 10 дискретного управления, устройства 11 и 12 сбора дискретной и аналоговой информации, устройство 13 формирования централизованной информации, второе устройство 14 отображения информации, источники 15 и 16 аналоговой и дискретной информации и блок 17 исполнительных органов. Устройство 2 формирования программ координированного управления содержит (фиг.2) первые коммутаторы 18 и 19 дискретных и аналоговых сигналов, первый блок 20 выбора программ, первый входной регистр 21 первый блок 22 программ, первый блок 23 переключения программ, вычислительный блок 24, блок 25 временных выдержек, регистры 26, 27 и 28 аналоговых сигналов, дискретных сигналов и отображения информации, входы А;, А, АЗ и А и выходы В , В И В. Формирователь 8 оптимизирующих дополнений содержит (фиг.З) блок 29 дифференцирования, второй коммутатор 30 аналоговых сигналов, интегратор 31, блок 32 формирования нелинейных сигналов, первый блок 33 памяти, сумматор 34 аналоговых сигналов, входы С ,. С и С и выход D . Устройство 9 согласования дискре ных программ содержит (фиг.4) второй коммутатор 35 дискретных сигналов, второй блок 36 выбора программ второй входной регистр 37, второй блок 38 памяти, бло; 39 логики,второй блок 40 переключения программ, второй блок 41 программ, выходной регистр 42 и входы Е и E,.j. При исправности всех узлов систе мы ее функционирование происходит следующим образом (фиг.1). С помощью устройства 1 выбираетс режим работы комплекса судовых ТС в целом. Аналоговые и дискретные сигнсшы задания из устройства 1 поступают в устройство 2, где форми руются взаимно координированные про раммы управления отдельными ТС.Аналоговые сигналы згщания для каждого вида ТС поступают в соответствующее ему устройство 4, дискретные сигналы - в устройство 9. Отображение ин формации, необходимой для коордннированного управления, осуществляетс устройством 3, в которое поступают сигналы из устройства 2. В устройстве 4 происходит размножение сигна лов задания. Эти сигналы поступают в формирователи 5 и 8, причем в формирователе 5 производится формирование по упрощенным законс1м программ отдельным регуляторам, а в формирователе 8 дополнений к упрощенным законам, которые после сложения в сумматоре 6 с сигналами фор мирователя 5 обеспечивают формирование оптимальных программ на регуляторы 7. Для формирования программ в устройстве 2 и формирователе 8, а такж для работы регуляторов7 в них поступают сигналы источников 15. Устройство 9 формирует взаимно согласованные Задания на регшизацию дискретных программ управления отдельны агрегатами в устройства 1, в которых вырабатываются сигналы управления отдельными органами блока 17. Для формирования дискретных сигналов в устройствах 2, 9 и 10 в них поступают сигналы источников 16. Сигналы источников 16 и 15 поступают также в Устройства 11 и 12, которые осуществляют их программный ввод в устройство 13, формирующее информационные сигналы в устройство 14. Устройство 2 формирования программ координированного управления (фиг.2) работает следующим образом. Дискретные сигналы задания из устройства 1 через коммутатор 18 поступают в блок 20, осуществляющий их дешифрацию и выбор заданной программы. По сигналу блока 20 блок 23 осуществляет подключение к блоку 24 одного из блоков 22, содержащего заданную програьвлу. Сигналы задания и сигналы от источника 16, уребующне . вычислительной обработки, через коммутаторы 18 и 19 поступают в регистр 21, откуда по программе они вводятся в блок 24 . . Временные выдержки формируются в блоке 25 и по запросу,блока 24 вводятся в него. Сформировангые в блоке 24 сигналы в зависимости от их типа поступают в один из р ггистров 26, 27 или 28. Формирователь В оптимизирующих дополнений (фиг.З) работает следующим образом. Диалоговые сигналы задания и сигналы от источника 15 в блоках 29 и 32 и интеграторе 31 соответственно гаэдвергаются дифференцированию, нелинейиому преобразованию и интегрированию. Блок 33 по сигналам задания режимов фор «1рует в коммутатор 30 сигналы, разрешающие прохождение необходимых в данном режиме сигналов от блоков 29 и 32 и интеграторе 31. В сумматоре 34 производится суммирование сигналов, прошедших коммутатор 30, с коэффициентами, определяемыми блоком 33. Устройство 9 согласования дискретных программ (фиг.4) работает следующим образом. Дискретные сигналы задания и сигналы от источников 16 поступают через коммутатор 35 в регистр 37, откуда они в зависимости от имеющегося признака поступают в блок 39 для логическое обработки, либо в блок 36, осуществляющий выбор программы, соответствуквдей сигналу задания. Этот выбор осуществляется с учетом предшествующих значений логических переменных, хранящихся в блоке 38. Пс командам блока 36 блоком 40 осуществляется подключение к блоку 39 одного из выходов блока 41для реализации необходимой прог. раммы. Результаты обработки информации в блоке 39 поступают з регист 42и далее на выход устройства 9. Система поотроена таким образо, что решение минимально необходимых для функционирования объекта задач поддержания параметров в допустимых пределах и дискретного управления агрегатами обеспечивается ограниченным числом узлов, а именно, уэ. 4-7 и 10. Эти узлы являются наиболее простыми и надежными. Узлы 1,2,3,8,9 обеспечивают координацию управления различными, составными частями объекта и оптимизацию переходных процессов. Узлы 11-14 обеспечивают операторов информацией о состоянии объекта.. При выходе из строя любых узлов, кроме 4-7,10 сис тема может обеспечить функционирова ние объекта, хотя с ухудшенным качеством. В то же,время узлы 4-7,10 .участвуют в работе систегая, выполняя часть ее функций, и при исправности всех остапьных узлов. Функционирование систеки в случав возникновения в ней неисправнос тей , приводящих к тому, что в работ остается М1 нимальное число узлов, происходит следующим образом. Задание значений регулируег их параметро устанавливается по видам ТС с помощ блоков устройства 4. Формирователь 5 форг ирует упрощенные законы регулирования, которые через сумматор б поступают на регуляторы 7, которые по.ддерживают заданные значения. Устройства 10 осуществляют дискретн управление отдельными агрегатами бе взаимной координации режимов их работы. Таким образом, в системе возможн реализация сложных алгоритмов управления и контроля, обеспечивающих координацию и оптимизацию режимов работы оборудования с. помощью устройств 2,8,9 и других; снижаются ап паратурные и стоимостные затраты за счет принятого подхода к резерви рованию путем использования при неисправностях в системе только про стейших устройств, работающих также и при исправности систег. Формула изобретения Комплексная система программного управления, содержащая последовател но соединенные устройст.ва задания режимов, формирователь основной программы, сумматор программ, группу регуляторов параметров, а также задающее устройство координированно го управления, первое устройство отображения информации, группу устрюйств дискретного управления, связанных с блокои исполнительных органов, и устройсиво формирования централизованной информации, выход которого соединен со входом второго устройства отображения информации, а выходы через устройства сбора дискретной и аналоговой информации с первыми выходами источников, соответственно, дискретной и аналоговой информации, вторые выходы которых подключены к первым входам группы устройств дискретного управления и вторым входам группы регуляторов параметров соответственно, отличающаяся тем, что, с целью повышения надежности и живучести системы, она содержит формирователь оптимизирукяцих дополнений, устройство согласования дискретных программ и устройство формирования nporpaiviM координированного управления, первый и второй входы которого соединены с соответствующими выходами задающего устройства координированного управления, третий и четвертый входы с третьими выходами источников соответственно дискретной и аналоговой информации, первый выход - со входом первого устройства отображения информации, второй выход - со входом устройства задания режимов, а третий выход - с первым входом устройства согласования дискретных программ, второй вход которого соединен с четвертым выходом источника дискретной информации, а выходы - со вторыми входами группы устройств дискретного управления, первый и второй входы формирователя оптимизирующих дополнений соответственно со вторым и третьим выходами устройства задания режимов, третий вход - с четвертым выходом источника аналоговой информации, а выход - со вторым входом сумматора программ. 2.Система по п.1, от л ичающаяся тем, что устройство формирования программ координированного управления выполнено в виде последовательно соединенных первого коммутатора дискретных сигналов, первого блока выбора программ и первого блока переключения программ, а также последовательно соединенных первого коммутатора аналоговых сигналов, первого входного регистра и вычислительного блока, второй вход которого через первый блок переключений программ соединен с выходом первого блока программ, третий вход - с выходом блока временных выдержек, а выходы - со входами регитров соответственно ангшсговых сигналов, дискретных сигналов и отображения информации. 3,Система поп.1,отличаюа я с я тем, что формирователь оптимизирующих дополнений выполнен В виде второго коммутатора аналоговы сигналов, входы которого соединены соответственно с выходами блока дифференцирования, интегратора, блока формирования нелинейных сигналов и первого блока памяти, а выход с первым входом сумматора аналоговы сигналов/ Ъторой вход которого соединен со вторым выходом первого блока памяти. 4. Система по ri.l, от л и ч а ющ а я с я тем, что устройство согла сования Jv cкpeтныx программ выполнено в виде последовательно соединенных второго коммутатора дискретных сигналов, второго входного регистра,блока /логики и выходного регистра и последовательно соединенных второго блока памяти, второго блока выбора программ и второго блока переключения программ, второй вход которого соединен с выходом второго блока программ, а выход со вторым входом блока логики, второй выход которого соединен со входом второго блока памяти, а второй выход второго входного регистра связан со вторым входом второго блока выбора режимов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 493769, кл. G 05 В 23/02, 1972. 2.Авторское свидетельство СССР № 359863, кл. G 05 В 19/00, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Обучающее устройство | 1984 |
|
SU1249566A1 |
| Устройство для обработки и ввода информации | 1981 |
|
SU974368A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ ЭЛЕКТРОННЫХ СХЕМ | 1991 |
|
RU2106677C1 |
| Автоматизированная система контроля параметров электронных схем | 1987 |
|
SU1500996A1 |
| Многофункциональный цифровой коррелометр | 1979 |
|
SU826361A1 |
| Устройство для контроля дисплея | 1980 |
|
SU941986A1 |
| УНИФИЦИРОВАННЫЙ ПУЛЬТОВОЙ ПРИБОР | 2004 |
|
RU2276401C2 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| МИКРОПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1993 |
|
RU2079876C1 |
| СПОСОБ ДЛЯ ЦИФРОВОЙ СУБСТРАКЦИОННОЙ АНГИОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2043073C1 |
