1
Изобретение относится к автоматике и может быть использовано в системах числового программного управления, например, автоматическими линия- г ми для поперечной резки рулонной стали в качестве подсистемы для программного управления разматывающим устройством и правильной машиной.
Цель изобретения повышение на- дежности функционирования и расширение области применения системы.
На фиг.1 изображена функциональная
1327
10
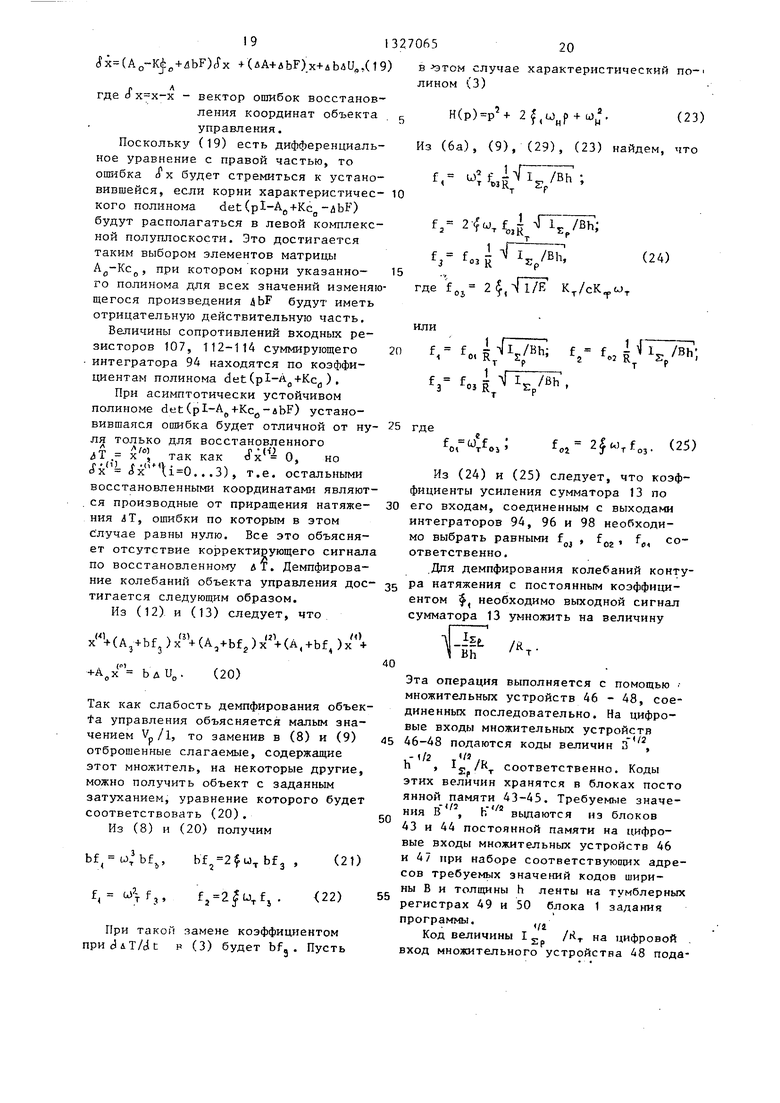
Блок 1 задания программы содержит первый 49 - четвертый 52 тумблерные
схема данной системы.
На фиг.2-8 - функциональные схемы is регистры, тумблер 53, группу резисто- блока задания программы, множитель- ров 54 и потенциометр 55. Нулевой ных устройств, блока коммутации кода радиуса рулона, коммутатора, функционального преобразования,формироваполюс источника питания через размыкающие контакты первого 49 и второго 50 тумблерных регистров соединен с
тель Сигнала коррекции, датчика интен-2о первым 1.1 и вторым 1,2 выходами адсивности разгона и торможения соответственно; на фиг.9 - зависимости магнитного потока V двигателя
Г
е
зависимости от /А различных величинах &/В, , /Rr где I лу двигателя суммарный момент инерции- разматывающего устройства.
от тока возбуждения Ij,; на фиг. 10 пои
МИНО -
.„ (причем
макс - приведенный к текупщй радиус рулона, гп. - максимальное значение величины, макс максимальный радиус рулона, В - ширина ленты, максимальная ширина ленты),
Система для программного управле- og ния программы. Второй положительный
ння (фиг.О содержит блок 1 задания программы с первым 1„1 и вторым 1.2 выходами адреса, выходами режима 1.3, натяжения 1.4, минимального радиуса 1.5 и задания скорости 1.6, первый 2 и второй 3 блоки постоянной памяти, первое 4 - третье 6 множительные устройства, первый 7 - седьмой 13 сумматоры, блок 14 коммутации кодов радиуса рулона, коммутатор 15, первый 16 - четвертый 19 усилители, разматывающее устройст-м во 20, правильную машину 21, рулон 22, первый 23 и второй 24 тахогенерато- ры, первый 25 - третий 27 датчики тока, первый 28 и второй 29 регуля- торы скорости, первый 30 и второй 31 токоограничители, первый 32 и второй 33 регуляторы тока, якори 34 и 35 двигателей разматывающего устройства и правильной машины соответственно, тиристорный преобразователь 36, обмотку 37 возбуждения двигателя разматывающего устройства.
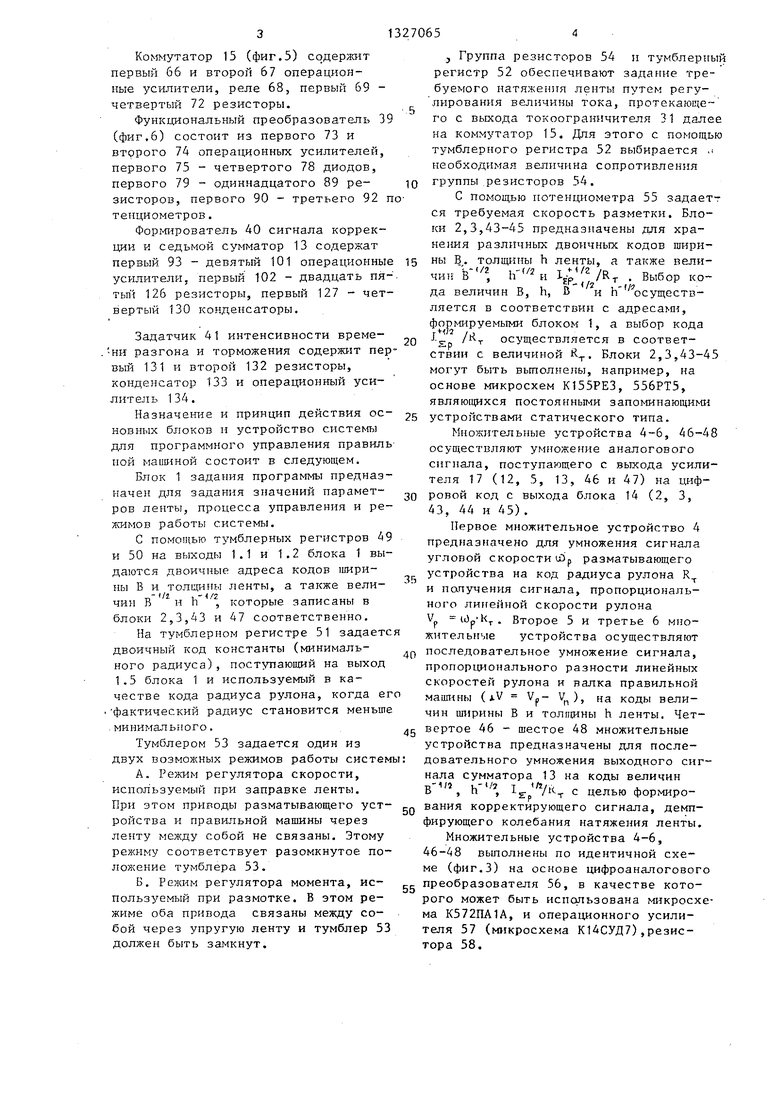
полюс источника питания соединен через среднюю точку потенциометра 55 с выходом 1.6 задания скорости блока 1 задания программы.
40
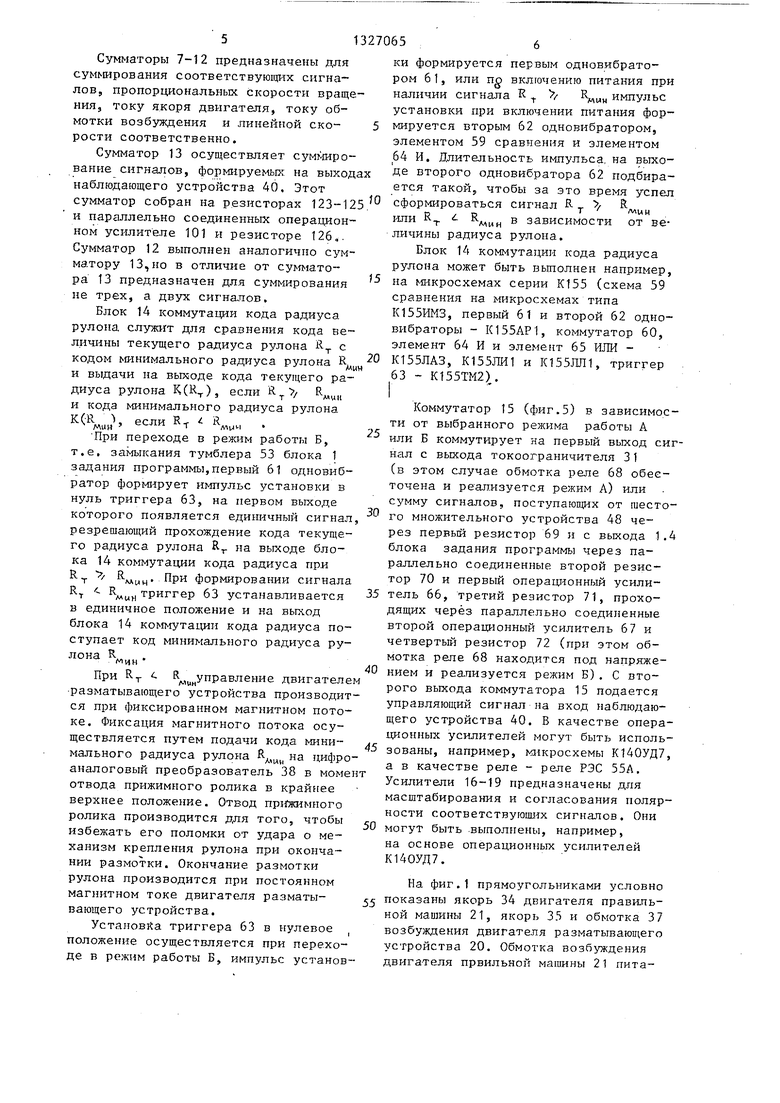
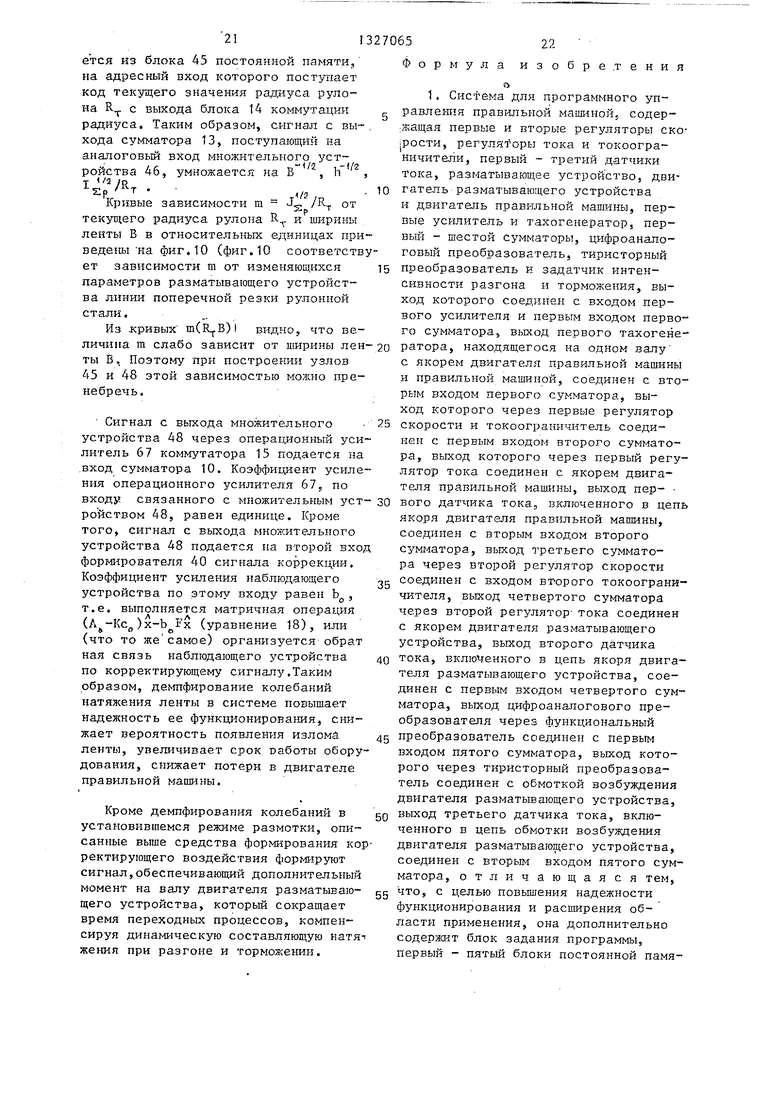
Множительное устройство 4 (5,6,46
48) содержит цифроаналоговый преобразователь 56, операционный усилитель 57, резистор 58. Первый вход . 5 множительного устройства 4 (5,6,46-4 соединен с аналоговым входом цифро- аналогового преобразователя 56, цифровой вход которого соединен с вторы входом множительного устройства 4(5,6,46-48), а выход через параллел но соединенные резистор 58 и операционный усилитель 57 соединен с выхо дом множительного ус гройства 4(5,6-46 48).
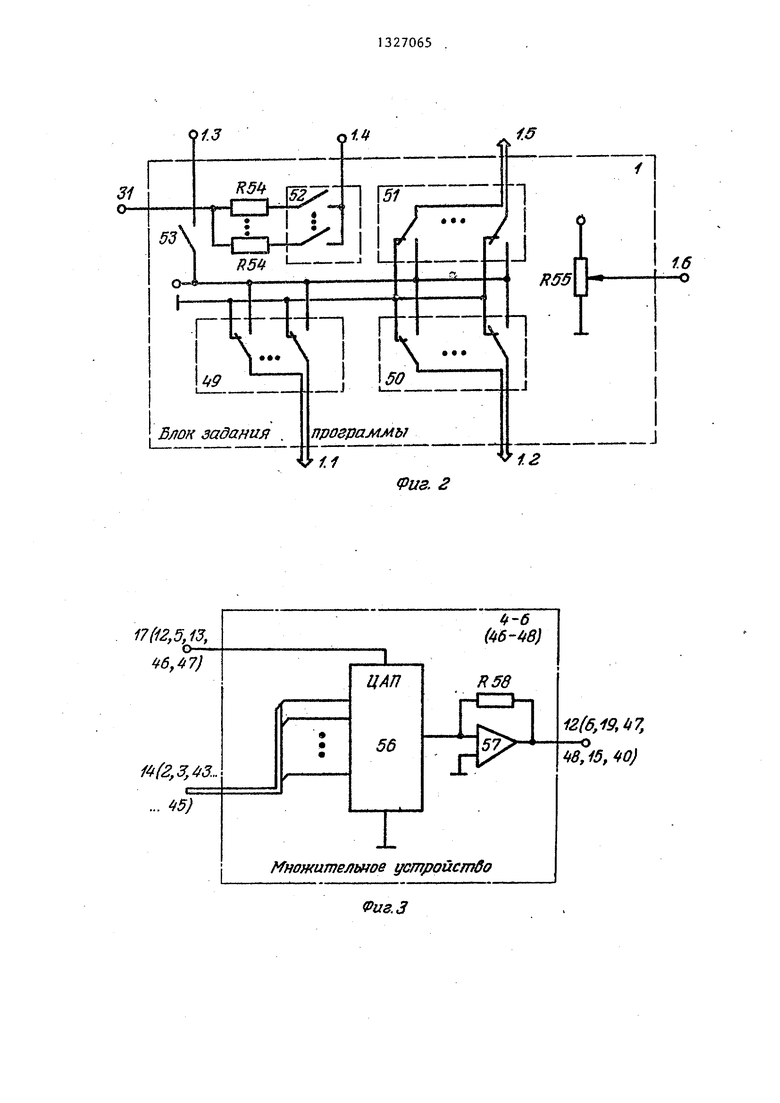
Блок 14 коммутации кода радиуса рулона (фиг.4) содержит элемент 59 сравнения, коммутатор 60 первый 61 и второй 62 одновибраторы, триггер 63 элемент 64 И и элемент 65 1-ШИ.
50
55
г
270652
цифроаналоговый преобразователь 38, функциональный преобразователь 39, формирователе 40, сигнала коррекции, задатчик 41 интенсивности разгона и торможения, измеритель 42 радиуса, третий 43 - пятый 45 блоки постоянной памяти, чет)зертое 46 - шестое 48 множительные устройства.
На фиг.1 показана связь рулона 22 с правильной машиной через упругую ленту.
Блок 1 задания программы содержит первый 49 - четвертый 52 тумблерные
0
регистры, тумблер 53, группу резисто- ров 54 и потенциометр 55. Нулевой
полюс источника питания через размыкающие контакты первого 49 и второго 50 тумблерных регистров соединен с
реса блока 1 задания программы соответственно, а через размыкающие контакты третьего тумблерного регистра 5 1 - с его выходом 1,5 кода
25 минимального радиуса. Первый положительный полюс источника питания соединен с замыкающими контактами первого 49 - третьего 51 тумблерных регистров, а через тумблер 53 - с выхо30 дом 1.3 режима блока 1 задания программы, вход которого через группу резистров 54 и четвертый тумблерный регистр 52 соединен с выходом 1.4 задания натяжения блока 1 задаполюс источника питания соединен через среднюю точку потенциометра 55 с выходом 1.6 задания скорости блока 1 задания программы.
0
Множительное устройство 4 (5,6,4648) содержит цифроаналоговый преобразователь 56, операционный усилитель 57, резистор 58. Первый вход . 5 множительного устройства 4 (5,6,46-48 соединен с аналоговым входом цифро- аналогового преобразователя 56, цифровой вход которого соединен с вторым входом множительного устройства 4(5,6,46-48), а выход через параллельно соединенные резистор 58 и операционный усилитель 57 соединен с выходом множительного ус гройства 4(5,6-46- 48).
Блок 14 коммутации кода радиуса рулона (фиг.4) содержит элемент 59 сравнения, коммутатор 60 первый 61 и второй 62 одновибраторы, триггер 63, элемент 64 И и элемент 65 1-ШИ.
0
5
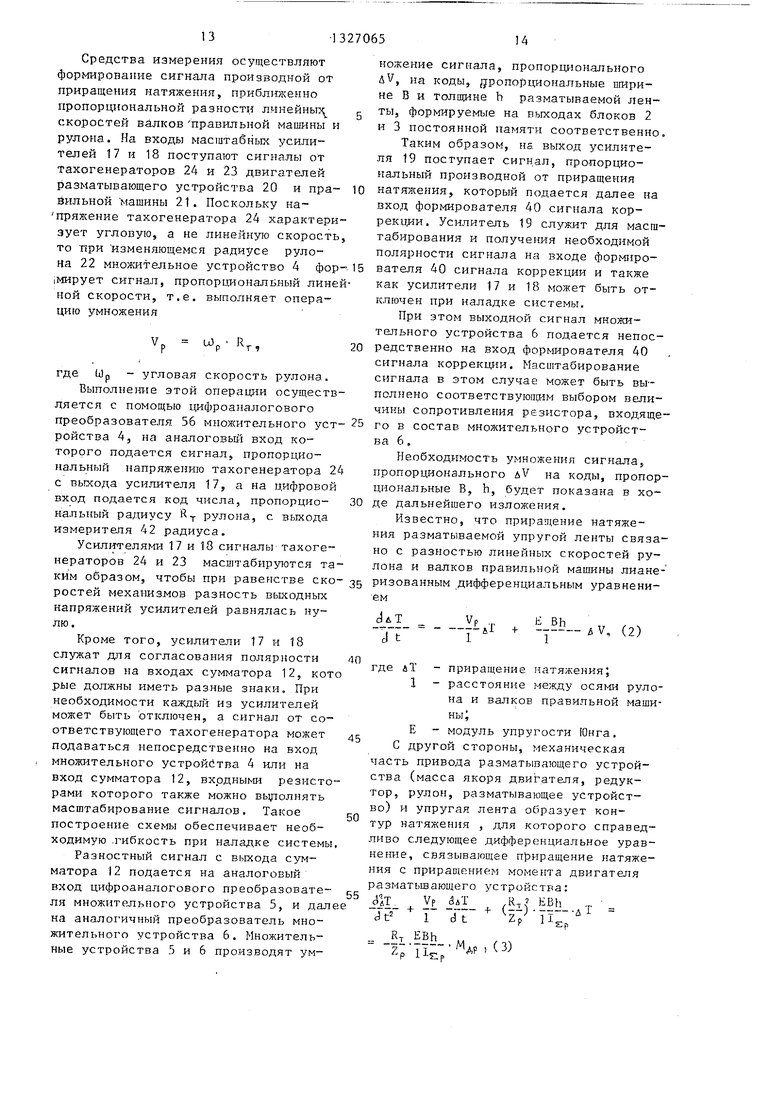
Коммутатор 15 (фиг.5) содержит первый 66 и второй 67 операционные усилители, реле 68, первый 69 - четвертый 72 резисторы.
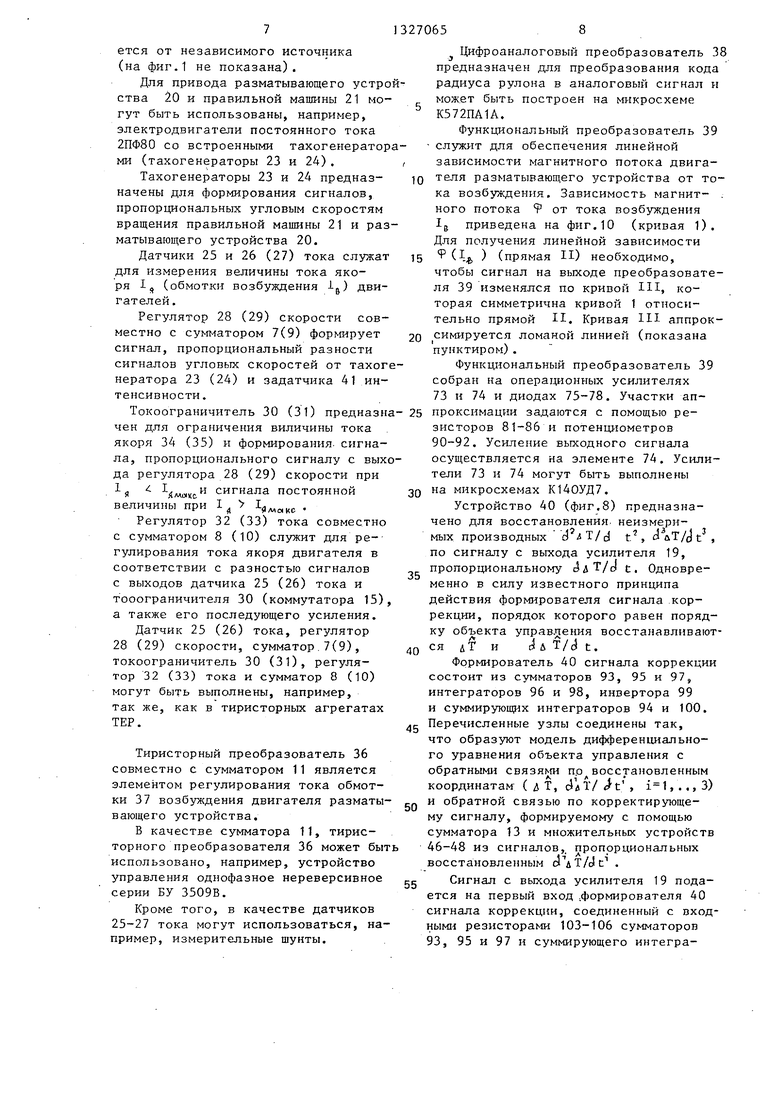
Функхдаональный преобразователь 39 (фиг,6) состоит из первого 73 и второго 74 операционных усилителей, первого 75 - четвертого 78 диодов, первого 79 - одиннадцатого 89 резисторов, первого 90 - третьего 92 потенциометров .
Форг-гирователь 40 сигнала коррекции и седьмой сумматор 13 содержат первый 93 - девятый 101 операционные усилители, первый 102 - двадцать пя-- 126 резисторы, первый 127 - четвертый 130 конденсаторы.
Задатчик 41 интенсивности време- ни разгона и торможения содержит перый 131 и второй 132 резисторы, конденсатор 133 и операционный усиитель 134.
Назначение и принцип действия основных блоков и устройство систем) ля программного управления правиль ной состоит в следующем.
Блок 1 задания программы предназ- для задания значений параметров ленты, процесса управления и ре- ясимоБ работы системы.
С помощью тумблерных регистров 49 и 50 на выходы 1.1 и 1.2 блока 1 выдаются двоичные адреса кодов ширины В и толщины ленты, а также величин В и , которые записаны в блоки 2,3,43 и 47 соответственно.
На тумблерном регистре 51 задается двоичный код константы (минимального радиуса), поступающий на выход 1.5 блока 1 и используемый в качестве кода радиуса рулона, когда его фактический радиус становится меньше минимального.
Тумблером 53 задается один из двух возможных режимов работы системы
А. Режим регулятора скорости, используемый при заправке ленты. При этом приводы разматывающего устройства и правильной машины через ленту между собой не связаны. Этому режиму соответствует разомкнутое по- тумблера 53.
Б. Режим регулятора момента, используемый при размотке. В этом режиме оба привода связаны между собой через упругую ленту и тумблер 53 должен быть замкнут.
5
5
0
0
5
0
5
0
5
0
5
J Группа резисторов 54 и тумблерный регистр 52 обеспечивают задание требуемого натяжения ленты путем регу- лирования величины тока, протекающе- го с выхода токоограничителя 31 далее на коммутатор 15, Для этого с помощью тумблерного регистра 52 выбирается .i необходимая величина сопротивления группы .резисторов 54.
С помощью потенциометра 55 задаетт ся требуемая скорость разметки. Блоки 2,3,43-45 предназначены для хра- не1шя различных двоичных кодов ширины В. ТОЛ1ЦИНЫ h ленты, а также величин В , h 4i . Выбор кода величин В, h, Ь и Ь осуществ- ляется в соответствии с адреса ш, форь-мруемыми блоком 1, а выбор кода J-g. осуществляется в соответствии с величиной ti. Блоки 2,3,43-45 могут быть выполнены, например, на основе микросхем К155РЕЗ, 556РТ5, являюЕЦИхся постоянньми запоминающиьш устройствами статического типа.
Множительные устройства 4-6, 46-48 осуществляют умножение аналогового сигнала, поступающего с выхода усилителя 17 (12, 5, 13, 46 и 47) на цифровой код с выхода блока 14 (2, 3, 43, 44 и 45).
Первое множительное устройство 4 предназначено для умножения сигнала угловой скорости и)р разматывающего устройства на код радиуса рулона R и папучения сигнала, пропорционального линейной скорости рулона VP iOp k. Второе 5 и третье 6 множительные устройства осуществляют последовательное умножение сигнала, пропорн юнального разности линейных скоростей рулона и валка правильной машины (xV Vp- V), ja коды величин 1т1рины В и толщины h ленты. Четвертое 46 - шестое 48 множительные устройства предназначены для последовательного умножения выходного сигнала сумматора 13 на коды величин , , с целью формирования корректирующего сигнала, демпфирующего колебания натяжения ленты.
Множительные устройства 4-6, 46-48 выполнены по идентичной схеме (фиг.З) на основе цифроаналогового преобразователя 56, в качестве которого может быть использована микросхема К572ПА1А, и операционного усилителя 57 (микросхема К14СУД7),резистора 38.
5
Сумматоры 7-12 предназначены дл суммирования соответствующих сигналов, пропорциональных скорости врания, току якоря двигателя, току обмотки возбуждения и линейной скорости соответственно.
Сумматор 13 осуществляет суммирвание сигналов, формируемьпг на вых наблюдающего устройства 40, Этот сумматор собран на резисторах 123и параллельно соединенных операционом усилителе 101 и резисторе 126, Сумматор 12 выполнен аналогично суматору 13,но в отличие от сумматора 13 предназначен для суммировани не трех, а двух сигналов.
Блок 14 коммутации кода радиуса рулона служит для сравнения кода вR
личины текущего радиуса рулона л
кодом минимального радиуса рулона и выдачи на вькоде кода текущего рдиуса рулона K(RT.)J если К„„ и кода минимального радиуса рулона
KC1.,,,. если
RT
При переходе в режим работы Б, т.е. замьпсания тумблера 53 блока 1 задания программы,первый 61 одновиб- ратор формирует импульс установки в нуль триггера 63, на первом выходе которого появляется единичный сигнал резрешающий прохождение кода текущего радиуса рулона з выходе блока 14 коммутации кода радиуса при RT ,, При формировании сигнала RT - Алин триггер 63 устанавливается в единичное положение и на выход блока 14 коммутации кода радиуса поступает код минимального радиуса .ИH
При RT д.,у„Управление двигателе
разматывающего устройства производится при фиксированном магнитном потоке. Фиксация магнитного потока осуществляется путем подачи кода мини- мального радиуса рулона R,, на цифро аналоговый преобразователь 38 в моме отвода прижимного ролика в крайнее верхнее положение. Отвод при шмного ролика производится ддя того, чтобы избежать его поломки от удара о механизм крепления рулона при окончании размотки. Окончание размотки рулона производится при постоянном магнитном токе двигателя разматывающего устройства.
Установка триггера 63 в нулевое положение осуществляется при переходе в режим работы Б, импульс установ
O
ки формируется первым одновибрато- ром 61, или п включению питания при наличии сигнала К . R импульс установки при включении питания формируется вторым 62 одновибратором, элементом 59 сравнения и элементом 64 И. Длительность импульса, на выходе второго одновибратора 62 подбирается такой, чтобы за это время успел сформироваться сигнал R и.
1-ШИ
R i R
Мин
в зависимости
лин от ве
личины радиуса рулона.
Блок 14 коммутации кода радиуса рулона может быть выполнен например, на микросхемах серии К155 (схема 59 сравнения на микросхемах типа К155ИМЗ, первый 61 и второй 62 одно- вибраторы - К155АР1, коммутатор 60, элемент 64 И и элемент 65 ИЛИ - К155ЛАЗ, К155ЛИ1 и К155ЛЛ1, триггер
63 - К155ТМ2).
5
0
0
jf
0
Коммутатор 15 (фиг.5) в зависимости от выбранного режима работы А или Б коммутирует на первый выход сигнал с выхода токоограничителя 31 (в этом случае обмотка реле 68 обесточена и реализуется режим А) или сумму сигналов, поступающих от шестого множительного устройства 48 через первый резистор 69 и с выхода 1.4 блока задания программы через параллельно соединенные второй резистор 70 и первый операционный усили- 5 тель 66, третий резистор 71, проходящих через параллельно соединенные второй операционный усилитель 67 и четвертый резистор 72 (при этом обмотка реле 68 находится под напряжением и реализуется режим Б). С второго выхода коммутатора 15 подается управляющий сигнал на вход наблюдающего устройства 40. В качестве операционных усилителей могут быть использованы, например, з кpocxeмы К140УД7, а в качестве реле - реле РЭС 55А, Усилители 16-19 предназначены для масштабирования и согласования полярности соответствующих сигналов. Они могут быть .выполнены, например, на основе операционных усилителей К140УД7.
jf
На фиг.1 прямоугольниками условно показаны якорь 34 двигателя npaBRHb- ной машины 21, якорь 33 и обмотка 37 возбуждения двигате.ля разматывающего устройства 20. Обмотка возбуждения двигателя првильной машины 21 питается от независимого источника (на фиг.1 не показана).
Для привода разматывающего устроства 20 и правильной машины 21 могут быть использованы, например, электродвигатели постоянного тока 2ПФ80 со встроенными тахогенератор ми (тахогенераторы 23 и 24).
Тахогенераторы 23 и 24 предназначены для формирования сигналов, пропорциональных угловым скоростям вращения правильной машины 21 и разматывающего устройства 20.
Датчики 25 и 26 (27) тока служат для измерения величины тока якоря I,, (обмотки возбуждения J-) двигателей .
Регулятор 28 (29) скорости совместно с сумматором 7(9) формирует сигнал, пропорциональный разности
Функциональный преобразователь собран на операционных усилителях 73 и 74 и диодах 75-78. Участки ап
сигналов угловых скоростей от тахоге- нератора 23 (24) и задатчика 41 интенсивности.
Токоограничитель 30 (31) предназна- 25 проксимации задаются с помощью речей для ограничения виличины тока зисторов 81-86 и потенциометров якоря 34 (35) и формирования, сигна- 90-92. Усиление выходного сигнала ла, пропорционального сигналу с выхода регулятора 28 (29) скорости при
осуществляется на элементе 74. Усил тели 73 и 74 могут быть выполнены
x/wuiKt сигнала постоянной 1, I.
величины при / -(длo.кc
Регулятор 32 (33) тока совместно с сумматором 8 (Ю) служит для ре-- гулирования тока якоря двигателя в соответствии с разностью сигналов с выходов датчика 25 (26) тока и тооограничителя 30 (коммутатора 15) а также его последующего усиления.
Датчик 25 (26) тока, регулятор 28 (29) скорости, сумматор.7(9), Токоограничитель 30 (31), регулятор 32 (33) тока и сумматор 8 (10) могут быть выполнены, например, так же, как в тиристорных агрегатах ТЕР.
Тиристорный преобразователь 36 совместно с сумматором 11 является элементом регулирования тока обмотки 37 возбуждения двигателя разматывающего устройства.
В качестве сумматора 11, тирис- торного преобразователя 36 может бы использовано, например, устройство управления однофазное нереверсивное серии БУ 3509В.
Кроме того, в качестве датчиков 25-27 тока могут использоваться, например, измерительные шунты.
Цифроаналоговый преобразователь 38 предназначен для преобразования кода радиуса рулона в аналоговый сигнал и может быть построен на микросхеме
К572ПА1А.
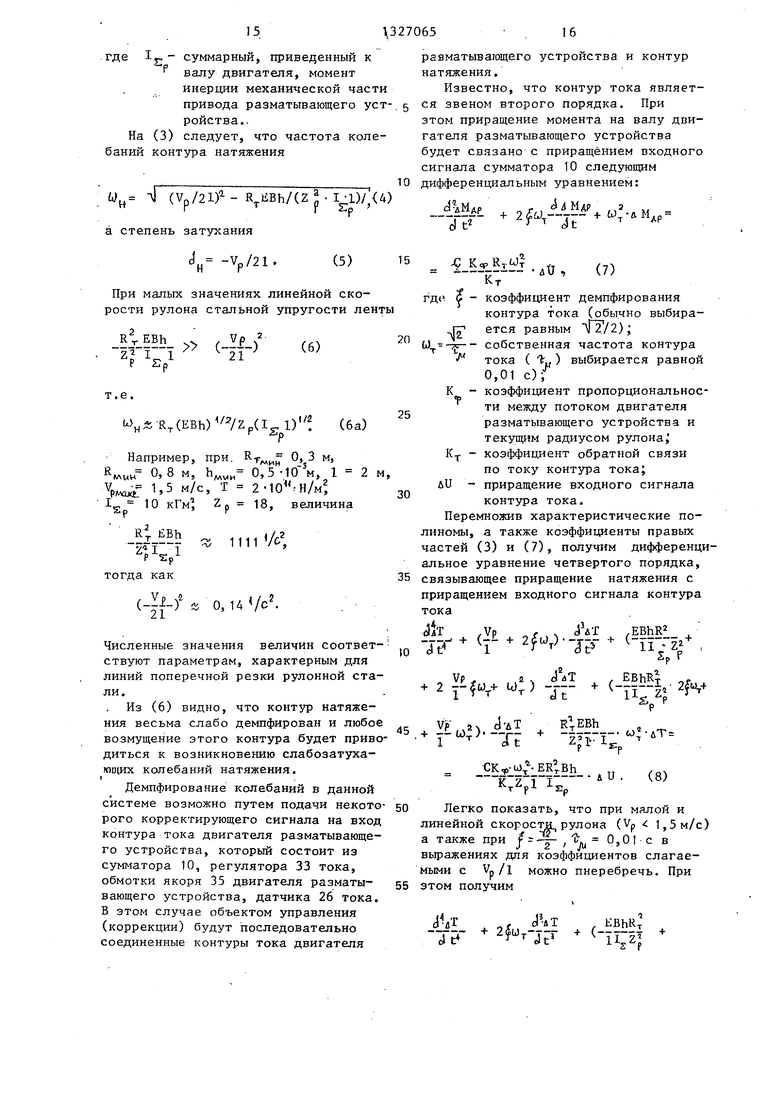
Функциональный преобразователь 39 служит для обеспечения линейной зависимости магнитного потока двигателя разматывающего устройства от тока возбуждения. Зависимость магнит- . ного потока 9 от тока возбуждения Ig приведена на фиг.10 (кривая 1). Для получения линейной зависимости
; ) (прямая II) необходимо,
чтобы сигнал на выходе преобразователя 39 изменялся по кривой Ш, которая симметрична кривой 1 относительно прямой II. Кривая III аппроксимируется ломаной линией (показана пунктиром).
Функциональный преобразователь 39 собран на операционных усилителях 73 и 74 и диодах 75-78. Участки ап25 проксимации задаются с помощью резисторов 81-86 и потенциометров 90-92. Усиление выходного сигнала
5
0
осуществляется на элементе 74. Усилители 73 и 74 могут быть выполнены
Q на микросхемах К140УД7.
Устройство 40 (фиг.8) предназначено для восстановления, неизмеримых производных t , cl лТ/J t , по сигналу с выхода усилителя 19, пропорциональному А&Т/о t. Одновременно в силу известного принципа действия формирователя сигнала коррекции, порядок которого равен порядку объекта управ- ения восстанавливаются дТ и о д Т/( t.
Формирователь 40 сигнала коррекции состоит из сумматоров 93, 95 и 97, интеграторов 96 и 98, инвертора 99 и суммируюш 1Х интеграторов 94 и 100.
с Перечисленные узлы соединегш так, что образуют модель дифсЬеренциально- го уравнения объекта управления с обратными связями по восстановленным координатам ( Т, Т/ t , i 1, .., 3) и обратной связью по корректирующему сигналу, формируемому с помощью сумматора 13 и множительных устрор ств 46-48 из сигналов, пропорциональных восстановленным с} дТ/с1с .
Сигнал с выхода усилителя 19 подается на первый вход .формирователя 40 сигнала коррекции, соединенный с входными резисторами 103-106 сумматоров 93, 95 и 97 и суммирующего интегра0
5
тора 100. На третий вход формирователя 40 сигнала коррекции, соединен- ный с входным резистором 102 сумматора 93, подается сигнал задания натяжения с второго выхода коммутатора 15 с целью комп енсации ошибок восстановления и Т, J /)T/jt при изменении этого сигнала. На входы (резисторы 107, 112-114.) суммирующего интегратора 94 подаются сигналы, пропорциональные восстановленным д Т/ t и йТ соответственно.
Постоянные времени суммирующего
интегратора 94 по этим входам являют-15 хранятся коды величин ширины и толся некоторыми математическими комбинациями из коэффициентов дифференциального уравнения объекта управления и коэффициентов обратной связи по восстановленным йТ c iT/Jt , т.е. с помощью резисторов 107, 112-114 при соответствующем выборе их величин сопротивлений осуществляется модлирование и обратная связь по вос- становлершым А dT/ c t .
Обратная связь по сигналу коррекции осуществляется подачей сигнала с выхода множительного устройства 48 на второй вход формирователя 40 сигнала коррекции, который соединен с входным резистором 117 суммирующего интегратора 94.
Сигналы, пропорциональные восстановленным с5 i T/j t , с выходов интеграторов 94, 96 и 98 подаются на первый - третий входы (резисторы 123 125) сумматора 13, выход которого соединен с входом множительного устройства 46. Устройство 40 и сумматор 13 могут быть выполнены, например на операционных усилителях К140УД7.
Задатчик 41 иптенсивности времени разгона и торможения (фиг.8) представляет собой апериодическое звено, задающее время разгона и торможения приводов при скачкообразном изменении сигнала, поступающего с выхода 1.6 блока задания программы. Требуемое время разгона-торможения задается путем соответствующего выбора постоянной времени, определяемой произведением величин сопротивления резистора 131 и емкости конденсатора 133. Коэф- фип;иент усиления задатчика 41 интенсивности времени разгона и торможения определяется отношением величин сопротивления резисторов 132 и 131. Задатчик 41 интенсивности может быть
реализован, например, Fia микросхеме К140УД7.
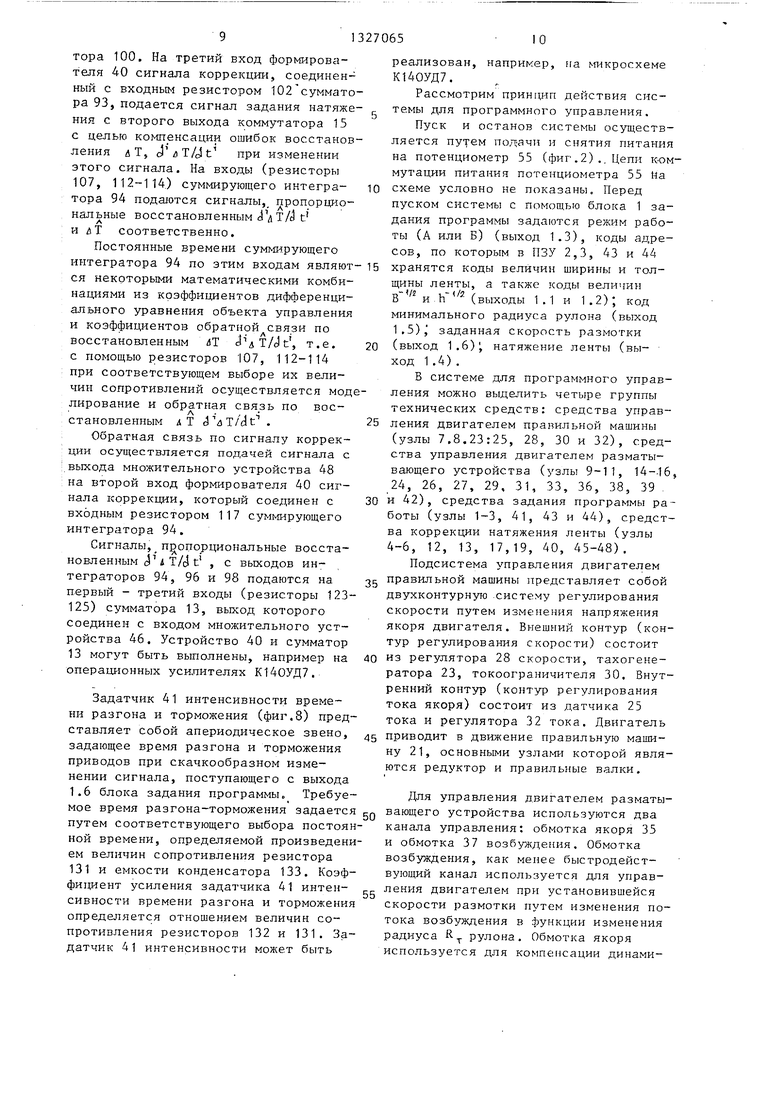
Рассмотрим прингщп действия системы для программного управления.
Пуск и останов системы осуществляется путем подачи и снятия питания на потенциометр 55 (фиг.2)., Цепи коммутации питания потенциометра 55 Ма схеме условно не показаны. Перед пуском системы с помощью блока 1 задания программы задаются режим работы (А или Б) (выход 1.3), коды адресов, по которым в ПЗУ 2,3, 43 и 44
щины ленты, а также коды величин .h (выходы 1,1 и 1.2); код минимального радиуса рулона (выход 1.5)1 заданная скорость размотки
(выход 1,6), натяжение ленты (выход 1 .4) ,
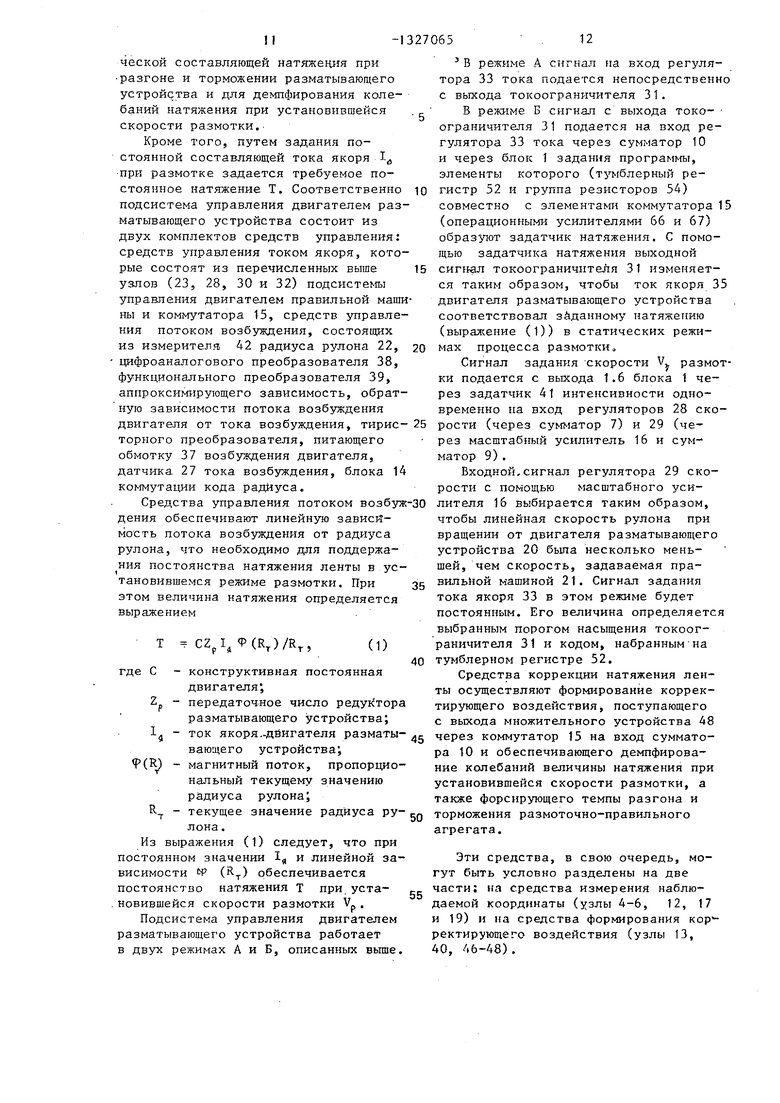
В системе для программного управления можно выделить четыре группы технических средств: средства управления двигателем правильной машины (узлы 7.8.23:25, 28, 30 и 32), средства управления двvIгaтeлeм разматывающего устройства (узлы 9-11, 14-16, 24, 26, 27, 29, 31, 33, 36, 38, 39
и 42), средства задания программы работы (узлы 1-3, 41, 43 и 44), средства коррекции натяжения ленты (узлы 4-6, 12, 13, 17,19, 40, 45-48),
Подсистема управления двигателем
правильной машины -(редставляет собой двухконтурную .систему регулирования скорости путем изменения напряжения якоря двигателя. Внешний контур (контур регулирования скорости) состоит
из регулятора 28 скорости, тахогене- ратора 23, токоограничителя 30. Внутренний контур (контур регулирования тока якоря) состоит из датчика 25 тока и регулятора 32 тока. Двигатель
приводит в движение правильную мапи- ну 21, основными узлами которой являются редуктор и правильные валки.
Для управления двигателем разматывающего устройства используются два канала управления: обмотка якоря 35 и обмотка 37 возбуждения. Обмотка возбуждения, как менее быстродействующий канал используется для управления двигателем при установившейся скорости размотки путем изменения потока возбуждения в функции изменения радиуса К. рулона. Обмотка якоря используется для компенсации динами- 5
ческой составляющей натяжения при разгоне и торможении разматывающего устройства и для демпфирования колебаний натяжения при установившейся скорости размотки,Кроме того, путем задания постоянной составляющей тока якоря 1 при размотке задается требуемое постоянное натяжение Т. Соответственно ю подсистема управления двигателем разматывающего устройства состоит из двух комплектов средств управления: средств управления током якоря, которые состоят из перечисленных выше 15 узлов (23, 28, 30 и 32) подсистемы управления двигателем правильной машины и коммутатора 15, средств управления потоком возбуждения, состоящих из измерителя, 42 радиуса рулона 22, 20 цифроаналогового преобразователя 38, функционального преобразователя 39, аппроксимирующего зависимость, обратную зависимости потока возбз дения двигателя от тока возбуждения, тирис- 25 торного преобразователя, питающего обмотку 37 возбуждения двигателя, датчика 27 тока возбуждения, блока 14 коммутации кода радиуса.
Средства управления потоком возбуж-30 дения обеспечивают линейную зависимость потока возбуждения от радиуса рулона, что необходимо для поддержа- ния постоянства натяжения ленты в установившемся режиме размотки. При 35 этом величина натяжения определяется выражением
Т CZpI, 9(R,)/R, (i;
где С - конструктивная постоянная
двигателя; ZP - передаточное число редук тора
разматывающего устройства; 1 - ток якоря-дйигателя разматывающего устройства; 9(Ю - магнитный поток, пропорциональный текущему значению радиуса рулона;
R - текущее значение радиуса рулона .
Из выражения (1) следует, что при пос1 оянном значении 1 и линейной зависимости № (R-r обеспечивается постоянство натяжения Т при установившейся скорости размотки Vp,
Подсистема управления двигателем разматывающего устройства работает в двух режимах А и Б, описанных вьше.
5
ю 15 025
0 5
0
5
0
5
В режиме А сигнал на вход регулятора 33 тока подается непосредственно с выхода токоограничителя 31.
В режиме Б сигнал с выхода токе- ограничителя 31 подается на вход регулятора 33 тока через сумматор 10 и через блок 1 задания пpoгpaм ы, элементы которого (тумблерный регистр 52 и группа резисторов 54) совместно с элементами коммутатора 15 (операционными усилителями 66 и 67) образуют задатчик натяжения. С помощью задатчика натяжения выходной сигьшл токоограничителя 31 изменяется таким образом, чтобы ток якоря 35 двигателя разматывающего устройства соответствовал заданному натяжению (выражение (1)) в статических режимах процесса размотки о
Сигнал задания скорости V размотки подается с выхода 1.6 блока 1 через задатчик 41 интенсивности одновременно на вход регуляторов 28 скорости (через 7) и 29 (через масштабный усилитель 16 и сумматор 9) .
Входной,сигнал регулятора 29 скорости с помощью масштабного усилителя 16 выбирается таким образом, чтобы линейная скорость рулона при вращении от двигателя разматывающего устройства 20 была несколько меньшей, чем скорость, задаваемая правильной машиной 21. Сигнал задания тока якоря 33 в этом режиме будет постоянным. Его величина определяется выбранным порогом насыщения токоограничителя 31 и кодом, набранным на тумблерном регистре 52.
Средства коррекции натяжения ленты осуществляют формирование корректирующего воздействия, поступающего с выхода множительного устройства 48 через коммутатор 15 на вход сумматора 10 и обеспечивающего демпфирование колебаний величины натяжения при установившейся скорости размотки, а также форсирующего темпы разгона и торможения размоточно-правильного агрегата.
Эти средства, в свою очередь, могут быть условно разделены на две части: на средства измерения наблюдаемой координаты (узлы 4-6, 12, 17 и 19) и на средства формирования ректирующего воздействия (узлы 13, 40, 46-48).
Средства измерения осуществляют формиронание сигнала производной от приращения натяжения, приближенно пропорциональной разности линейны:; скоростей валков правильной машины и рулона. На входы масштабных усилителей 17 и 18 поступают сигналы от тахогенераторов 24 и 23 двигателей разматывающего устройства 20 и пра- вильной машины 21. Поскольку на- прял ение тахогенератора 24 характеризует угловую, а не линейную скорость, то тгри изменяющемся радиусе рулона 22 множительное устройство 4 фор- 1мирует сигнал, пропорциональный линейной скорости, т.е. выполняет операцию умножения
V
Р
и)„ Я
т ч
где ц)р - угловая скорость рулона.
Выполнегоге этой операции осуществляется с помощью цифроаналогового преобразователя 56 множительного уст- ройства 4, на аналоговый вход которого подается сигнал, пропорциональный напряжению тахогенератора 24 с выхода усилителя 17, а на цифровой вход подается код числа, пропорцио- нальный радиусу Ry рулона, с выхода измерителя 42 радиуса.
Усилотелями 17 и 18 сигналы тахогенераторов 24 и 23 масштабируются таким образом, чтобы при равенстве ско- ростей механизмов разность выходных напряжений усилителей равнялась нулю .
Кроме того, усилители 17 и 18 служат для согласования полярности сигналов на входах сумматора 12, кото рые должны иметь разные знаки. При необходимости каждьш из усилителей может быть отключен, а сигнал от со- ответствуюп1его тахогенератора может подаваться непосредственно на вход множительного устройства 4 или на вход сумматора 12, входными резисторами которого также можно выдолнять масштабирование сигналов. Такое построение схемы обеспечивает необходимую .гибкость при наладке системы
Разностный сигнал с выхода сумматора 12 подается на аналоговый вход цифроаналогового преобразовате- ля множительного устройства 5, и дал на аналогичный преобразователь множительного устройства 6. Множительные устройства 5 и 6 производят умг5 0
25 30
35
40 45 gQ
ножение сигнала, пропорционального дУ, на коды, ;7ропори 5ональные ширине В и толщине h разматываемой ленты, формируемые на выходах блоков 2 и 3 постоянной памяти соответственно.
Таким образом, н& выход усилителя 19 поступает сигнал, пропорциональный производной от приращения натяжения, который подается далее на вход формирователя 40 сигнала коррекции. Усилит&пь 19 служит для масштабирования и получения необходимой полярности сигнала на входе формирователя 40 сигнала коррекции и также как усилители 17 и 18 может быть отключен при наладке системы.
При этом выходной сигнал множительного устройства 6 подается непосредственно на вход формирователя 40 сигнала коррекции. Масштабирование сигнала в этом случае может быть выполнено соответствуюгид м выбором величины сопротивления резистора, входящего в состав множительного устройства 6 .
Необходимость умножения сигнала, пропорционального iV на коды, пропорциональные В, h, будет показана в ходе дальнейшего изложения.
Известно, что приращение натяжения разматываемой упругой ленты связано с разностью линейных скоростей рулона и валков правильной машины лиане- ризованным дифференциальным уравнением
duT Vp Tt
. i-5h-.V, (2)
где uT - приращение натяжения;
1 - расстояние между осями рулона и валков правильной машины j
Е - модуль упругости Юнга. С другой стороны, механическая часть привода разматывающего устройства (масса якоря двигателя, редуктор, рулон, разматывающее устройство) и упругая лента образует контур натяжения , для которого справедливо следующее дифференциальное уравнение, связывающее приращение натяжения с прирап1ением момента двигателя разматьшающего устройства:
Yl ( 1 Z
f f -р ,
7 ГГ 1 at /ip 1JL,
р
RT EBh
Zp IL
-
МАР.(З)
где - суммарный, приведенный к валу двигателя, момент инерции механической части привода разматывающего уст-. ройства..
На (3) следует, что частота колебаний контура натяжения
WH л (Vp/21) - R iiBh/(Z - ))
а степень затухания
c}j -Vp/21.
(5)
При малых значениях линейной скорости рулона стальной упругости ленты
«|-.f-b, ( (6)
Р si
21
т.е.
il/2
((KBh)()t (6а)
Например, при. Rт„,н О, 3 м, 0,8 м, 0,5-10 м, 1 2 м, Avixt Ь5 м/с, Т ,30
Ig 10 кГм р 18 величина
,Ь,Нь « ,,„./4
pl,:,
тогда как
VP л
(f)% o.uVc
Численные значения величин соответ
ствуют параметрам, характерным для линий поперечной резки рулонной стали.
Из (6) видно, что контур натяжения весьма слабо демпфирован и любое возмущение этого контура будет приводиться к возникновению слабозатухающих колебаний натяжения.
Демпфирование колебаний в данной системе возможно путем подачи некото рого корректирующего сигнала на вход контура тока двигателя разматывающего устройства, который состоит из сумматора 10, регулятора 33 тока, обмотки якоря 35 двигателя разматы- вающего устройства, датчика 26 тока. В этом случае объектом управления (коррекции) будут последовательно соединенные контуры тока двигателя
5
0
раяматывагощего устройства и контур натяжения.
Известно, что контур тока является звеном второго порядка. При этом приращение момента на валу двигателя разматывающего устройства будет связано с приращением входного сигнала сумматора 10 следующим дифференциальным уравнением:
„4).t.,f,. „;..„„
dt
5
0
5
0
5
(7)
т
лР
Т
g K- 5lb j . ,tJ ,
KT
гд с - коэффициент демпфирования
контура тока (обычно выбирается равным v2V2); собственная частота контура тока ( i u) выбирается равной 0,01 c)i
К - коэффициент пропорциональное- ти между потоком двигателя разматывающего устройства и текущим радиусом рулона К - коэффициент обратной связи
по току контура тока ли - приращение входного сигнала
контура тока.
Перемножив характеристические полиномы, а также коэффициенты правых частей (3) и (7), получим дифференциальное уравнение четвертого порядка, связывающее приращение натяжения с приращением входного сигнала контура тока
to
Vp- s d-дТR EBh
--(л);.
CK,,u).ER Bh
K.Zpl
AU .
(8)
Легко показать, что при малой и линейной CKopoc HL рулона (Vp 1,5м/с)
/ .7u О О а также при
выражениях для коэффициентов слагаемыми с VP/1 можно пнеребречь. При этом получим
о г
zju -jpEBhRr ,
р
При пренебрежении величиной Vjj/i из (2) следует, что
JuT/cJt uVEBh/1 , (10)
BhuV ,
(11)
где 1/Е, т.е. для получения сигнала, пропорционального о1 л Т/Jt, измеренную разность линейных скоростей AV необходимо умножить на величину, пропорциональную Bh,
Известно, что колебательность системы уп15авления зависит от размещения корней ее характеристического полинома в левой комплексной полуплоскости. Корни, в свою очередь являются непрерывными функциями коэффициентов характеристического полинома.
При пренебрежении Vp/1 пара корней характеристического полинома управления является чисто мнимой, т.е. в такой системе имеют место нез тухающие колебания (в действительности при хающие).
Демпфирование колебаний осуществляется с помощью описанных ранее формирователя 40 сигнала коррекции, сумматора 13, множительных устройств 46-48, представляющих собой средства коррекции.
Запишем (9) в виде
V /1 Ф О - слабозату
А.,
biU , .(12)
где x J 4T/Jt (i О, ..,4). При этом
ли ли„ - 3) 1-1
где f,- - коэффициенты обратной связи; х - восстановленные производные
с) дт/ J t ;
6Цд - сигнал задания натяжения, Уравнение (12) с учетом (13) в матричной форме записывается следующим образом:
i Ах - bF + Ьди,. (14)
где А - сопровождающая матрица коэффициентов объекта управления (коэффициенты А - в (12) X - вектор координат объекта
(i),
управления к , b - коэффициент усиления объекта
управления; F - матрица-строка коэффициентов
обратной связи.
Уравнение для измеримой величины, пропорциональнойJ 4T/clt (выходного сигнала усилителя 19):
(15)
У с х .
При этом
. .
(16)
где К. - коэффициент передачи узлов 4-6, 12, 17-19, 23 и 24 (фиг,1). .
Поскольку А и b (14) зависят от изменяемых параметров (B,h, ) объекта управления, то (14) можно представить, как
X (А + fiA)x - (Ь.+ Д b)Fx +
30
+ (Ьд + йЬ) А Uo ,
(17)
5
0
5
0
где А,- Ь(, - некоторые фиксированные
(начальные) значения; лА ,аЬ - приращение матрицы А. и коэффициента усиления, -С другой стороны описанное выше наблюдающее устройство 40 совместно с узлами 13, 46-48, моделирует матричное дифференциальное уравнение
X (А„- КС„- boF)x + Кс„х + Ь,ди„(18)
где К - матрица-столбец коэффициен- тов усиления К,- измеряемой величиныY( 15), которые равны коэффии,иентам обратной связи но восстановленным координатам х (выражение в скобках (18)).
Коэффициенты К определяются величинами сопротивления входных резисторов (103-106), cyf-гматоров 93,95,97 и суммирующего интегратора 100 формирователя 40 сигнала коррекции.
Вычитая из (17) и (18) и одновременно вычитая и прибавляя к полученной разности произведения 4bF , получим
Sx( + ubF) (iA+ibFXx+AbaU,,,(19)
где - вектор ошибок восстановления координат объекта управления.
Поскольку (19) есть дифференциальное уравнение с правой частью, то ошибка (fx будет стремиться к установившейся, если корни характеристичес- 10 кого полинома det() будут располагаться в левой комплексной полуплоскости. Это достигается таким выбором элементов матрицы Ад-КСд, при котором корни указанно- 15 го полинома для всех значений изменяющегося произведения ДЬР будут иметь отрицательную действительную часть.
Величины сопротивлений входных резисторов 107, 112-114 суммирующего 20 интегратора 94 находятся по коэффициентам полинома det(р1-Ад+Ксд), При асимптотически устойчивом полиноме det(,-AbF) установившаяся ошибка будет отличной от ну- 5 ля только для восстановленного 4Т. х, так как cTi О, но
г (1) f ( -л 1
ох Jx ...3), т.е. остальными восстановленными координатами являются производные от приращения натяже- 30 ния Л, ошибки по которым в этом Случае равны нулю. Все это объясняет отсутствие корректирующего сигнала по восстановленному и Т. Демпфирование колебаний объекта управления дос- 35 тигается следующим образом. Из (12) и (13) следует, что
(A.4-bf ) (, ) (A,+bf, )
A,
3
Ьди„
(20)
40
Так как слабость демпфирования объек- ta управления объясняется малым значением V /1, то заменив в (8) и (9) отброшенные слагаемые, содержащие этот множитель, на некоторые другие, можно получить объект с заданным затуханием, уравнение которого будет соответствовать (20). Из (8) и (20) получим
. bf,
.,.
, (21) f,2|4f,. 22)
в этом случае характеристический no-i лином (3)
(23)
Н(р)р + 2 f , + и Из (6а), (9), (29), (23) найдем, что
U)
fJV
т C3
RT
/Bh
f. .,f,i лГх.
01R
/Bh;
ir.
.
/Bh,
(24)
где 2,fl7F
или
о
fo,;
foi 2fuj,f
03
(25)
Из (24) и (25) следует, что коэффициенты усиления сумматора 13 по его входам, соединенным с выходами интеграторов 94, 96 и 98 необходимо выбрать равными f , , f, соответственно,
,Дпя демпфирования колебаний контура натяжения с постоянным коэффициентом $, необходимо выходной сигнал сумматора 13 умножить на величину
40
Эта операция выполняется с помощью множительных устройств 46 - 48, соединенных последовательно. На цифровые входы множительных устройств
46-48 подаются коды величин 3
,
соответственно. Коды
..;:/«
этих величин хранятся в блоках посто янной памяти 43-45. Требуемые значения , выдаются из блоков 43 и 44 постоянной памяти на цифровые входы множительных устройств 46 и 47 при наборе соответствуюп1их адресов требуемь1х значений кодов ширины В и h ленты на тумблерных регистрах 49 и 50 блока 1 задания
При такой замене коэффициентом прис лТ/dil; н (3) будет bf, . Пусть
программы.
41
Код величины 1 /R на цифровой , вход множительного устройства 48 пода 21
ется из блока А5 постоянной памяти, на адресный вход которого поступает код текущего значения раддуса руло на R с выхода блока l коммутации радиуса. Таким образом, сигнал с выхода сумматора 13, поступающий на аналоговый вход множительного устройства 46, умножается на В
и- /2
/RT
/2 Sp 4/3
Кривые зависимости m J /R
от
текущего радиуса рулона и ширины ленты В в относительных единицах пр веделш на фиг. 10 (фиг. 10 соответстет зависимости m от изменяюшихся параметров разматывающего устройства линии поперечной резки рулонной стали. ,.
Из кривых ) видно, что ве
личина m слабо зависит от ширины лен-2о ратора, находящегося на одном валу
ты В, Поэтому при построении узлов 45 и 48 этой зависимостью можно пренебречь,
Сигнал с выхода множительного устройства 48 через операционный усилитель 67 коммутатора 15 подается на .вход сумматора 10. Коэффициент усиления операционного усилителя 67, по
входу связанного с множительным уст- ЗО вого датчика тока, включенного в цепь
ройством 48, равен единице. Кроме того, сигнал с выхода множительного устройства 48 подается на второй вход формирователя 40 сигнала коррекции. Коэффициент усиления наблюдающего устройства по этому входу равен Ь, т.е. выполняется матричная операция () (уравнение 18), или (что то же самое) организуется обрат ная связь наблюдающего устройства по корректирующему сигналу.Таким образом, демпфирование колебаний натяжения ленты в системе повышает надежность ее функционирования, снижает вероятность появления излома. ленты, увеличивает срок работы оборудования, снижает потери в двигателе правильной машины.
Кроме демпфирования колебаний в установившемся режиме размотки, описанные Bbmie средства формирования корректирующего воздействия формирз от сигнал,обеспечивающий дополнительный момент на валу двигателя разматывающего устройства, который сокращает время переходных процессов, компен сируя динамическую составляющую натят жения при разгоне и торможении.
35
40
якоря двигателя правильной мапмны, соединен с вторым входом второго сумматора, выход третьего сумматора через второй регулятор скорости соединен с входом второго токоограни- чи:теля, выход четвертого сумматора через второй регулятор- тока соединен с якорем двигателя разматывающего устройства, выход второго датчика тока, включенного в цепь якоря двигателя разматывающего устройства, соединен с первым входом четвертого сумматора, выход цифроаналогового преобразователя через функциональный 45 преобразователь соединен с первым входом пятого сумматора, выход которого через тиристорный преобразователь соединен с обмоткой возбуждения двигателя разматывающего устройства, выход третьего датчика тока, включенного в цепь обмотки возбуждения двигателя разматывающего устройства, соединен с вторым входом пятого сумматора, отличающаяся тем, что, с целью повышения надежности функционирования и расширения области применения, она дополнительно содеряшт блок задания программы, первый - пятый блоки постоянной памя50
55
22
Формула изобретения
о
1. Система для программного уп- g равлерп я правршьной машиной, содер- :жащая первые и вторые регуляторы ско- |рости, регуляторы тока и токоогра- ничители, первый - третий датчики тока, разматывающее устройство, дви- 0 гатель разматывающего устройства и двигатель правильной машины, первые усилитель и тахогенератор, первый - шестой сумматоры, цифроанало- говый преобразователь, тиристорный 5 преобразователь и задатчик интенсивности разгона и торможения, выход которого соединен с входом первого усилителя и первым входом первого сумматора, вых.од первого тахогенес якорем двигателя правильной машины и правильной машиной, соединен с вторым входом первого сумматора, выход которого через первые регулятор скорости и токоограничитель соединен с первым входом второго сумматора, выход которого через первый регулятор тока соединен с якорем двигателя правильной машины, выход пер-
5
0
якоря двигателя правильной мапмны, соединен с вторым входом второго сумматора, выход третьего сумматора через второй регулятор скорости соединен с входом второго токоограни- чи:теля, выход четвертого сумматора через второй регулятор- тока соединен с якорем двигателя разматывающего устройства, выход второго датчика тока, включенного в цепь якоря двигателя разматывающего устройства, соединен с первым входом четвертого сумматора, выход цифроаналогового преобразователя через функциональный 5 преобразователь соединен с первым входом пятого сумматора, выход которого через тиристорный преобразователь соединен с обмоткой возбуждения двигателя разматывающего устройства, выход третьего датчика тока, включенного в цепь обмотки возбуждения двигателя разматывающего устройства, соединен с вторым входом пятого сумматора, отличающаяся тем, что, с целью повышения надежности функционирования и расширения области применения, она дополнительно содеряшт блок задания программы, первый - пятый блоки постоянной памя0
5
23.
ти, первое - шестое множительные устройства, второй тахогеиератор, KOMt-ty татор, блок коммутации кодов радиуса рулона, измеритель радиуса, второй - четвертый усилители, седьмой сумматор5 причем выход второго тахо- генератора, находящегося на одном валу с якорем двигателя разматывающего устройства и разматывающ1{м устройством, соединен с первым входом третьего сумматора, а через второй усилитель - с первь м входом первого множительного устройства, выход первого усилителя соединен с вторым входом третьего сумматора, выход измерителя радиуса рулона соединен с,первым входом блока коммутации кодов радиу- CSL, выход которого соединен с входом цифроаналогового преобразователя и вторым входом первого множительного устройства, выход первого тахогене- ратора через третий усилитель соединен с первым входом шестого сумматора, второй вход которого соединен с выходом первого множительного устройства, а выход - с первым входом второго множительного устройства, выход релшма блока задания программы .соединен с третьим входом блока коммутации кодов радиуса рулона и управляющим входом коммутатора, первый выход которого соединен с вторым входом четвертого сумматора, выходы задания скорости и минимального радиуса блока задания программы соединены соответственно с входом задатчи- ка интенсивности времени разгона и торможения и вторым входом блока коммутации кодов радиуса рулона, первый выход адреса блока задания программы через первый блок постоянной памяти соедине.н с вторым входом второго множительного устройства, выход которого соединен с первым входом третьего множительного устройства, второй выход адреса блока задания программы через второй блок постоянной памяти соединен с вторым входом третьего множительного устройства, выход которого через четвертый усилитель соединен с первым входом устройства, выход второго то- коограничителя соединен с первым входом коммутатора и входом блока задания программы, выход задания натяжения которого соединен с третьим входом коммутатора, первый - третий выходы устройства соединены с пер32706524
вый - третьим входами седьг-гого сумматора, выход которого соединен с первым входом четвертого множительно.g го устройства, выход четвертого fнo жительного устройства соединен с пер- вЫхМ входом пятого множительного устройства, выход которого соединен с первым входом шестого множз-ттельного
10 устройства, выход шестого множительного устройства соединен с вторыми входами з стройства и коммутатора, второй выход которого соединен с третьим вхо- дом устройства, первый и второй вмхо15 ды адреса блока задания программл и вы ход блока коммутации кодов радиуса рулона через третий - пятый блоки постоянной памяти соединены с вторыми входам четвертого - шестого множи20 тельных устройств соответственно.
2. Система поп.1, отличающаяся тем, что блок задания про граммы содержит первый - четвертый
25 тумблерные регистры, тумблер, группу резисторов и потенциометр, причем нулевой полюс источника питания через размыкаюп1ие контакты первого и второго тумблерных регистров соединен с
30 первым и вторым выходами адреса блока задания пpoгpa tмы соответственно, а через размыкающие контакты третьего тумблерного регистра - с выходом кода шнимaльнoгo радиуса, первый положительный полюс источника питания соединен с замыкающими контактами первого - третьего тумблерных регистров, а через тумблер - с выходом режима блока задания программы, вход
4Q которого через группу резисторов и четвертый тумблерный регистр соединен с выходом задания натяжения блока задания программы, второй положительный полюс источника питания соединен
g через среднюю точку потенциометра
с выходом задания скорости блока зада- . ния программы.
35
3. Система поп.1, отличаю- щ а я с .я тем, что каждое множительное устройство содержит цифроанало- говый преобразователь, операционный усилитель и резистор, причем первый вход множительного устройства соеди- иен с аналоговым входом цифроаналогового преобразователя-, цифровой вход которого соединен с вторым входом множительного устройства, а выход че- рез параллельно соединенные резистор
и операционный усилитель соединен с выходом множительного устройства.
4. Система по п.1, отличающаяся тем, что блок коммутации кода радиуса рулона содержит элемент сравнения, коммутатор, первый и второй одно вибраторы, триггер, элемент И и элемент ИЛИ, причем первый вход блока . коммутации кода радиуса соединен с первым входом схемы сравнения и первым информационным входом коммутатора, выход которого является выходом блока коммутации кода радиуса рулона, второй вход которого соединен с вторым входом схем. сравнения и вторым информационным входом коммутатора третий вход блока коммутации кода радиуса .соединен с входом первого одно- вибратора, выход которого соединен с первым входом элеме ста №1И, первый выход схемы сравнения соединен с вторым входом элемента И, выход которого соединен с вторым входом элемента ИЛИ, выход элемента ИЛИ соеди- иен с первь м входом триггера, второй вход триггера соединен с вторым выходом схемы сравнения, первый выход триггера соединен с первым управ- входом коммутатора, а второй
выход триггера, соединен с вторым уп- равляюгцим входом коммутатора, выход второго одновйбратора соединен с первым входом элемента И.
5„ Система поп,, отлича ю- щ а я с я тем, что коммутатор содержит первый и второй операционные усилител -, реле, первый - четвертый резисторь, причем управляющий вход коммутатора через обмотку реле соединен с нулевым полюсом источника питания, первый вход коммутатора через размыкающий контакт реле соединен с первым выходом коммутатора, второй вход которого через первый резистор соединен с параллельно соединенными вторым .операционным усилителем и четвертым резистором, выход второго операционного уси.аителя через каю1ций контакт реле соединен с первым выходом коммутатора, третий вход коммутатора через параллельно соединенные первый операционный усилитель и второй резистор соединен с вторым выходом коммутатора, вьгкод первого операционного усилителя через третий резистор соединен с входом второго операционного усилителя.
)i.3
Qi.
Блок задания .
nposj}aMMbJ
V//
1
RffS
1.6 -о
1.г
Фиг. 2
PU8.3
тз
S3
2
u
1.5
5
J8
V
60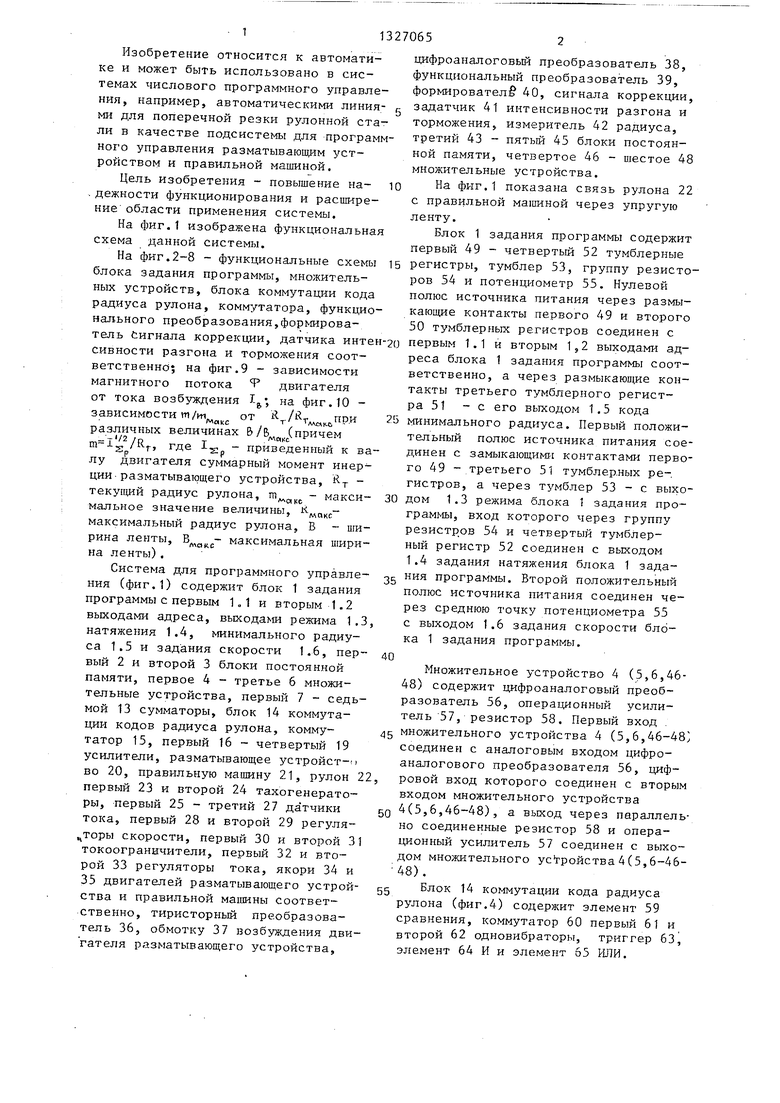

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1985 |
|
SU1298726A1 |
| Двухдвигательный электропривод постоянного тока | 1981 |
|
SU978307A1 |
| Цифровое устройство для программного управления | 1986 |
|
SU1315940A2 |
| Устройство регулирования натяжения полосы в станах холодной прокатки | 1984 |
|
SU1227278A1 |
| Устройство для обучения операторов систем управления электроприводом постоянного тока | 1987 |
|
SU1441443A1 |
| Устройство для регулирования натяжения при намотке длинномерного материала | 1988 |
|
SU1627488A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1988 |
|
SU1501002A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |



Изобретение относится к области автоматики и может быть использовано в системах числового программного управления, например, автоматическими линиями для поперечной резки рулонной стали в качестве подсистемы для программного управления разматывающим устройством и правильной мапшной. Цель изобретения - повышение надежности функционирования и расширение области применения путем обеспечения возможности программного изменения параметров системы управления при изменении параметров обрабатываемого материала. Система содержит блок задания программы, блоки постоянной памяти, шесть множительных устройств, семь сумматоров, блок коммутации кодов радиуса рулона, коммутатор, усилители, разматывающее устройство, правильную машину, первый и второй тахогенераторы, первый-третий датчики тока, первый и второй регуляторы скорости, первый и второй токоограничители, первый и второй регуляторы тока, якорь двигателя правильной машины, якорь двигателя разматывающего устройства, ти- ристорный преобразователь, обмотку возбуждения двигателя разматывающего устройства, цифроаналоговый преобразователь, функциональный преобразователь, формирователь сигнала коррекции, задатчик интенсивности разгона и торможения, измеритель радиуса. В данной системе демпфирование колебаний натяжения ленты повьшта- ет надежность ее функционирования, снижает вероятность появления излома ленты, увеличивает срок работы оборудования, снижает потери в двигателе первичной машины. 4 з.п. ф-лы, 10 ил.
К 79
5 HZD-Kh
V76
fb,
J9
W
Фигл
Фиг. 9
W/nJfiaief
(Риг. 10
Редактор Е.Копча
Составитель И,Швец
Техред В.Кадар Корректор, А.Тяско
Заказ 3388/43Тираж 863Подписное
.ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,
Ь/Ъ„акеО,5
KT/K
макс
| Система программного управления | 1974 |
|
SU516019A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Чиликни М.Г., Ключев В,И., Сандлер А.С | |||
| Теория автоматизированного электропривода, М.: Энергия, 1979 | |||
| Электротехническая промышленность | |||
| Сер | |||
| Электропривод, 1983, вьш | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
