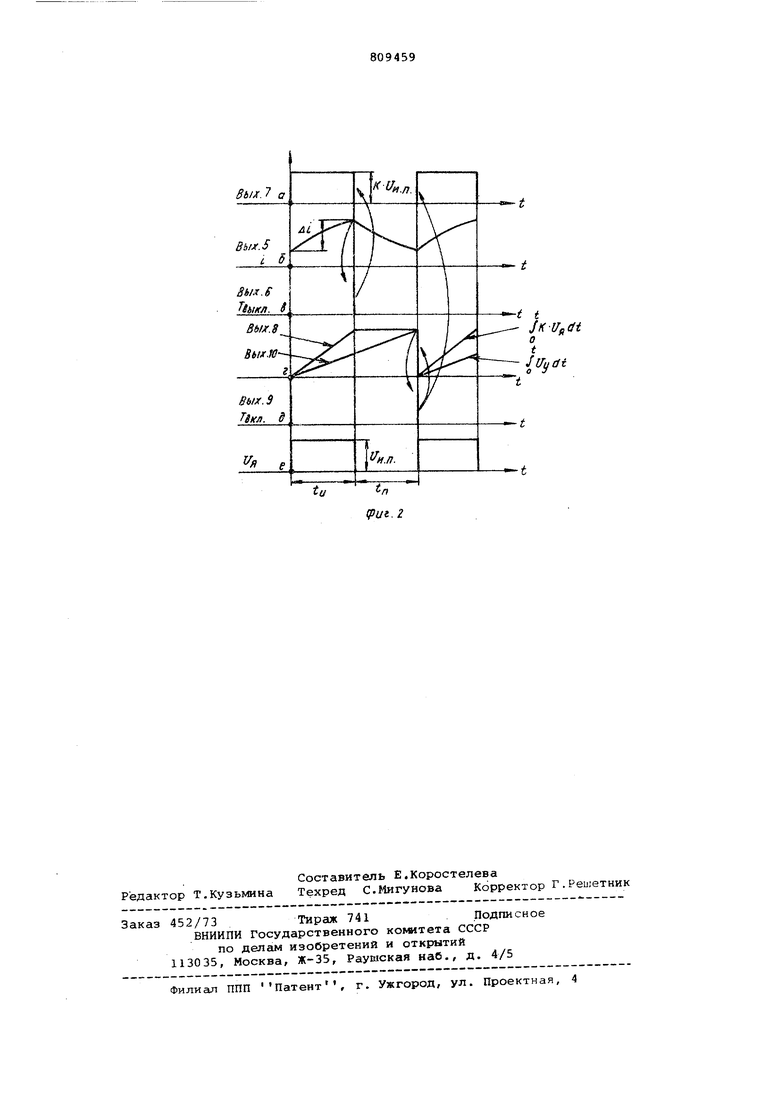
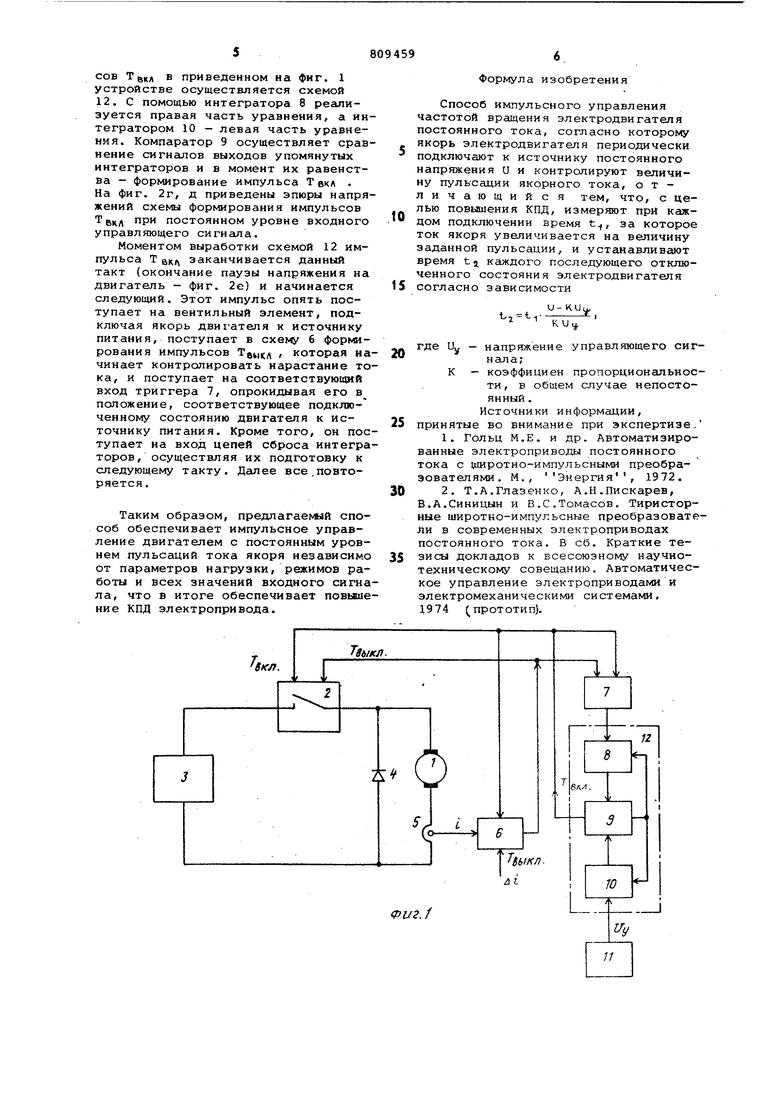
висимо от параметров нагрузки режимов работы и всех значений входного си гн ал а. Поставленная цель достигается те что якорь электродвигателя постоянн го тока периодически подключают к источнику постоянного напряжения U и контролируют величину пульсации якорного тока, измеряя при каждом подключении время t, за которое ток якоря увеличивается на величину заданной пульсации, и устанавливают Бремя tj калгдого последующего отклю ченного состояния электродвигателя согласно зависимости V - к V и - напряженке упргшляющего си ги ал а; -- коэффициент пропорциональностир в общем случае непостоянный . На фиг„ 1 приведено одно из возможных устройств, реализируюадих пре лагаемый способ; на фиг. 2 - диаграммы, поясняющие способ. Устройство состоит из силовой части электропривода и системы управления. Силовая часть включает в себя якорь 1 двигателя постоянного тока,,подключенный через вентильный управляемь й элемент 2 к источнику 3 питания постоянного тока, и диод 4, включенный параллельно якорю ДВИ гателя встречно относительно источн ка питания. Система управления включает в се бя датчик 5 тока якоря, подключенный к входу схемл 6 формирования импуль сов выключения вентильного элемента триггер 7 с раздельным запуском, выход которого через интегратор 8 подключен к одному из входов компаратора 9, другой вход которого через интегратор 10 соединен с источником 11 входного управляющего сигнала.Выход упомянутого компаратора подключе к входным цепям сброса интегратора 8 и 10. При этом элементы 8, 9 и 10 образуют схему 12 формирования импульсов включения вентильного элемента. Выходы схем 6 и 12 (выход ком паратора 9) подключены к входам вентильного элемента 2 и к входам триггера 7, а выход схема 12, кроме того подключен еще и к одному из входов схемы 6. Способ иллюстрируется на примере работы электропривода, показанного на фиг. 1. Работа электропривода начинается с момента выработки схемой 12 импуль са включения вентильного элемента 2 Ь(.1 (фиг. 2д) . Этим импульсом открывается вентильный элемент 2, подключая тем caivMM якорь 1 двигателя к источнику 3 питания, и опрокидывается триггер 7 в положение, соответствующее подключенному состоянию якоря 1 к источнику 3 (фиг. 2а,е). При этом ток якоря гателя под действием разности (сумь«) напряжения источника 3 и ЭДС якоря 1 двигателя {U,,f, - ) начинает нарастать (фиг. 2б) . Кроме того, импульс Т акА поступает в схему 6 формирователя импульсов Тдццд (фиг. 1), которая с этого момента начинает измерение нарастания тока якоря, сигнсш которого поступает с датчика 5 тока (фиг. 2б). При увеличении тока якоря на заранее заданную величину д1 схема 6 вырабатывает импульс выключения вентильного элемента Тдукл (Фиг. 2б,в) . Этим импульсом запирается вентильный элемент 2, отключая якорь двигателя от источника питания (ток якоря при этом замыкается в шунтирующий диод 4 фиг. 26,е) и в соответствующее состояние опрокидывается триггер 7 (фиг. 2а}. Моментом формирования импульса Твынл определяется длительность импульса напряжения на якоре двигателя tu (что соответствует длительности импульса выхода триггера 7 - фиг. 2а, е). На этом работа схемы формирования импульса Т ВЫКА данном такте заканчивается. Длительность паузы tn напряжения на двигателе (фиг. 2е) определяется моментом формирования схемой 12 импульса ТвхА (фиг. 2д) . Соотношение длительностей импульса и паузы напряжения на двигателе определяет величину среднего значения напряжения на нем, которая в свсяо очередь тем или иным образом задается входным управляющим сигналом. В устройстве, приведенном на фиг. 1, реализуется пропорциональная зависимость между средним за период напряжением на якоре двигателя и средним за период напряжением управляющего сигнала. В этом случае момент формирования импульса включения вентильного элемента определяется следующей функциональной зависимостью: .if V rtлiru bii l - -€ l- tu П о J j Uu.ndt, де К - коэффициент пропорциональности . Уравнение отражает, что момент орьшрования импульса (или длиельность паузы) определяется моентом равенства левой и правой часей уравнения. Формирование импульсов т в,(л в приведенном на фиг. 1 устройстве осуществляется схемой 12. С помощью интегратора 8 реализуется правая часть уравнения, а интегратором 10 - левая часть уравнения. Компаратор 9 осуществляет сравнение сигналов выходов упомянутых интеграторов и в момент их равенства - формирование импульса Т вкл . На фиг. 2г, д приведены эпюры напряжений схемы формирования импульсов Т Вкл Р постоянном уровне входного управляющего сигнала. Моментом выработки схемой 12 импульса Т вц, заканчивается данный такт (окончание паузы напряжения на двигатель - фиг. 2е) и начинается следующий. Этот импульс опять поступает на вентильный элемент, подключая якорь двигателя к источнику питания, поступает в схему 6 формирования импульсов ,(д , которая на чинает контролировать нарастание то ка, и поступает на соответствующий вход триггера 7, опрокидывая его в положение, соответствующее подклгоченному состоянию двигателя к источнику питания. Кроме того, он пос тупает на вход цепей сброса интегра торов, осуществляя их подготовку к следующему такту. Далее все.повторяется . Таким образом, предлагаемый способ обеспечивает импульсное управление двигателем с постоянным уровнем пульсаций тока якоря независимо от параметров нагрузки, режимов работы и всех значений входного сигна ла, что в итоге обеспечивает повыше ние КПД электропривода. Формула изобретения Способ импульсного управления частотой вращения электродвигателя постоянного тока, согласно которому якорь электродвигателя периодически подключают к источнику постоянного напряжения и и контролируют величину пульсации якорного тока, отличающийся тем, что, с целью повьаиения КПД, измеряют при каждом подключении время t, за которое ток якоря увеличивается на величину заданной пульсации, и устанавливают время tj каждого последующего отключенного состояния электродвигателя согласно зависимости и- KUu. Ъ, i. 1- I где Uy - напряжение управляющего сигнала;К - коэффициен пропорциональности, в общем случае непостоянный . Источники информации, принятые во внимание при экспертизе., 1.Гольц М.Е. и др. Автоматизированные электроприводы постоянного тока с ишротно-импульсными преобразователями. М., Энергия, 1972. 2.Т.А.Глазенко, А.Н.Пискарев, В.А.Синицын и В.С.Томасов. Тиристорные широтно-импульсные преобразователи в современных электроприводах постоянного тока. В сб. Краткие тезисы докладов к всесоюзному научнотехническому совещанию. Автоматическое управление электроприводами и электромеханическими системами, 1974 (прототип).
Вых. 7
t
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1984 |
|
SU1257770A1 |
| Электропривод переменного тока | 1989 |
|
SU1757041A1 |
| СПОСОБ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2003 |
|
RU2256286C1 |
| Способ управления электроприводом постоянного тока дебалансного виброисточника и устройство для его осуществления | 1983 |
|
SU1144065A1 |
| Датчик сил упругой деформации механизма и устройство для его настройки | 1985 |
|
SU1288511A1 |
| Электропривод постоянного тока | 1986 |
|
SU1317626A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2012991C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1997 |
|
RU2123230C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ОДНОФАЗНОГО КОЛЛЕКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ ПОВЫШЕННОЙ НАДЕЖНОСТИ | 2014 |
|
RU2568816C1 |
| Вентильный электропривод постоянного тока | 1976 |
|
SU657561A1 |