112
Изобретение предназначено для . контроля нагружения и демпфирования упругих колебаний электроприводных механизмов и машин, имеющих в кинематической цепи упругие конструк- тивные элементы, и может быть использовано, например, для управления электроприводами мощных машин и механизмов в прокатном производстве, горной и других отраслях промышленности
Цель изобретения - повьшение точности датчика и повышение точности и быстродействия устройства для настройки датчика.
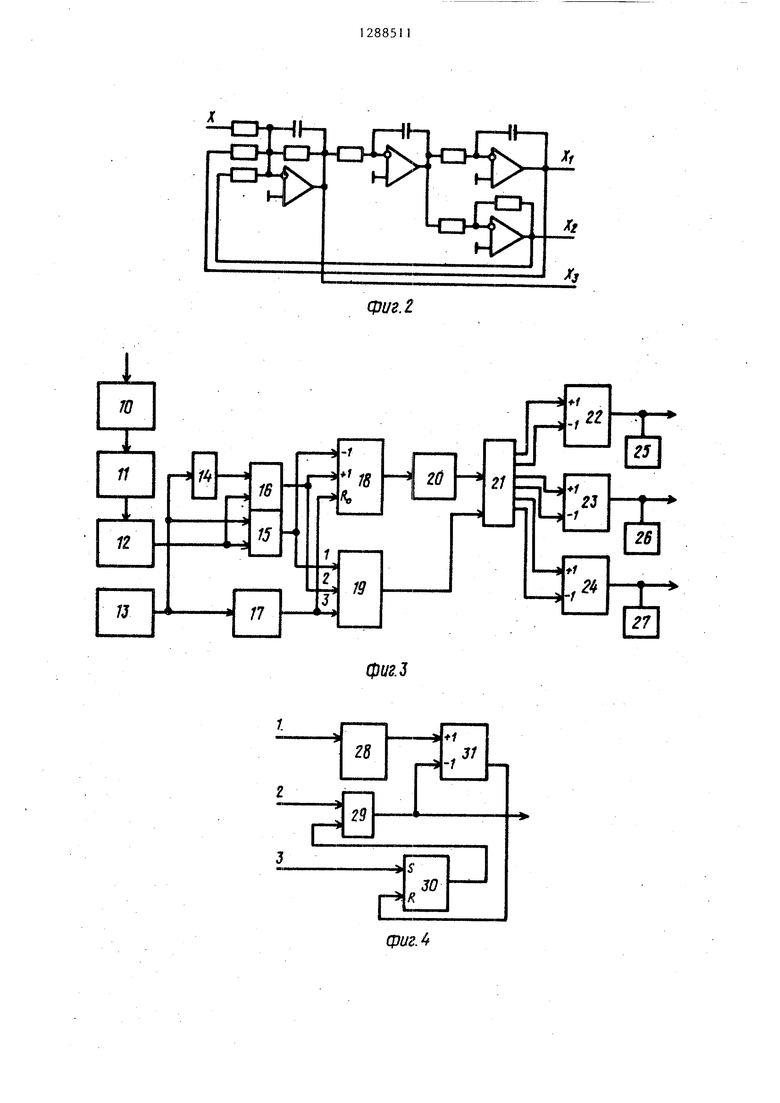
На фиг.1 представлена функциональная блок-схема датчика; на фиг,2 - схема универсального фильтра третьего порядка; на фиг.З - функциональная схема устройства для настройки датчика; на фиг.4 - схема, генератора пакета импульсов; на фиг.5 - временные диаграммы процессов при настройке.
Собственно датчик (фиг.1) содер- жит первичные датчики 1 и 2 тока и напряжения, универсальные фильтры 3 и 4 третьего порядка, цифроуправ- ляемые резисторы 5-7, сумматоры 8 и
фиксатор 9 кодов.
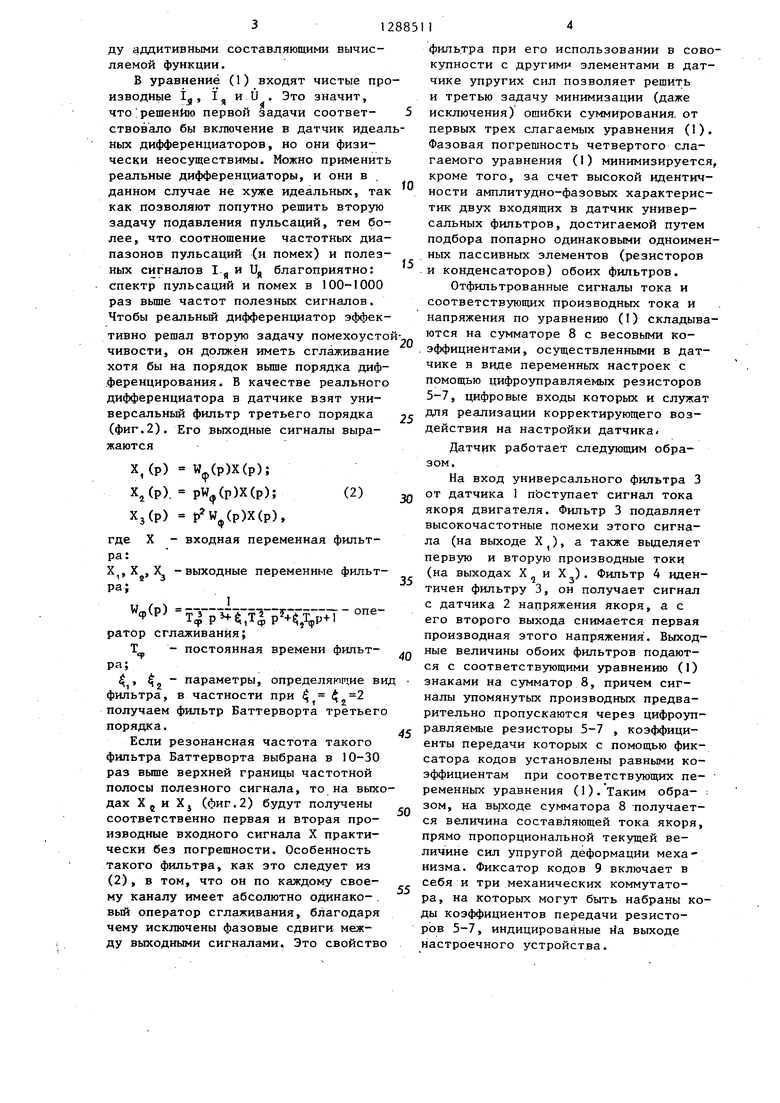
Универсальный фильтр третьего порядка является известным и образован из четырех операционных усилителей, один из которых собран по схеме инерционного звена с тремя входами, а другие - по схеме интеграторов и инвертора. Фильтр имеет один вход X и три выхода Х , Х., Х, причем сигнал Х представляет собой сглаженный
входной сигнал; X - сглаженная первая производная входного сигнала; . X J - сглажен ная вторая производная входного сигнала (фиг.2).
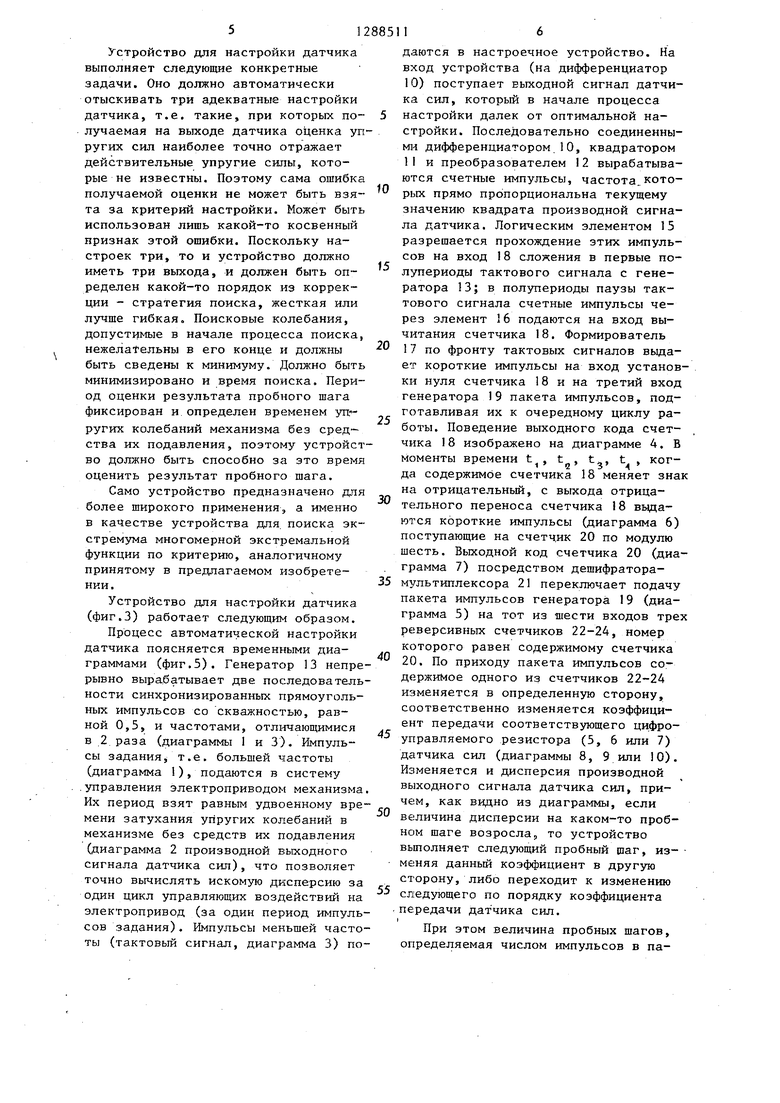
Устройство для настройки датчика представлено его функциональной схемой на фиг.З. В него входят дифференциатор 10, квадратор 11, преобразователь 12 напряжение-частота, генератор 13 синхроимпульсов, инвертор 14, два элемента И 15 и 16, формирователь 17 короткого импульса, реверсивный двоичный счетчик 18, генератор 19 пакета импульсов, двоичньй счетчик 20 по модулю шесть,, дешифратор-мультиплексор 21, ревер- сивные двоичные счетчики 22-24 и ин дикаторь кода 25-27.
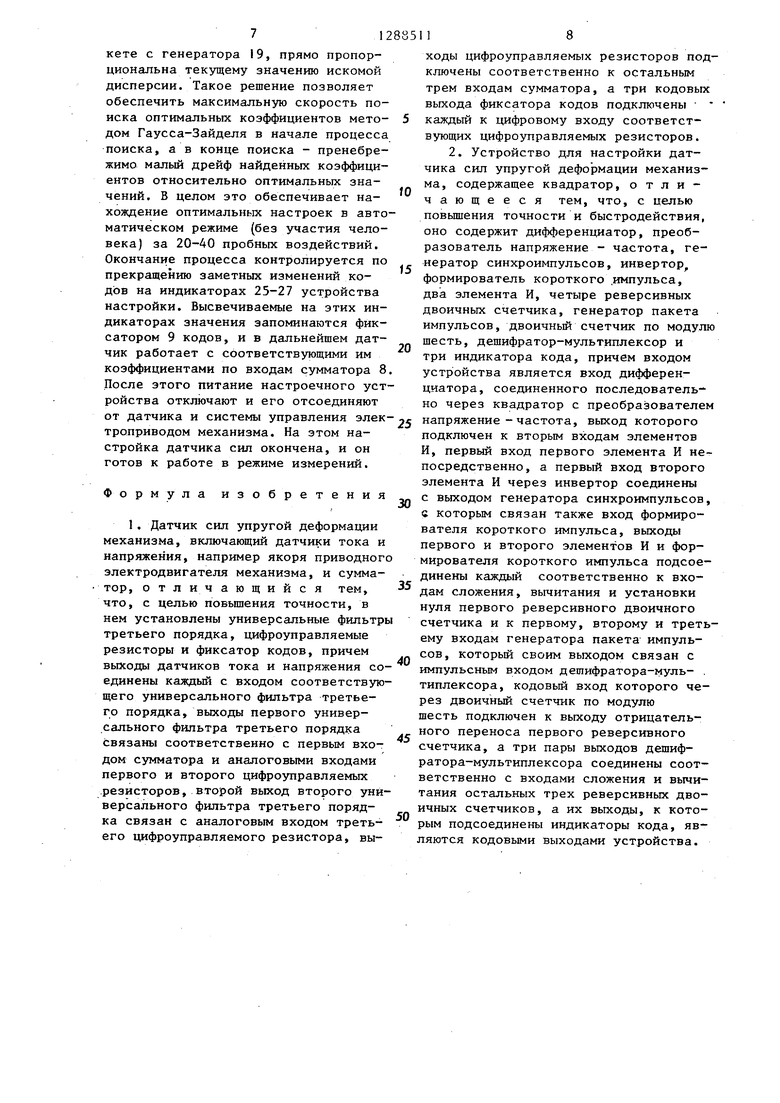
Нестандартный узел устройства - генератор 19 пакета импульсов пока
12
зан на фиг.4. Он состоит, из делителя 28 частоты, элемента И 29, SR- триггера 30 и двоичного реверсивного счетчика 31. Этот генератор предназначен для выдачи пакета импульсов и тот момент времени, когда внешние импульсы начинают поступать на его второй вход, причем количество вьща- ваемых в пакете импульсов равно числу импульсов, ранее поступивших на его первый вход, поделенному на коэффициент делителя 28 частоты. Импульсом по третьему входу генератор подготавливается к следующему циклу работы.
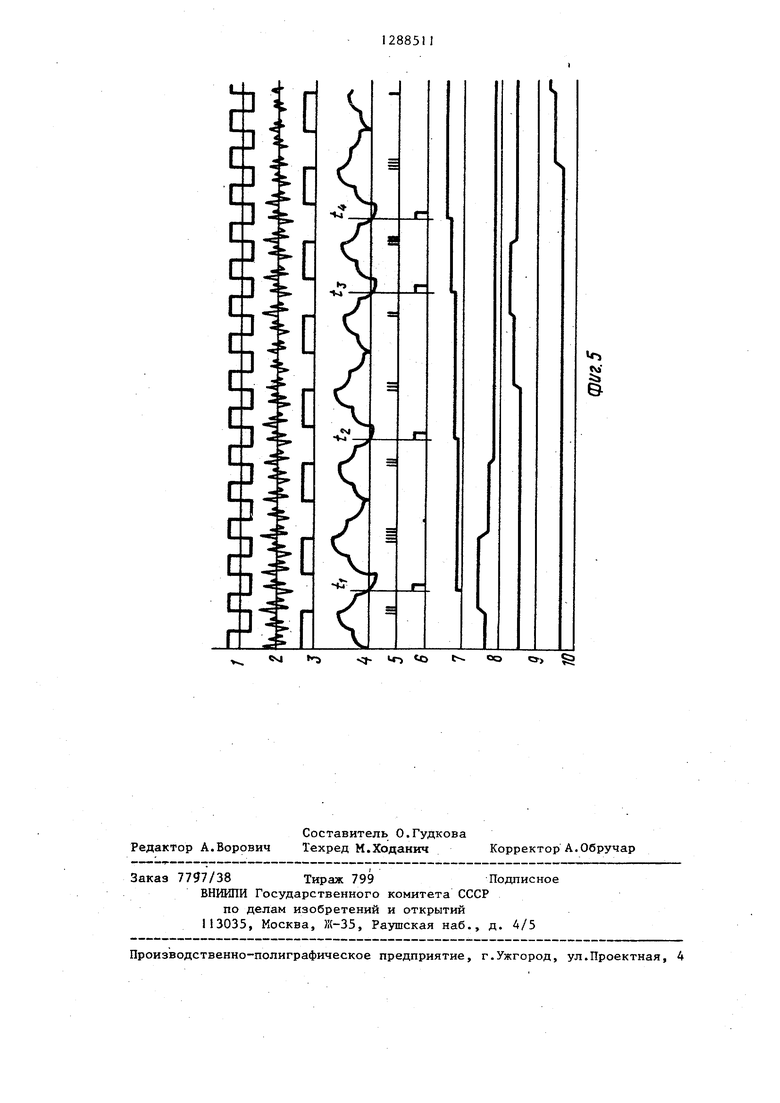
На фиг.5 изображены временные диаграммы процессов.при настройке датчика.
Косвенное определение оценки упругих сил в датчике осуществляется путем вычисления по полному уравнению для этих сил, получаемому из уравнений равновесия ЭДС и движения якоря электродвигателя постоянного тока, в виде
1,(Р) (Т Вр +Вр+1) т (р) -|;ри,(р)
(I)
5
0
п ,
где 1„ (р) - статический ток двигателя, являюпщйся адекватной оценкой сил упругой деформации механизма; Т , В - электромагнитная и электромеханическая постоянные времени двигателя с учетом первой массы многомассового механизма; R- - активное сопротивление якорной цепи двигателя. Полнота уравнения (1) сама по себе не обеспечивает достижения цели изобретения. Для точного вычисления по этому уравнению необходимо еще решить следующие три задачи:
1.Возможно точное получение самих производных.
2.Подавление пульсаций тока и напряжения, порождаемых процессами коммутации в коллекторе машины постоянного тока и вентильном преобразователе , что предотвратит такйсе их развитие в производных уравнения (1).
3.Минимизация ошибки суммирования по уравнению (1), для чего необходимо исключить фазовые сдвиги меж
ДУ аддитивными составляющими вычисляемой функции.
В уравнение (1) входят чистые производные ij,, 1 и и . Это значит, что;решению первой задачи соответ- ствовало бы включение в датчик идеалных дифференциаторов, но они физически неосуществимы. Можно применить реальные дифференциаторы, и они в данном случае не хуже идеальных, так как позволяют попутно решить вторую задачу подавления пульсаций, тем более, что соотношение частотных диапазонов пульсаций (и помех) и полезных сигналов I я и Uj, благоприятно: спектр пульсаций и помех в 100-1000 раз Bbmie частот полезных сигналов. Чтобы реальный дифференциатор эффективно решал вторую задачу помехоусточивости, он должен иметь сглаживание хотя бы на порядок вьщ1е порядка дифференцирования. В качестве реального дифференциатора в датчике взят универсальный фильтр третьего порядка (фиг.2). Его выходные сигналы выражаются
X, (р) W(p)X(p);
Xjp). pW(p)X(p); (2)
ХЗ(Р) (p)X(p),
где X - входная переменная фильтра:
Х,Х ,Х -выходные переменные фильтра;
wq,(p) f ii;-gi-f - oneратор сглаживания;
Т - постоянная времени фильт- ра;
J , - параметры, определяющие ви фильтра, в частности при 2 получаем фильтр Баттерворта третьего порядка.
Если резонансная частота такого фильтра Баттерворта выбрана в 10-30 раз выше верхней границы частотной полосы полезного сигнала, то на выходах Xj и Xj (фиг.2) будут получены соответственно первая и вторая производные входного сигнала X практически без погрешности. Особенность такого фильтра, как это следует из (2), в том, что он по каждому своему каналу имеет абсолютно одинако- . вый оператор сглаживания, благодаря чему исключены фазовые сдвиги между выходными сигналами. Это свойство
O
5
5
0
5
5
фильтра при его использовании в совокупности с другими элементами в датчике упругих сил позволяет решить и третью задачу минимизации (даже исключения) ошибки суммирования, от первых трех слагаемых уравнения (1). Фазовая погрешность четвертого слагаемого уравнения (I) минимизируется, кроме того, за счет высокой идентичности амплитудно-фазовых характеристик двух входящих в датчик универсальных фильтров, достигаемой путем подбора попарно одинаковыми одноименных пассивных элементов (резисторов и конденсаторов) обоих фильтров.
Отфильтрованные сигналы тока и соответствующих производных тока и напряжения по уравнению (I) складываются на сумматоре 8 с весовыми ко- . эффициентами, осуществленными в датчике в виде переменньпс настроек с помощью цифроуправляемых резисторов 5-7, цифровые входы которых и служат для реализации корректирующего воздействия на настройки датчика«
Датчик работает следующим образом.
На вход универсального фильтра 3 от датчика 1 п оступает сигнал тока якоря двигателя. Фильтр 3 подавляет высокочастотные помехи этого сигнала (на выходе X ), а также вьщеляет первую и вторую производные токи (на выходах Х и X ). Фильтр 4 идентичен фильтру 3, он получает сигнал с датчика 2 напряжения якоря, а с его второго выхода снимается первая производная этого напряжения. Выходные величины обоих фильтров подаются с соответствующими уравнению (1) знаками на сумматор 8, причем сигналы упомянутых производных предварительно пропускаются через цифроуп- равляемые резисторы 5-7 , коэффициенты передачи которых с помощью фиксатора кодов установлены равными коэффициентам при соответствующих пе- ременных уравнения (1). Таким обра- : зом, на выходе сумматора 8 -получается величина составляющей тока якоря, прямо пропорциональной текущей величине сил упругой деформации механизма. Фиксатор кодов 9 включает в себя и три механических коммутатора, на которых могут быть набраны коды коэффициентов передачи резисторов 5-7, индицированные ria выходе настроечного устройства.
Устройство для настройки датчика выполняет следующие конкретные задачи. Оно должно автоматически отыскивать три адекватные настройки датчика, т.е. такие, при которых получаемая на выходе датчика оценка упругих сил наиболее точно отражает действительные упругие силы, которые не известны. Поэтому сама ошибка получаемой оценки не может быть взята за критерий настройки. Может быть использован лишь какой-то косвенный признак этой ошибки. Поскольку настроек три, то и устройство должно иметь три выхода, и должен быть определен какой-то порядок из коррекции - стратегия поиска, жесткая или лучше гибкая. Поисковые колебания, допустимые в начале процесса поиска, нежелательны в его конце и должны быть сведены к минимуму. Должно быть минимизировано и время поиска. Период оценки результата пробного шага фиксирован и определен временем упг- ругих колебаний механизма без средства их подавления, поэтому устройство должно быть способно за это время оценить результат пробного шага.
Само устройство предназначено для более широкого применения, а именно в качестве устройства для поиска экстремума многомерной экстремальной функции по критерию, аналогичному принятому в предлагаемом изобретении.
Устройство для настройки датчика (фиг.З) работает следующим образом. Процесс автоматической настройки датчика поясняется временными диаграммами (фиг.5). Генератор 13 непрерывно вырабатывает две последовательности синхронизированных прямоугольных импульсов со скважностью, равной 0,5, и частотами, отличающимися в 2 раза (диаграммы I и 3). Импульсы задания, т.е. большей частоты (диаграмма 1), подаются в систему .управления электроприводом механизма Их период взят равным удвоенному времени затухания упругих колебаний в механизме без средств их подавления (диаграмма 2 производной вькодного сигнала датчика сил), что позволяет точно вычислять искомую дисперсию за один цикл управляющих воздействий на электропривод (за один период импульсов задания). ИмпульсЬ меньшей частоты (тактовый сигнал, диаграмма 3) по
. Ш
5
20
25
30
35
40
45
50
55
I6
даются в настроечное устройство. На вход устройства (на дифференциатор 10) поступает выходной сигнал датчика сил, который в начале процесса настройки далек от оптимальной настройки. Последовательно соединенными дифференциатором 10, квадратором
IIи преобразователем 12 вырабатываются счетные импульсы, частота.которых прямо пропорциональна текущему значению квадрата производной сигнала датчика. Логическим элементом 15 разрешается прохождение этих импульсов на вход 18 сложения в первые полупериоды тактового сигнала с генератора 13; в полупериоды паузы тактового сигнала счетные импульсы через элемент 16 подаются на вход вычитания счетчика 18. Формирователь
17 по фронту тактовых сигналов выдает короткие импульсы на вход установки нуля счетчика 18 и на третий вход генератора 19 пакета импульсов, подготавливая их к очередному циклу работы. Поведение выходного кода счетчика 18 изображено на диаграмме 4. В Моменты времени t , t , t,, t , когда содержимое счетчика 18 меняет знак на отрицательный, с выхода отрицательного переноса счетчика 18 выдаются короткие импульсы (диаграмма 6) поступающие на счетчик 20 по модулю шесть. Выходной код счетчика 20 (диаграмма 7) посредством дешифратора- мультиплексора 21 переключает подачу пакета импульсов генератора I9 (диа- Г1)амма 5) на тот из шести входов трех реверсивных счетчиков 22-24, номер которого равен содержимому счетчика 20. По приходу пакета импульсов содержимое одного из счетчиков 22-24 изменяется в определенную сторону, соответственно изменяется коэффициент передачи соответствующего цифро- управляемого резистора (5, 6 или 7) датчика сил (диаграммы 8, 9 или 10). Изменяется и дисперсия производной выходного сигнала датчика сил, причем, как видно из диаграммы, если величина дисперсии на каком-то пробном шаге возросла, то устройство выполняет следующий пробный шаг, из- меняя данный коэффициент в другую сторону, либо переходит к изменению следующего по порядку коэффициента
передачи датчика сил. I
При этом величина пробных шагов,
определяемая числом импульсов в па712
кете с генератора 19, прямо пропорциональна текущему значению искомой дисперсии. Такое решение позволяет обеспечить максимальную скорость поиска оптимальных коэффициентов мето- дом Гаусса-Зайделя в начале процесса поиска, а в конце поиска - пренебрежимо малый дрейф найденных коэффициентов относительно оптимальных значений. В целом это обеспечивает на- хождение оптимальных настроек в автоматическом режиме (без участия человека) за 20-40 пробных воздействий. Окончание процесса контролируется по прекращению заметных изменений кодов на индикаторах 25-27 устройства настройки. Высвечиваемые на этих индикаторах значения запоминаются фиксатором 9 кодов, и в дальнейшем датчик работает с соответствующими им коэффициентами по входам сумматора 8 После этого питание настроечного устройства отключают и его отсоединяют от датчика и системы управления электроприводом механизма. На этом настройка датчика сил окончена, и он готов к работе в режиме измерений.
Формула изобретения
,1. Датчик сил упругой деформации механизма, включающий датчики тока и напряжения, например якоря приводного электродвигателя механизма, и сумматор, отличающийся тем, что, с целью повьштення точности, в нем установлены универсальные фильтры третьего порядка, цифроуправляемые резисторы и фиксатор кодов, причем выходы датчиков тока и напряжения со единены каждый с входом соответствующего универсального фильтра третьего порядка, выходы первого универсального фильтра третьего порядка связаны соответственно с первым входом сумматора и аналоговыми входами первого и второго цифроуправляемых .резисторов, второй выход второго универсального фильтра третьего порядка связан с аналоговым входом треть его цифроуправляемого резистора, вы
8
- 5 а оо 8. т15
20
25
30
,40
го ы 45
50
ходы цифроуправляемых резисторов подключены соответственно к остальным трем входам сумматора, а три кодовых выхода фиксатора кодов подключены каждый к цифровому входу соответствующих цифроуправляемых резисторов. 2. Устройство для настройки датчика сип упругой деформации механизма, содержащее квадратор, отличающееся тем, что, с целью повышения точности и быстродействия, оно содержит дифференциатор, преобразователь напряжение - частота, генератор синхроимпульсов, инвертор, формирователь короткого .импульса, два элемента И, четыре реверсивных двоичных счетчика, генератор пакета импульсов, двоичный счетчик по модулю шесть, дешифратор-мультиплексор и три индикатора кода, причем входом устройства является вход дифференциатора, соединенного последовательно через квадратор с преобразователем напряжение - частота, выход которого подключен к вторым входам элементов И, первый вход первого элемента И непосредственно, а первый вход второго элемента И через инвертор соединены с выходом генератора синхроимпульсов, в которым связан также вход формирователя короткого импульса, выходы первого и второго элементов И и формирователя короткого импульса подсоединены каждый соответственно к входам сложения, вычитания и установки нуля первого реверсивного двоичного счетчика и к первому, второму и третьему входам генератора пакета импульсов, которьй своим выходом связан с импульсным входом дешифратора-муль- , типлексора, кодовый вход которого через двоичный счетчик по модулю шесть подключен к выходу отрицательного переноса первого реверсивного счетчика, а три пары выходов дешифратора-мультиплексора соединены соответственно с входами сложения и вычитания остальных трех реверсивных двоичных счетчиков, а их выходы, к которым подсоединены индикаторы кода, являются кодовыми выходами устройства.
Xi
Фиг.г
фиг.з
28
-1
31
фиг. 4
rj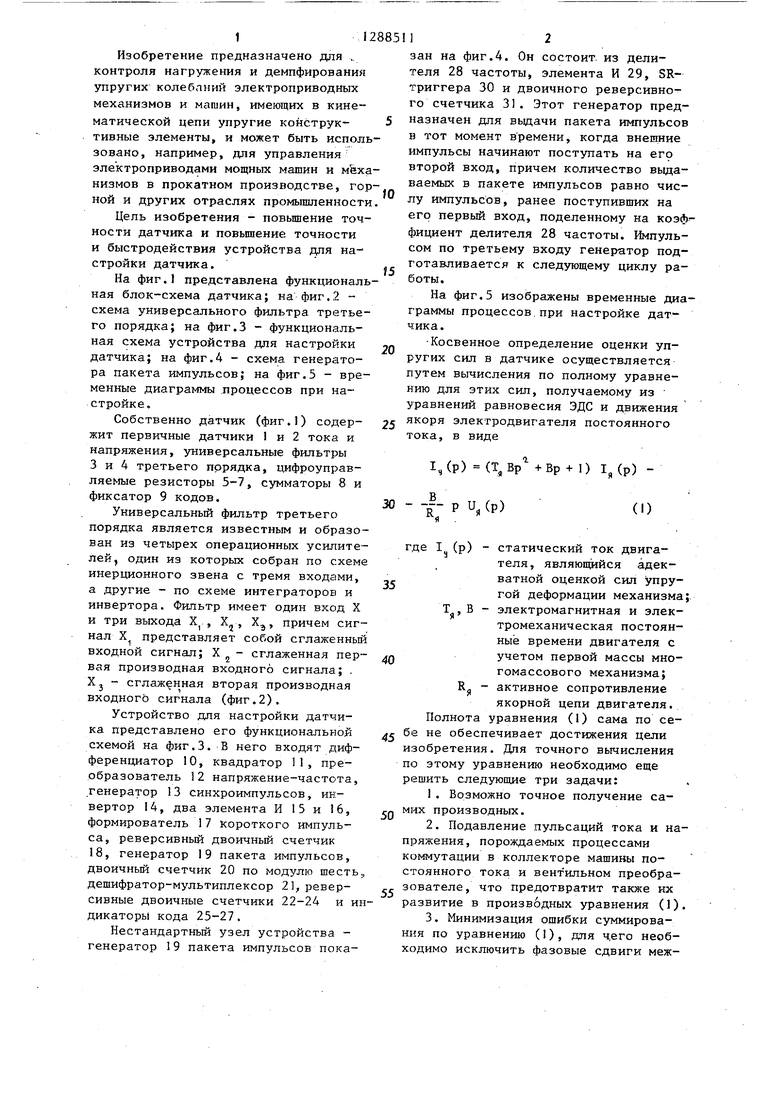
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналого-цифровое множительное устройство | 1980 |
|
SU883930A1 |
| Устройство для управления статическим тиристорным компенсатором | 1985 |
|
SU1309175A1 |
| Устройство для измерения артериального давления крови | 1985 |
|
SU1308316A1 |
| Устройство для компенсации реактивной мощности | 1986 |
|
SU1347118A1 |
| Решающий блок аналогового процессора | 1988 |
|
SU1667114A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2006 |
|
RU2306611C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2006 |
|
RU2308038C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2006 |
|
RU2325662C1 |
| Устройство для синхронизации системы управления вентильным преобразователем | 1988 |
|
SU1697210A1 |
Изобретения предназначены для контроля нагружения и демпфирования упругих колебаний электроприводных механизмов с упругими кинематическими звеньями и могут быть применены для управления их электроприводами. Целью изобретения является повышение точности и быстродействия. Датчик построен с учетом погрешностных факторов и динамики, по уравнению которой и происходит вычисление измеряемой величины путем сложения с весовыми коэффициентами тока, его первых двух производных и производной напряжения якоря. Все слагаемые получаются и сглаживаются с помощью двух универсальных фильтров 3, 4с одинаковой фазовой погрешностью, минимизирующей ошибку сложения. На входы этих фильтров 3, 4 подаются ток и напряжение якоря двигателя со своих датчиков 1, 2. Слагаемые с производными пропускаются на сумматор 8 через циф- роуправляемые резисторы 5, 6, 7, ПОЗ-Q воляющие по своему цифровому входу корректировать весовые коэффициенты сложения. Лри настройке датчика с этими входами сопрягается анапого- кодовое настроечное устройство, которое вычисляет дисперсию производной оценки упругих сил, пробными воздействиями на настройки датчика отыскивает ее минимум и по его координатам указывает на индикаторах адекватные настройки датчика, которые и выставляются после завершения настройки и удаления настроечного устройства. 2 с.п. ф-лы, 5 ил. i (Л to 00 00 ел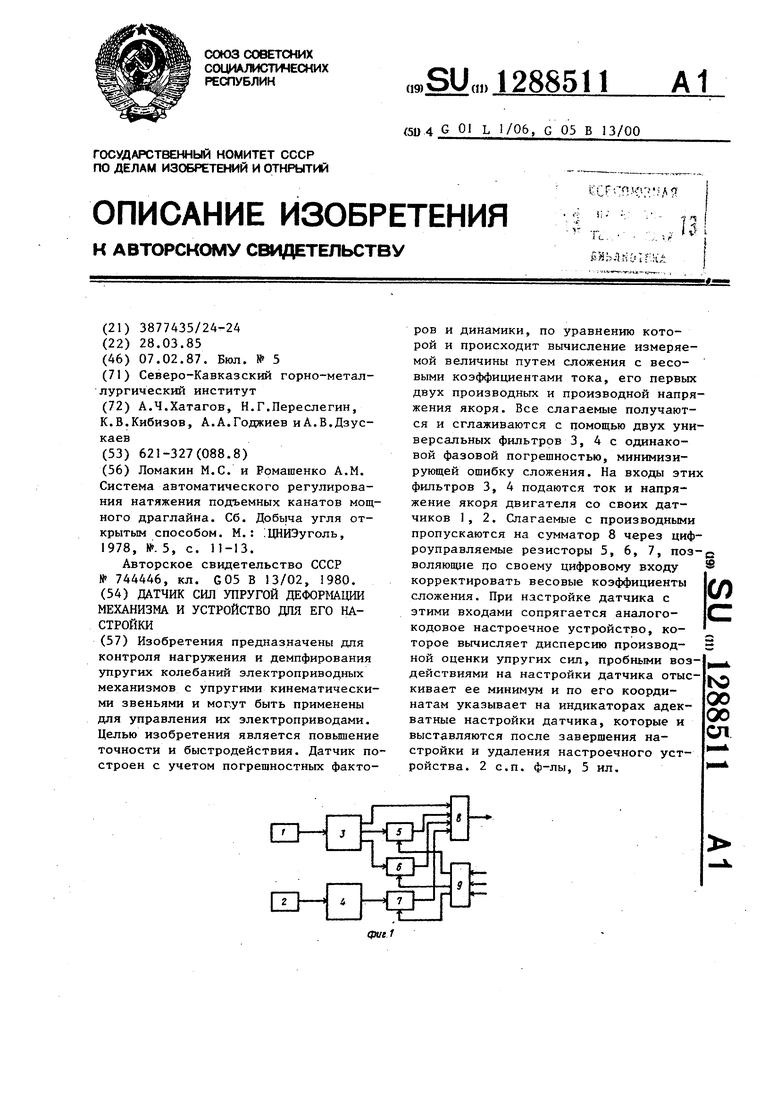
Г
Ча
Csjbrj j.i4-)
Составитель О.Гудкова Редактор А.Ворович Техред М.Ходанич Корректор А.Обручар
Заказ 7797/38 Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Ломакин М.С | |||
| и Ромашенко A.M | |||
| Система автоматического регулирования натяжения подъемных канатов мощного драглайна | |||
| Сб | |||
| Добыча угля открытым способом | |||
| М.: :ЦНИЭуголь, 1978, № | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Насос | 1917 |
|
SU13A1 |
| Самонастраивающаяся система управления | 1978 |
|
SU744446A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
