(54) СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК АНАЛОГО-ЦИФРОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения динамическихХАРАКТЕРиСТиК АНАлОгО-цифРОВыХ пРЕОбРАзО-ВАТЕлЕй | 1979 |
|
SU815897A1 |
| Устройство для определения динамическихХАРАКТЕРиСТиК пРЕОбРАзОВАТЕлЕй | 1979 |
|
SU838612A1 |
| Аналого-цифровой преобразователь последовательного уравновешивания | 1981 |
|
SU1030965A1 |
| Аналого-цифровой преобразователь | 1981 |
|
SU970680A1 |
| Аналого-цифровой преобразователь считывания | 1977 |
|
SU677097A1 |
| Многоканальный аналого-цифровой преобразователь | 1980 |
|
SU993468A1 |
| Способ аналого-цифрового преобразования и устройство для его осуществления | 1979 |
|
SU964981A1 |
| Устройство для испытаний аналоговых функциональных элементов автоматических систем | 1987 |
|
SU1411712A1 |
| Устройство для измерения амплитуды одиночных импульсных сигналов | 1980 |
|
SU960644A1 |
| Устройство для измерения максимального значения сигналов | 1977 |
|
SU739424A1 |
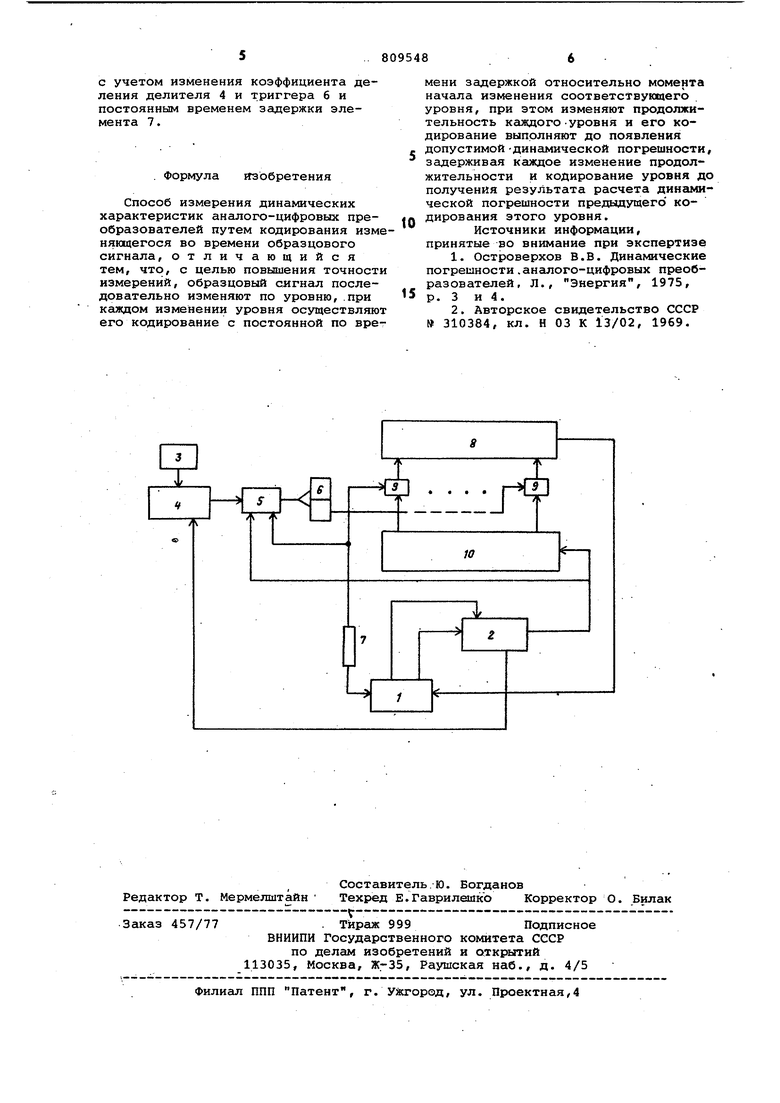
Изобретение относится к цифровой измерительной технике и может быть использовано для измерения динамических характеристик аналого-цифровых преобразователей (АЦП) и их метрологическую аттестацию в динамическом режиме независимо от принципа действия АЦП- как с постоянной так и с .переменной длительностью цикла преобразования. Известен метод анализа диаграмм состояний, при котором определяют запаздывание и динамическую погрешность АЦП в зависимости от скорости изменения входного сигнеша Ll. Недостатком метода является сложность, обусловленная необходимостью использования набора опорных сигнало изменяющихся с различной скоростью. Известен также способ измерения динамических характеристик АЦП,при котором скачкообразно по времени изменяют входной сигнал, каждый раз с менякицейся задержкой относительно начала скачка сигнала фиксируют выходной код после окончания цикла преобразования непосредственно по регистрируннцему устройству АЦП 12 . Однако способ имеет невысокую точность измерений, обусловленную изменением входного сигнала за время преобразования. Цель изобретения - повышение точности измерений. Поставленная цель достигается тем, что в способе измерения динамических характеристик аиалого-цифровых преобразователей путем кодирования изменяющегося во времени образцового сигнала, образцовый сигнал последовательно изменяют по уровню, при каждом изменении уровня осуществляют его кодирование с постоянной по времени задержкой относительно момента начала ийманения соответствующего уровня, при зтом изменяют пЕ(рдолжительность каждого уровня и его кодирование выполняют до появления допустимой динамической погрешности, задерживая каждое изменение продолжительности и кодирование уровня до получения результата расчета дингилической погрешностипредьщуще го кодирования этого уровня. Схема предлагаемого устройства представлена на чертеже . Устройство содержит АЦП 1, блок 2 обработки, генератор 3 тактовых импульсов образцовой частоты, управляемый делитель - 4 частоты следования сигналов, ключевой элемент 5, триггер 6, элемент 7 временной задержки, преобразователь кода, например единичного (ПККН), в образцовое напряжение 8, элементы 9 И и распределитель 10 сигналов.
Устройство работает следующим образом
В.исходном состоянии ключевой элемент 5 закрыт, сигналы всех §ыходов распределителя 10 блокируют элементы 9 И,чем исключается передача сигналов управления, формируемых триггером б, на входы всех разрядов ПЕКН 8. ПБКН по сигналам триггера 6 управляемого импульсами генератора 3 образцовой частоты, по мере переключения распределителя формирует последовательные группы прямоугольных сигналов напряжения различного уровня, длительность которых регулируется изменением коэффициента пересчета делителя 4 по командам блока 2 обработки. Таким образом, период следования тактовых импульсов после его растяжения делителем 4 и триггером б определяет длительность существования уровня выходного напряжения ПЕКН. В исходном состоянии коэффициент пересчета устанавливают таким, чтобы период следования тактовых импульсов на выходе делителя 4 был заведомо больше времени преобразования, при котором динамическая погрешность АЦП равна нулю.
По сигналу блока обработки открывается первый выход распределителя 10,,на котором появляется единичный сигнал, деблокируется ключевой элемент 5 и первым тактовым импульсом, появившимся на выходе делителя 4, переключается триггер б. С временной задержкой в элементе 7 сигналом этого триггера запускается АЦП и с приходом второго тактового импульса триггер вновь возвращается в исходное состояние, блокируя ключевой элемент 5. При этом по сигналу триггера б, переданному через элемент 9 И, в цепи первого выхода распределителя ПЕКН формирует ступень (прямоугольный сигнал) напряжения, уровень которой равен, например кванту, а продолжительность существования обусловлена коэффициентом деления образцовой частоты генератора 3. Этот уровень напряжения поступает на. вход АЦП.
АЦП запускается с постоянной временной задержкой .относительно начала переключения триггера б и включения ступени выходного напряжения ПЕКН, чем обеспечивается начало аналого-цифрового преобразования после завершения переходных процессов ПЕКН Так как время задержки элемента 7 выбирается заведомо большим времени
переходных процессов ПЕКН, это позволяет исключить погрешности измерений из-за начальной нестабильности уровня образцового напряжения при его установлении.
Генератор 3 тактовых импульсов .работает непрерывно, его частота выбирается исходя из минимально возможного времени преобразования АЦП,т.е. достаточно высокой. Но каждый последующий запуск АЦП и кодирование уровня напряжения, формируемого ПЕКН,происходит только после передачи в блок обработки результата предыдущего цикла преобразования, где он сравнивается с истинным значением этого уровня Поэтому используемый старт-стопный асинхронный режим работы позволяет применять в устройстве блок обработк любого быстродействия, независимо от частоты тактового генератора и времени преобразования АЦП.
Коды истинных значений уровней ПЕКН получают предварительно при аттестации АЦП в статическом режиме, которые хранятся в памяти блока обработки и сравниваются с кодами соответствующих уровней, получаемых при аттестации АЦП в динамическом режиме Если при установленном уровне напряжения ПЕКН и заданной длительност существования этого уровня динамическая погрешность преобразования равна нулю, то блок обработки вырабатывает сигнал на изменение коэффициента пересчета делителя 4 и тем самым уменьшается длительность существования кодируемого уровня напряжения ПЕКН, которая изменяется дискретно на величину периода тактовых импульсов.
Если динамическая погрешность кодирования первого установленного уровня по мере уменьшения длительности его существования оказывается отличной от нулевой, то блок обработки вырабатывает сигнал на установку делителя 4 в, исходное состояние и включение второго выхоЭ а распределителя 10, первый выход при этом остается включенным. Поэтому с появлением сигнала триггера б на выходе ПЕКН формируется ступень напряжения, уровень которого равен, например, двум квантам. Далее процесс изменения длительности существования уравня, определение динамической, погрешности кодирования и включение последуквдих ступеней ПЕКН повторяется аналогично указанному по всей шкале квантования АЦП.
Минимальное время существования уровня образцового напряжения,при котором проявляется динамическая погрешность АЦП, обусловлено конеч-. ным временем переходных процессов в АЦП, равно ему и определяется как разность между временем периода следования тактовых импульсов
С учетом изменения коэффициента деления делителя 4 и триггера 6 и постоянным временем задержки элемента 7.
. Формула изобретения
Способ измерения динамических характеристик аналого-цифровых преобразователей путем кодирования изменяющегося во времени образцового сигнала, отличающийся тем, что, с целью повышения точности измерений, образцовый сигнал последовательно изменяют по уровню,.при каждом изменении уровня осуществляют его кодирование с постоянной по времени задержкой относительно момента начала изменения соответствующего уровня, при этом изменяют продолжительность каждого-уровня и его кодирование выполняют до появления допустимой -динамической погрешности, задерживая каждое изменение продолжительности и кодирование уровня до получения результата расчета динамической погрешности предыдущего кодирования этого уровня.
Источники информации, принятые во внимание при экспертизе
5 р, 3 и 4.
