1
Изобретение относится к электротехнике, а именно к быстродействующему электроприводу постоянного тока с широким диапазоном регулирования частоты враш;ения и может быть использовано в электроприводах подач металлорежущих станков.
Известен электропривод постоянного тока, содержащий последовательно соединенные электродвигатель с датчиком частоты вращения, импульсные усилитель мощности и модулятор, регулятор частоты вращения, соединенного с ключом и узлом сравнения сигналов задания и датчика частоты вращения 1.
Наиболее близким к изобретению по технической сущности является устройство, содержащее электродвигатель с датчиком частоты вращения, импульсные усилитель мощности и модулятор, регулятор частоты вращения, один вход которого соединен с ключом, а второй - с усилителем ошибки и узлом сравнения сигналов задания и датчика частоты вращения 2.
Недостатком этих устройств является их сложность и ненадежность в работе в переходных режимах в результате автоколебаний в переходных характеристиках звеньев.
Целью изобретения является повышение надежности и упрощение устройства.
Поставленная цель достигается тем, что в устройство дополнительно введены индикатор наличия сигнала ошибки с зоной нечувствительности и индикатор полярности сигнала ошибки, причем входы индикаторов подключены к выходу усилителя ошибки, а выход индикатора полярности сигнала ошибки соединен с ключом, управляющий вход которого соединен с выходом индикатора наличия сигнала ошибки.
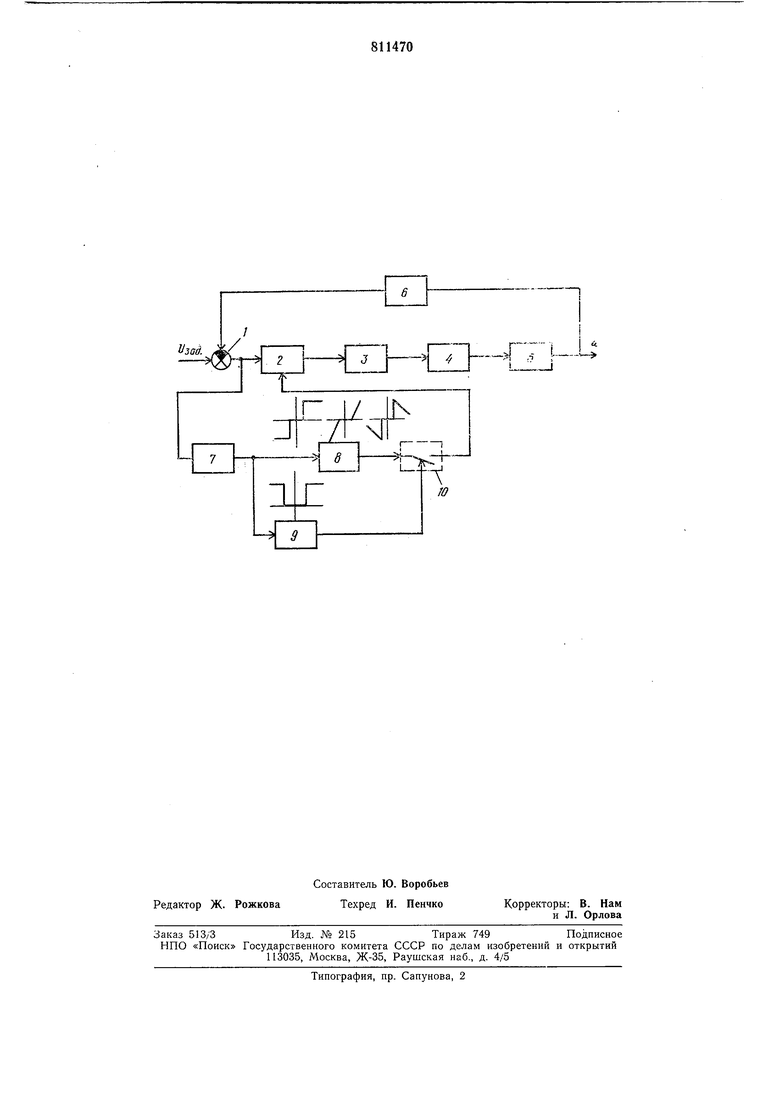
На чертеже приведена схема электропривода постоянного тока.
Электропривод содержит последовательно соединенные узел 1 сравнения сигналов
задания и датчика частоты врашения, регулятор 2 частоты врашения, импульсный модулятор 3, импульсный усилитель 4 мощности, электродвигатель 5, датчик 6 частоты врашения. К узлу сравнения подсоединен
вход усилителя 7 сигнала ошибки, к его выходу подсоединены индикатор 8 полярности сигнала ошибки и индикатор 9 наличия сигнала ошибки, причем выход индикатора 9 подсоединен к управляющему входу ключа 10, через который выход индикатора 8 подсоединен к регулятору 2 частоты вращения.
Электропривод работает следующим образом.
В исходном состоянии, т. е. при сигнале задания, равном нулю, сигнал на выходе регулятора 2 равен нулю, отсутствуют импульсы на выходе модулятора 3, электродвигатель стоит, сигнал на выходе усилителя 7 равен нулю, ключ 10 разомкнут, на выходах индикаторов 9 и 8 сигналы равны нулю.
Величина зоны нечувствительности индикатора 9 выбирается так, чтобы помехи на входе электропривода, усиленные усилителем 7, собственный уход нуля усилителя 7 и сигнал на выходе его, соответствующий величине статической ошибки, не превышали величины этой зоны и не вызывали ложного включения ключа 10.
Величина зоны нечувствительности индикатора 8 быть меньше зоны нечувствительности индикатора 9, и в пределе может быть равца нулю. При подаче сигнала задания величина ошибки равна сигналу задания, при этом срабатывают индикаторы 8 и 9, что ириводит к замыканию ключа 10, который подает в регулятор частоты врашения форсируюш ий сигнал, полярность которого одинакова с полярностью ошибки. Это ириводит к быстрому протеканию переходного процесса в приводе до момента, когда частота врашения электродвигателя достигнет такого значения, при котором ошибка, усиленная усилителем 7, стаиовится меньше зоны нечувствительности индикатора наличия ошибки.
Как только сигнал ошибки на выходе усилителя 7 становится меньше зоны нечувствительности индикатора ошибки, ключ 10 отключает форсируюший сигнал, и далее переходный процесс развивается в соответствии с реально сушествуюшей величиной ошибки на входе регулятора частоты враш.ения.
Процесс ускорения переходного процесса в электроприводе происходит также ири колебаниях момента нагрузки. Например, момент нагрузки электродвигателя увеличился. Это приводит к уменьшению значения частоты врашения электродвигателя, увеличению величины ошибки, срабатыванию индикатора наличия сигнала ошибки, включению ключа 10 и форсированию переходного процесса в регуляторе 2 и в электроприводе в целом.
Форсируюш,ий сигнал, поступающий с выхода индикатора 8 в регулятор 2, может находиться в различной зависимости от величины сигнала ошибки.
Если необходимо, чтобы форсирование регулятора частоты вращения производилось постоянным сигналом, не зависящим от величины ошибки, то индикатор полярности сигнала ошибки выполняется в виде релейного элемента. В случае необходимости иметь прямую пропорциональную зависимость между величиной ошибки и величиной форсирующего сигнала индикатор полярности сигнала ошибки выполняется в виде усилителя постоянного тока. 5 При обратно пропорциональной зависимости между сигналом ошибки и форсируюшим сигналом индикатор 8 выполняется в виде 2-х звеньев - релейного элемента и усилителя ностоянного тока, которые соединены своими входами и выходами, причем выходы должны быть разнополярными, т. е. должно происходить вычитание сигнала усилителя постоянного тока из сигнала релейного элемента.
5 Вид статических характеристик индикатора полярности сигнала ошибки показан для всех 3-х случаев на чертеже (над звеном 8). Во всех рассмотренных случаях статическая характеристика индикатора поляр0 ности сигнала ошибки может быть как без зоны нечувствительности, так и с зоной нечувствительности, но меньшей, чем у индикатора наличия сигнала ошибки. Предлагаемое устройство отличается от
3 известных простотой реализации настройки и более высокой надежности в работе в переходных режимах при малых частотах врашения, поскольку корректирующая обратная связь в регуляторе частоты враше0 ния остается постоянно подсоединенной, что исключает появление автоколебаний в переходных режимах при широком диапазоне регулирования (1:30000) частоты вращения двигателя.
Формула изобретения
Электропривод постоянного тока, содержащий последовательно соединенные электродвигатель с датчиком частоты вращения,
0 импульсные усилитель мощности и модулятор, регулятор частоты вращения, один вход которого соединен с ключом, а второй - с усилителем ошибки и узлом сравнения сигналов задания и датчика частоты вращения, отличающийся тем, что, с целью повышения надежности и упрощения электропривода, в него введены индикатор наличия сигнала ошибки с зоной нечувствительности и индикатор полярности сигнала
0 ошибки, причем входы индикаторов подключены к выходу усилителя ошибки, а выход индикатора полярности сигнала ошибки соединен с ключом, управляющий вход которого соединен с выходом индика5 тора наличия сигнала ошибки.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР по заявке № 2498332, кл. П 02Р 13/16,
20.06.77.
2.Авторское свидетельство СССР по заявке № 2535062, кл. Н 02Р 13/16, 20.10.77.
-Х
Ю

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1980 |
|
SU921014A1 |
| Электропривод постоянного тока | 1976 |
|
SU661704A1 |
| Электропривод постоянного тока | 1979 |
|
SU917291A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1978 |
|
SU782107A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Реверсивный электропривод постоянного тока | 1977 |
|
SU736321A1 |
| Способ управления реверсивным электроприводом постоянного тока | 1978 |
|
SU748761A1 |
| Электропривод постоянного тока | 1979 |
|
SU813647A1 |
| Электропривод постоянного тока | 1983 |
|
SU1117808A1 |
| Электропривод | 1990 |
|
SU1758820A1 |