Изобретение относится к области электропривода и может найти применение в системах управления электроприводс1ми и другими нелинейными системами автоматического регулиройания.
Известен способ управления электроприводом постоянного тока с пропорционально-интегральным регулятором, звеном с зоной нечувствительности, сдополнительными звеньями для форсировки переходного процесса, заключающийся в том, что вырабатывают сигнал ошибки и управляющий сигнал, определяют положение выходной координаты пропорцйоНальНо-интгегрального регулятора относительно зоны нечувствительности, подключают дополнительные звенья в момент вхождения упомянутой выходной координаты ё зону нечувствительности и отключают дополнительные звенья после прохождения выходной координатой зоны нечувствительности 1.
Наиболее близким по технической сущности к предлагаемому изобретению являемся способ управления электррприводом постоянного тока с пропорционально-интегральнам регуля- тором, звеном с зоной нечувствительности с дополнительными звёйьяйи Для
.-1 й Л йя Уифорсировки переходного процесса, заключающийся в том, что вырабатывают сигнал ошибки и управляющий сигнал, определяют положение выхойной координ аты- -прЪ11 ц1Гон л-Ш-о Ш 1 ГЖн1 гГ регулятора отно&итёльно зоны нечувств йтель нос ти, пЬдк /почайт Дополнит ел ь ные ЭвёМья в MoiyfeHf ТвГгГбждения упомянутой выходной координаты в зону не10чувствительности и Отключают дополнительные звенья После прохождения выходной координатой зоны нечувств.ительности 2.
15
Недостатком этого способа является Невысокое быстродействие электропрйвОда при реавер се на низких скоростях. Оно обусловлено тем, что при реверсе скорость изменения выходной ко20ординаты пропорционально-интегрсшьного регулятора при её движении от исходного значения до значения, соответствукмцего вхождению ее в зону нечувствительности,остается низкой, так
25 как управляемый ключ до момента вхождения в зону нечувствительности рйзомкнут, и дополнительные звенья форси1ровки переходного, процесса отключены.
йШ
Cs.f. -1.--;лХ MTxii-- aSbKris;fe fe 4.S «fr3-;s:-:;
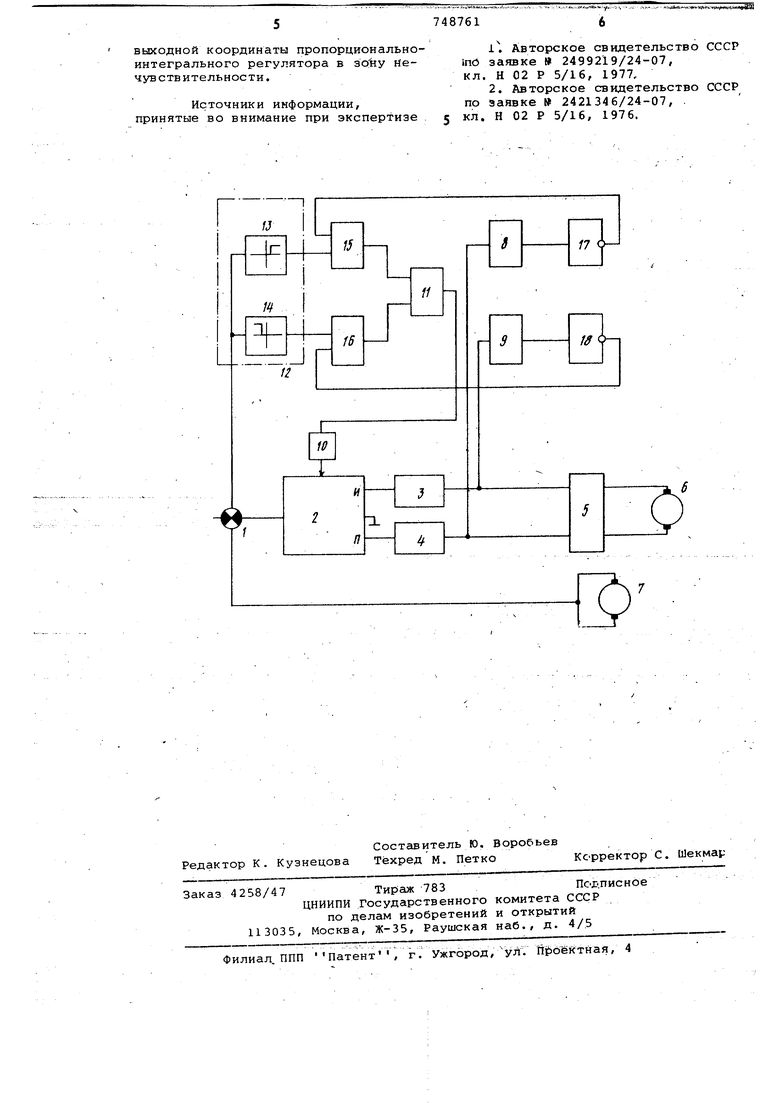
va:iifcSKiftSytirt;se3b - - a.-i. Целью изобретения является повыше ние 6ыстр6д ёйс ТВ и я управ ляемого э лек тропривода. Цель достигаегся тем, что определ ют соответствие знака ошибки знаку сигнала управления, и при несоответствии знаков включают блок, форсировки переходного процесса до момента Вхожде1ния выходной координаты пропор ционально-интегрального регулятора в зону нечувствительности. На чертеже приведена схема предлагаемого устройства Устройство представляет собой реверсивный злектропрйвод постоянного тока, содержащий последовательно соединенные узел сравнения сигнала задания d сигналом обратной связи по частоте вращения 1, пропорциональноинтегральный регулятор 2 с парафазным выходом, два широтно-импульсных модулятора 3 и 4, каждый из которых подключен к од;ному из выходов пропор ционально-интегрального регулятора 2 импульсный усилитель мощности 5, эле тродвигатель 6 и тахогенератор 7. К выходу каждого из широтно-импульсных модуляторов 4 и 3 подключено по ИНД1 катору импульсов 8 и 9. Индикатор импульсов представляет собой логичес кое устройство, имеющее два состоя, одно из состояний ноль - соответствует отсутствию импу сов, а другое -.аличию импульсов на выходе соответствующего широтно-импульсного модулятора. Электропривод снабжен дополнитель ными звеньями 10 для. форсировки пере х(эдного процесса в пропорцирнально-Т те ральном регулятоЕ е 2 с управ ляемым ключом, выход логического элемен та ШЩ 11 соединен с управляющей Цепьюключа дополнительных звеньев 1 К выходу узла сравнения подсоединен й нййкатор знак а сигнала ошибки 12, выполненный в видё/ двух пороговых устройств 13 и 14, каждое из которых индицирует ошибку определенного знака. Выход каждого из пороговых устройств 13 и 1.4 ййдйкатбра знака ошибки li.подключен к входу соответству щвгб логического элемента И 15 иlie;.-Ко второму входу каждого из # элементов И 15 и 1 б подключен через эл ейейт НЕ 17 и 18 вькод индикатора импульсов 8 и9. . Способ управления реализуется в, joiiBcaHHOM устройстве следующим обра . Координатой эле4 тропривода, знак йртброй сравнивается в приведенном щ ямёрё устройства реализующего предлагаемый способ,являете я s ькоднрй сигналширотно-импульсного моду , . . - rJ статических режимах работы приода определенному знаку ошибки системы, например, положительному, сответствует работа модулятора 4 и ключения одной из групп тиристоров ймпульсного усилителя мощности. При этом на выходе индик.атора 8 логическая единицс,на выходе з.лемента НЕ 17 логический ноль и, соответственно на выходе элемента И 15 - логический ноль. На входе второго логического элемента И 16, подключенном к пороговому устройству 14 в этом режиме логический ноль. На обоих входах элемента ИЛИ 11 - логические нули и, соответственно, дополнительные звенья дЛя форсировки переходного процесса в пропорционально-интеграль- ном регуляторе 2 находятся в от-. ключенном состоянии и не оказывают воздействия на регулятор 2. При резком изменении знака ошибки выходные сигналы пороговых устройств изменятся на противоположные, выходное напряжение регулятора будет изменяться значительно медленнее,поэтому в первый момент состояние индикаторов импульсов 8 и 9 не изменится. На выходе элемента И 16 при этом появится логическая единица и звенья форсировки пропорционально-интегрального регулятора окажутся включенными, чем и будет ускорен процесс движения выходной координаты регулятора на участке его изменения от началЬногЪ положения до достижения зоны нечувствительности. При прохождении зоны нечувствительности звенья форсировки 10 будут удерживаться во включенном состоянии логическим элементом ,И 16 до окончательного прохождения зонынечувствительности. Таким образом, за счет определения соответствия знака ошибки знаку управляющего сигнала при включений дополнительных звеньев обеспечивается повышение быстродействия электропривода. : Формула изобретения Способ управления реверсивным электроприводом постоянного тока, включающий получение сигнала ошибки и сигнала управления и определение положения выходной координаты пропорциональноинтегрального регулятора относительно зоны нечувствительности и удержа-:, ния блокОБ форсировки переходных процессов во включенном состоянии во время прохождения выходной координатой зоны нечувствительности, о т л ич а ю щ и и с я тем, что, сцелью повышения быстродействия, определяют соответствие знака ошибки знаку сигнала управления и при несоответствии знаКОВ включают блок форсировки 11ч2рёХОДного процесса до момента вхождения
выходной координаты пропорциональноинтегрального регулятора в зону Нечувствительности,
Источники информации, принятые во внимание при экспертизе
748761
1.Авторское свидетельство СССР по заявке 2499219/24-07,
кл. Н 02 Р 5/16, 1977,
2.Авторское свидетельство СССР по заявке 2421346/24-07, .
кл. Н 02 Р 5/16, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1978 |
|
SU782107A1 |
| Электропривод постоянного тока | 1980 |
|
SU921014A1 |
| Способ управления электроприводом постоянного тока | 1977 |
|
SU635588A1 |
| Реверсивный электропривод постоянного тока | 1977 |
|
SU736321A1 |
| АДАПТИВНЫЙ ИМПУЛЬСНЫЙ ПРОПОРЦИОНАЛЬНС ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОРп<?п**;,.«, | 1972 |
|
SU432459A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| Электропривод постоянного тока | 1976 |
|
SU661704A1 |
| Регулятор скорости электропривода | 1980 |
|
SU957396A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРЕХФАЗНЫМИ ТРЕХУРОВНЕВЫМИ АКТИВНЫМИ ВЫПРЯМИТЕЛЯМИ НАПРЯЖЕНИЯ | 2020 |
|
RU2734554C1 |
| Реверсивный электропривод постоянного тока | 1979 |
|
SU936322A2 |
П
