(54) СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИЮДОМ ПОСТОЯННОГО ТОКА И УСТРОЙСТВО ДЛЯ
Изобретение относится к электротехнике, а именно к управлению нелинейными автоматическими системами, и может найти применение в системах адаптивного управления электроприводами.
Известен способ управления электроприводом постояйного тока,, заключающийся в том, что определяют положение выходной координаты регулятора частоты вращения относительно зоны, нечувствительности, подключают дополнительные звенья форсировки переходного процессав регуляторе частоты вращения в момент вхождения упомянутой выходной координаты в зону нечувствительности, и выключение дополнительных звеньев производят в момент выхождения выходной координа ты регулятора из зоны нечувствительности 1.
Наиболее близким к п едлагаемому по технической сущности является способ управления электроприводом постоянного тока, при котором определяют положение выходной координаты регулятора частоты вращения относительно зоны нечувствительности, подключают дополнительные звенья для форсироьки перечолмого процесса ЕГО ОСУЩЕСТВЛЕНИЯ
в регуляторе частоты вращения в момент вхождения упомянутой выходной координаты в зону нечувствительности, и выключение дополнительных звеньев 5 производят с временной задержкой относительно мсяиента выхода выходной координаты регулятора из зоны нечувствительности 2.
Величина временной задержки определяется одной из координат электропривода, например сигналом задания, либо до момента достижения модулем тока якоря заданного значения.
Способ осуществляется устройстtS BOM, содержащим последовательно соединенные узел сравнения, регулятор частоты вращения, формирователь импульсов управления и импульсный уси литель мсяйности, тахогенератор, выход которого подключен к узлу сравнения, дополнительные звенья для (Х рсировки переходного прюцесса в - регуляторе частоты вращения, ключ для-подключения дополнительных звеньев к регулятору, индикатор импульсов управления, вход которого подключен к выходу формирователя импульсов управления, элемент задержки и логический элемент ИЛИ, выход
30 которого связан с ключом, выход
индикатора подключен к одному входу логического элемента ИЛИ и ко входу элемента задержки, выход которого подключен к другомувходу логического элемента ИЛИ |2 .
Однако эти способы не обеспечивают форсирование переходного процесса в регуляторе при прохождении выходной координаты регулятора от установившегося значения до момента вхождения ее в зону нечувствительности нелинейного звена, а также при прохождении выходной координаты от одного установившегося значения до другого установившегося значения того же знака, вызванного изменением момента нагрузки (сброс либо наброс нагрузки).
Цель изобретения - повышение быстродействия. . -.-
Поставленная цель достигается тем, что определяют модуль производной статической составлякнцей тока якоря, сравнивают его с заданным значецием и подключают дополнительные звенья .для форсировки переходного процесса при превышении модулем заданного значения.
Такой способ осуществляется устройством, которое, в отличие от известного, снабжено формирователем, один вход которого подключен к выход усилителя мощности, другой вход - к йыходу тахогенератора, выход формирователя связан с третьим входом логического элемента ИЛИ.
Кроме того, формирователь выполнен в виде последовательно соединенных датчика статической составляющей тока, дифференцирующего звена и порогового элемента.
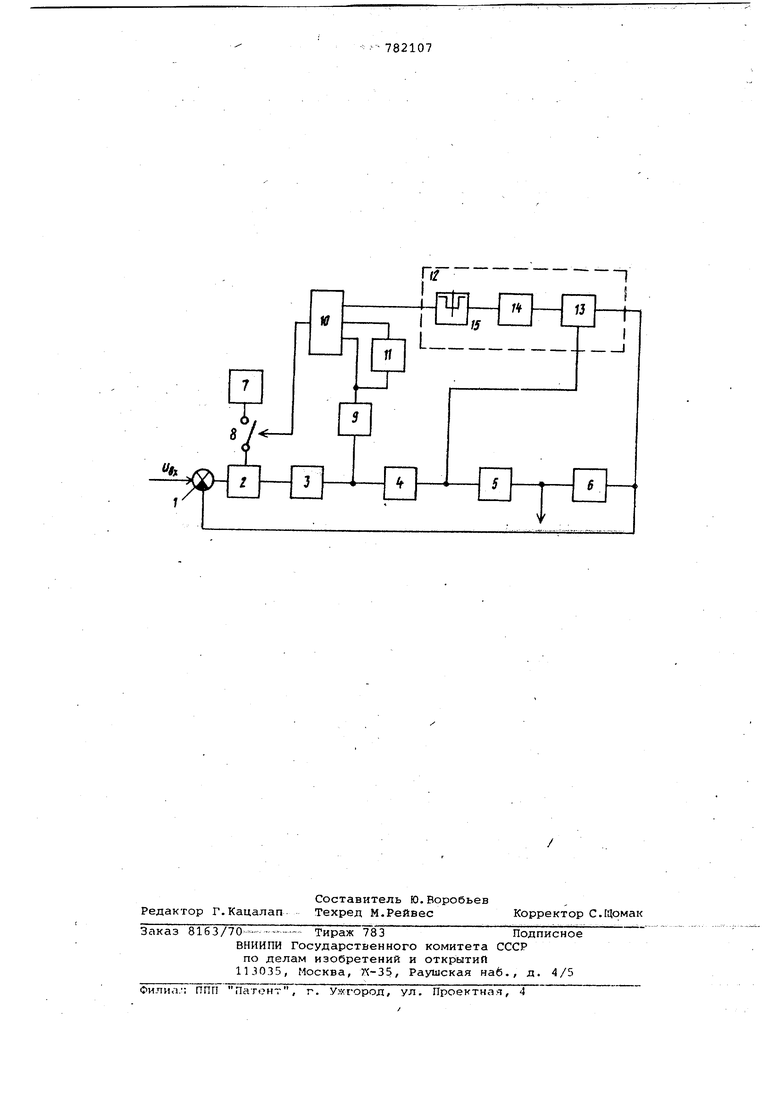
На чертеже схематически изображен устройство для осуществления прёдгалаемого способа.
Устройство содержит последов:ательно соединенные узел 1 сравнения, регулятор 2 частоты вращения (усилитель с корректирующими связями), формирователь 3 импульсов управления импульсный усилитель 4 мощности, двигатель 5, тахогенератор б, выход которого подключен к узлу 1, дополнительные звенья 7 для форсировки переходного процесса в регуляторе 2, подключаемые к регулятору 2 посредством управляемого ключа 8. К выходу формирователя 3 импульсов управления подключен индикатор 9 импульсов упрглления, выход которого связан со входом Логического элемента 10 ИЛИ. К выходу индикатора 9 подключен также вход формирователя временной задержки - одновибратора 11, выход которого Подключен к другому входу элемента 10. Выход элемента Ю управляет положением ключа 8.
Кроме того, устройство содержит формирователь 12 логического сйгна. ла о наличии производной статической составляющей тока якоря, состоящий
782107
из датчика 13 статического тока, один вход которого связан с выходом усилителя 4, другой вход подключен к выходу тахогенератора 6. Выход датчика 13 подключен ко входу дифференf цирующего звена 14, выход которого подключен ко входу порогового детектора 15 модуля. Выход формирователя 12 подключен к третьему входу элемента 10 ИЛИ.
0 Дополнительные звенья 7 могут быть выполнены либо в виде дополнительного усилителя с коэффициентом усиления больше единицы, подключенного последовательно с регулятором 2 частоты вращения,либо в виде дополнительной корректирующей цепи регулятора 2.
Пороговый элемента (детектор) 15 представляет собой пороговое устройQ ство, реагирукицее на заданное значение входного сигнала независимо от его полярности, например триггер ИЬлидта с выпрямителем на входе.
Способ осуществляется следующим образом.
При помощи индикатора 9 определяют положение выходной координаты регулятора 2 частоты вращения относительно зоны нечувствительности
0 формирователя 3. Ключом 8 подключают дополнительные звенья 7 для форсировки переходного процесса в момент вхождения упомянутой выход ной координаты регулятора 2 в зону
5 нечувствительности.Дополнительные звенья 7 выключают с постоянной временной задержкой относительно момента выхода выходнойкоординаты из зоны нечувствительности. Временную задержку формируют элементом. 11 задержки и выбирают равной времени нарастания тока якоря до момента хЬлостого хода исполнительного механизма (двигателя), Одновременно датчиком 13 определяют статическую составляющую тока якоря, при помощи дифференциру ющего звена 14 получают производную статической составляквдей тока якоря и сравнивают«модуль производной с Зсщанной величиной 0 величиной уставки порогового элемента 15, выбираемой из условий помехозащищенности привода.
При превышении модулем величины уставки порогового элемента 15 подключают дополнительные звенья 7 для форсировки переходного процесса в регуляторе 2.
Устройство работает следующим образом.
В исходном состоянии, когда входQ ной сигнал электропривода равен нулю, сигнал на выходе усилителя. 2 равен нулю. Импульсы управления на выходе формирователя 3 отсутству- ют. этом на выходах индикатора
5 9 и Элемент i Ю - логическая 1. Управляемый ключ 8 замкнут, и допол нительные звенья 7 для форсирования переходных процессов в регуляторе подключены к регулятору 2. Дополнительные звенья 7 увеличивают общий коэффициент усиления либо скачкообразно изменяют динамические параметры регулятора 2. При подаче входного сигнала (Vg 0) происходит форсированный переходный процесс в регуляторе 2, выхо ная координата которого быстро проходит зону нечувствительности формирователя 3 импульсов. При появлении импульсов на выходе формировате ля 3 на выходе индикатора 9 импульсов управления прявляется сигнал, соответствунхций логическому О. При переходе сигнала на выходе формирователя 3 от логической 1 -до логического О запускается элемент задержки - одновибратор 11, который формирует сигнал, соответствующий л гической 1 на заданной длительнос ти. Таким образом, сигнал, соответствующий логической единице на выхо де элемента 10 ИЛИ после появления импульсов на выходе формирователя 3 при отсутствии сигнала, соответствующего логической 1 на выходе формирователя 12, обращается в логический О с запаздыванием, определяемым одновибр атором 11. Величина запаздывания, формируемого одновибратором 11, задается равной времени нарастания тока якоря до момента холостого хода механизма (двигателя). При наличгш момента сопротивления на валу двигателя начинается нарастание тока якоря. Так как ключ 8 замкнут и дополнительные цепи 7 подключены к регулятору 2, нарастание тока происходит относительно быстро. При появлении тока якоря, при наЛИ.ЧИИ момента нагрузки и при момент двигателя, меньшем момента нахрузки двигатель стоит и ток якоря статическому току. Так ;как ток якоря .растет, т.е. имеен место произиодная статического тока, на выходе Формиро вателя 12 появляется сигнаэт, соответ ствую1вйй логической 1. При моменте двигателя, равном Моменту нагрузки (момент трогания) нарастанИе статической составляющей то ка прекращается, производная статической составляющей тока равна нулю, на выходах формирователя 12 и элемента 10 ИЛИ - логический О,ключ 8 отключает дополнительные звенья 7 от регулятора 2. При реверсе электропривода изменение полярности входного сигнала на входе узла 1 сравнения приводит к изменению длительности импулбсой управления на выходе формирователя 3 и к соответствующему изменению среднего напряжения на выходе импульсного усилителя 4 мощности. Начинается спад якорного тока, на вы-, ходе формирователя 12, и, соответственно, на выходе элемента 10 ИЛИ появляется логическая 1, ключ 8 подключает дополнительное зв1ено 7 к регулятору 2. Происходит форсировКа переходного процесса в регуляторе 2 и, соответственно, увеличивается скорость изменения якорного тока. При вхождении выходной координаты регулятора 2 в зону нечувствительности нелинейного элемента На выходе формирователя 3 отсутствуют импульсы управления, и якорный ток равен нулю. На выходе формирователя 12 - логический О, на выходе индикатора 9 импульсов управления и на выходе логического элемента 10 ИЛИ - логическая 1, ключ 8 остается замкнутым. Выходная координата регулятора 2 быстро проходит зону нечувствительности формирователя 3 импульсов. В дальшейшем работа электропривода аналогична описанному выше (при пуске). Работа электропривода при набросе (в общем случае изменения) момента нагрузки. В установившемся режиме момент двигателя равен моменту нагрузки. Изменение момента нагрузки приводит к изменению статической составляющей тока якоря, на выходах формирователя 12 и, соответственно, элемента 10 ИЛИ появляется логическая 1, ключ 8 подключЛет дополнительное звено 7 к -регулятору 2, и происходит форсированный переходный процесс в регуляторе 2. При достижении статической составляющей тока якоря установивегося значения, соответствующего оменту нагрузки, на выходе формнователя 12 -. логический О, и люч 8 отключает форсирукмцие доолнительные звенья 7 от регулято-: а 2. Как известно,- ток якоря двигате Зя 3ст+3дц„, (1) де ЗСУ - статическая составляющая тока якоря, соответствующая моменту нагрузки двигателя ; Зд1,„- динамическая составляющая тока якоря. 3 v H-jPa,(2) де j - момент иг ерции двигателя с механизмом, р - символ дифференцирования. Si - частота вращения двигателя. Чтобы получить сигнал, соответтвукщий статической составляющей ока якоря, используется датчик 13 татического тока. Сигнал, пропорциональный якорноу току, поступает на вход апериодиеского звена. На выходе этого звена Сигнал, олучают сигнал
,:. -i ir прШб1Й|йональный частоте вращения, поступает на вход реально диффё рёйцируквдего эвена, на .выходе диФферендирующего звена появляется сигнаил Х(р): Yip сигналы поступают на вход сумматора с разными знаками. На выходе сумматора получают ОД, равное ... . К,3. к.ра ) vV-ifFr-. : с учетом (1) и (2) можно записать Мр)- %K PftK pgJL- T:;FT При к. и получают x,,,-flV. Таким образом, на выходе датчика ста фического тока сигнал пропорционгшен статической составляющей тока якоря, ;ГёГ моменту нагрузки двигатели. С выхода датчика 13 статйчесгсбто тока сйгна лХср) поступает на вход дифферен цирующегб звена 14 с передаточной функцией -b-L (,), На выхода звена 14 сигнал --- чЛУ JCT . (ViHTp-n -V a--Kz-K)При достаточно большой величине коэффициента к, т.е. при и ,Т можно считать, чтоХ,1р)КэТ,,р:Зст т.е . на выходе звена 14 сигнал пропо ционален производной статической сос тавлйкидей тока якоря. Способ управления элёкурйИрйводЬм постоянного тока и устройство для -его 6существ 1ения обеспечивают повы иёййе быстродействия и ж сткоС т й Динамических характеристик привода при изменении момента сухого трШйя на валу электродвигателяГ Формула изобретения 1. Способ упра;ё 1ёнияэлектройрдво дом постоянного тока, при котором оп Дбйяют положение выходной координаты регулятора частоты вращения относите й1ег-зшы не вствителзынЬстйТ таэдкйй чан5т дополнительные звенья для форси ровКи (эднёго ntiouecca: в рёггляторе частоты вращения в момент вхож деййЖупбмЖутЬй выхЬдной кЬОрдина ы в эгону нечувСтвйтёльнсиС-гй, выкЛю8чение дополнительных звеньев производят с временной задержкой относительно мбмёнта выхода выходной коордийаты регулятора из зоны нечувствительности, отличаю 14 ийся тем, что, е целью повышения быстродействия, бпрёделяют модуль производной статиче ской составляикцей тока якоря, сравнивают его с заданным значением и подключают дополнительные звенья для Форсировки переходного процесса при превышении модулем заданного значения. 2.Устройство для осуществления . способа по п. 1, содержащее послет довательмо соединенные узел сравнения, регулятор частоты вращения, формировШтель импульсов управления и импульсный усилитель метцности, тахогенератор, выход которого подключен к узлу сравнения, дополнительные звенья для форсировки переходного процесса в регуляторе частоты врай(ёййя, ключ для подключения дополнительных звеньев к регулятору, индикатор импульсов управления, вход которого подключен к выходу формирователя импульсов управления, элемент задержки и логический элемент ИЛИ, выход которого связан с ключом, выход индикатора подключен к одному входу логического элемента ИЛИ и ко входу элемента задержки, выход которого подключен к другому входу логического элемента или, от л и чающий с я тем, что рир снабжено формирователем, один йхЪд которого подключен к выходу уеййитёля мощности, другой вход - к выходу тахогенератора, выход формирователя связан с третьим входоМ логического элемента ИЛИ. 3.Устройство по п. 2, о т л ич а ю щ е ее я тем, что формирователь выполнен в виде последовательно соединенных датчика статической составляющей тока якоря, дифференцирукадего звена и порогового элеMeHTai .. .-;...- - . . ; / , Источники информации, принятые во, внимание при экспертизе 1.Авторское свидетельство СССР 511661, кл. Н 02 Р 5/16, 1976. 2.Авторское свидетельство СССР по заявке № 2421346/24-07, .кл. Н 02 Р 5/06, 22.11.76.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1980 |
|
SU921014A1 |
| Способ управления реверсивным электроприводом постоянного тока | 1978 |
|
SU748761A1 |
| Способ управления электроприводом постоянного тока | 1977 |
|
SU635588A1 |
| Электропривод постоянного тока | 1979 |
|
SU917291A1 |
| Электропривод постоянного тока | 1982 |
|
SU1073867A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2025035C1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Электропривод постоянного тока | 1981 |
|
SU1029365A1 |
| Электропривод постоянного тока | 1976 |
|
SU661704A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |