1
Изобретение относится к машиностроению и может быть использовано в дистанционных манипуляторах, работающих как в обычных, так и во вредных условиях, во взрыво- и пожароопасных помещениях различных классов и категорий.
Известен копирующий манипулятор, содержащий задающий и исполнительный органы, механическая рука каждого из которы имеет шарнирно соединенные звенья, двигатель, электромагнитные муфты, ведущие части которых кинематически связаны с валом двигателя, а ведомые - со звеньями руки, и аппаратуру управления с источником питания 111.
Недостатками известного манипулятора являются большое потребление электроэнергии вследствие постоянного подключения манипу лятора к источнику питания, недостаточность дистанционности управления, что ухудшает его эксплуатационные качества и снижает экономичность. .
Цель изобретения - улучшение эксплуатационных качеств и повьаиение экономичности манипулятора.
Поставленная цель достигается тем, что копирующий манипулятор снабжен установленным на валу двигателя, например электродвигателя, маховиком и регулятором напряжения, электрически связанным с обмотками электродвигателя, с источником питания и с аппаратурой управления.
При этом регулятор напряжения выполнен в виде электроизмерительного устройства с мостовой схемой соеди0нения его элементов и с усилителем, постоянного тока.
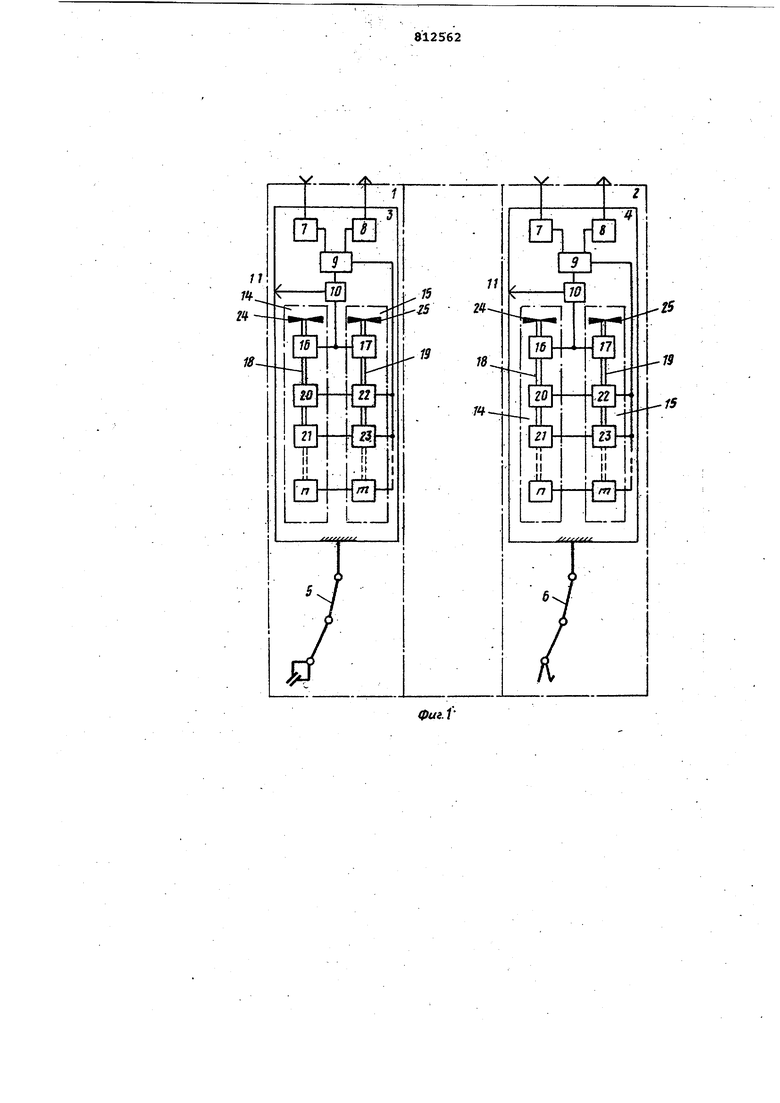
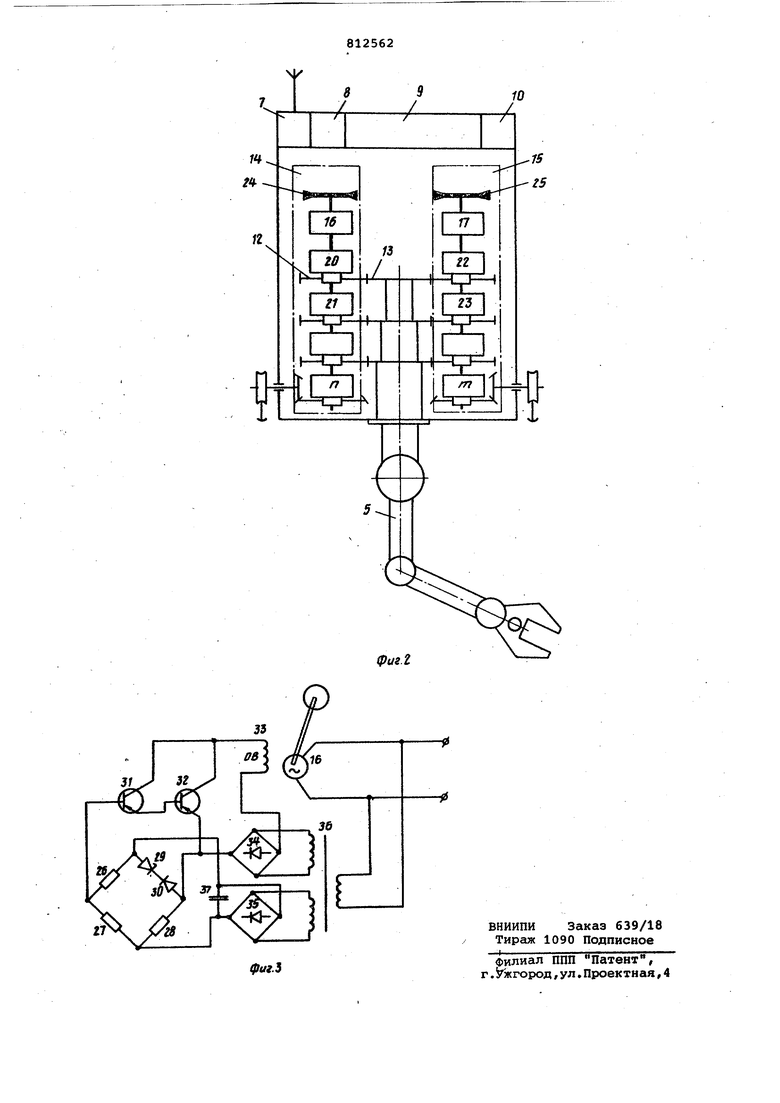
На фиг. 1 изображена функциональная схема предлагаемого манипулятора., на фиг. 2 - исполнительный орган 5 манипулятора с силовым блокомf на фиг. 3 - схема регулятора напряжения.
Манипулятор имеет исполнительный и задающий органы 1 и 2, связанные
0 между собой каналом синхронно-следящей связи, например радиосвязи. Конструктивно исполнительный и зада- ющий органы выполнены аналогично и состоят из силовых блоков 3 и 4
5 приводов и механических рук 5 и б.
Силовой блок приводов содержит приемник 7, передатчик 8, усилительно-преобразовательную аппаратуру 9, регулятор 10 напряжения, разъем 11 0 для подключения источника питания.
кинематические связи в виде шестерен 12 и 13 и два сборных узла 14 и 15р которые состоят из двигателей 16 и 17, на валах 18 и 19 которых расположены..исполнительные элементы 20, 21 и т.д. п, 22, 23 и т.д m в виде электромагнитных муфт и маховики 24 и 25 соответственно.
Регулятор 10 напряжения состоит из мостового электроизмерительного устройства на резисторах 26-28 со стабилитроном 29 и диодом 30 в одном яц плеч моста и усилителя постоянного тока на триодах 31 и 32. Обмотка 33 возбуждения Двигателя 16 включена в коллекторную цепь основного управляющего триода 32. Цепи обмотки возбуядаения и управления питаются от выпрямителей 34 и 35 подкл1бченных к отдельным обмоткам трансформатора 36. Для сглаживания пульсации вып рямленного напряжения включен конденсатор 37.
Манипулятор работает следующим образом.
Силовой блок 3 исполнительного органа, 1 подключается через разъем 11 к внешнему источнику энергии в виде электроэнергии или энергии сжатогсЗ воздуха) .
. Электроэнергия .подается на электродвигатели 16 и 17, которые приводят во вращение маховики 24 и 25 и разгоняют их. После получения маховиками запаса кинетической энергии отключается внешний источник питания. Манипулятор готов к работе.
Двигатели 16 и 17 начинают работать в режиме генераторов, т.е. осуществляют питание приемника 7, передатчика 8, усилительно-преобразовательной аппаратуры 9 управления и исполнительных элементов 1.муфт 20, 21 и т.д. п и 22, 23 и т.д. т. С задающего органа 2 по каналу сиихроннс-следящей радиосвязи осуществляется управление исполнительным органом 1 в копирукндем или автоматическом режиме.
При изменении скорости вргицения маховиков 24 и 25 и изменении нагрузки на механической руке 5 стабилизацию напряжения обеспечивает регулятор 10 напряжения, в котором к одной диагонали моста подводится входное напряжение, пропорциональное регулируемому напряжению двигателя (генератора) 16. Выходное напряжение снимается с другой диагонали моста. Оно равно разности между напряжением н стабилитроне 29 и пгадением напряжения на резисторе 26.. Падение напряжения на резисторе 26 пропорционально входному напряжению
и с его увеличением линейно растет. При дальнейшем увеличении входного напряжения оно остается примерно постоянным. Цепи обмотки возбуждения и управления пит,аются от выпрямителей 34 и 35 подключенных к отдельным обмоткам трансформатора 36. Конденсатор 37 сглаживает пульсации выпрямленного напряжения.
Запас скорости маховиков 24 и 25 позволяет получить мощность на валах 18 и 19, более чем в 10 раз превышающую мощность разгонных двигателей 16 и 17, что позволяет применять двигатели малой мощности.
Скорость вращения вала маховиков S 24 и 25 зависит не от нагрузочного момента на этом валу, а только, от количества накопленной в нем энергии. Это означает, что маховик может развивать любую мощность, необходимую на механической руке 5 исполнительного органа 1.
При работе маховиков 24 и 25 возникает гироскопический эффект, вследствие чего механическая рука 5 исполнительного органа 1 становится более устойчивой.
Формула изобретения
1.Копирукадий манипулятор, содержащий задающий и исполнительный органы, механическая рука каждого из которых имеет шарнирно соединенные звенья, двигатель, например электродвигатель, электромагнитные муфты, ведущие части которых кинематически связаны с валом этого двигателя, а ведомые - со звеньями руки, и аппаратуру управления с источником питания, о т л и ч а ю 1Д и и с я тем, что, с целью улучшения эксплуатационных качеств и повышения- экономичности манипулятора, он снабжен установленным на валу электродвигателя маховиком
и регулятором напряжения, электрически связанным с обмотками электродвигателя, с источником питания и с аппаратурой управления.
2.Манипулятор по п. 1, отличающийся тем, что регулятор напряжения выполнен в 1виде электроизмерительного устройства по мостовой схеме соединения его элементов
и усилителя постоянного тока. Источники информации, принятые во внимание при экспертизе
1. Кулешов B.C. и Дакота Н.Д. Динамика систем управления манипуляторами. М., Энергия, 1974, с. 108.
L J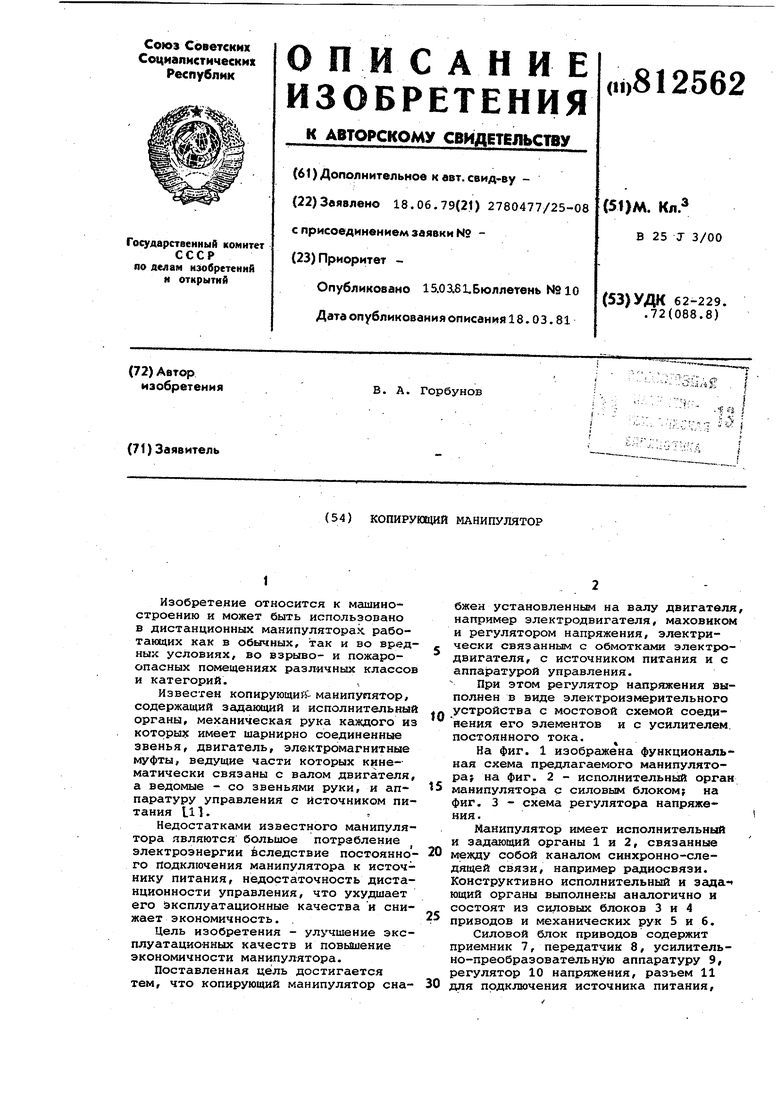
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1979 |
|
SU806401A1 |
| Ветроэлектрический агрегат | 1978 |
|
SU780142A1 |
| БЛОЧНО-КОМПЛЕКТНАЯ ГАЗОРАСПРЕДЕЛИТЕЛЬНАЯ СТАНЦИЯ С АВТОНОМНОЙ СИСТЕМОЙ ПИТАНИЯ ЭЛЕКТРОЭНЕРГИЕЙ | 2004 |
|
RU2270395C2 |
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| Вентильный электродвигатель | 1983 |
|
SU1156204A1 |
| СТЕНД С ЭЛЕКТРОМАГНИТНЫМ НАГРУЗОЧНЫМ МОДУЛЕМ ДЛЯ ИССЛЕДОВАНИЯ И ИСПЫТАНИЯ ЭЛЕКТРОПРИВОДОВ | 2010 |
|
RU2442995C2 |
| СИСТЕМА ЭЛЕКТРОННОГО УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ (ВАРИАНТЫ) | 2018 |
|
RU2674993C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2006 |
|
RU2313877C2 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО ПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2001 |
|
RU2189691C1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ АППАРАТУРЫ ПОДВИЖНОГО КОМПЛЕКСА ТОПОПРИВЯЗКИ | 2010 |
|
RU2435280C1 |