(54) КОПИРУЮЩИЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1979 |
|
SU812562A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2106265C1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА | 2018 |
|
RU2741469C1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2020 |
|
RU2749819C1 |
1
Изобретение относится к машиностроению и может быть использовано для аистанционного проведения работ в горячих камерах, химически активных зонах, врецньсс и опасных для здоровья человека.
Известен копирующий манипулятор, содержащий механическую руку, шаркирно соединенные звенья которой кинематически связаны с силовым блоком, состоядим из двигателя и соединенных с его валом модулей, число которых равно числу степеней свободы механической руки, каждый модуль снабжен электромагнитными муфтами 1рямого и обратного действия .
Известный манипулятор обладает существенным недостатком - большим уровнем акустических шумов, которые возникают за счет трущихся кинематических пар при вращении ведущих шестерен. Такой шум привода задакяцего органа 1фиводят к быстрой утомляемости оператора и к снижению эффективности его работы, .а, следовательно, и к уменьшению надежности системы человек-машина.
Целью изобретения является повышение надежности и улучшение эксплуатационных качеств манипулятора путем уменьшения акустического шума.
Поставленная цель достигается тем, что силовой блок снабжен вторым двигателем, муфты прямого и обратного действия собраны в два блока, причем ведущие части муфт первого блока жестко связаны с ва-лом первого двигателя, а веецпцие части муфт второго блока - с валом второго сдаигателя.
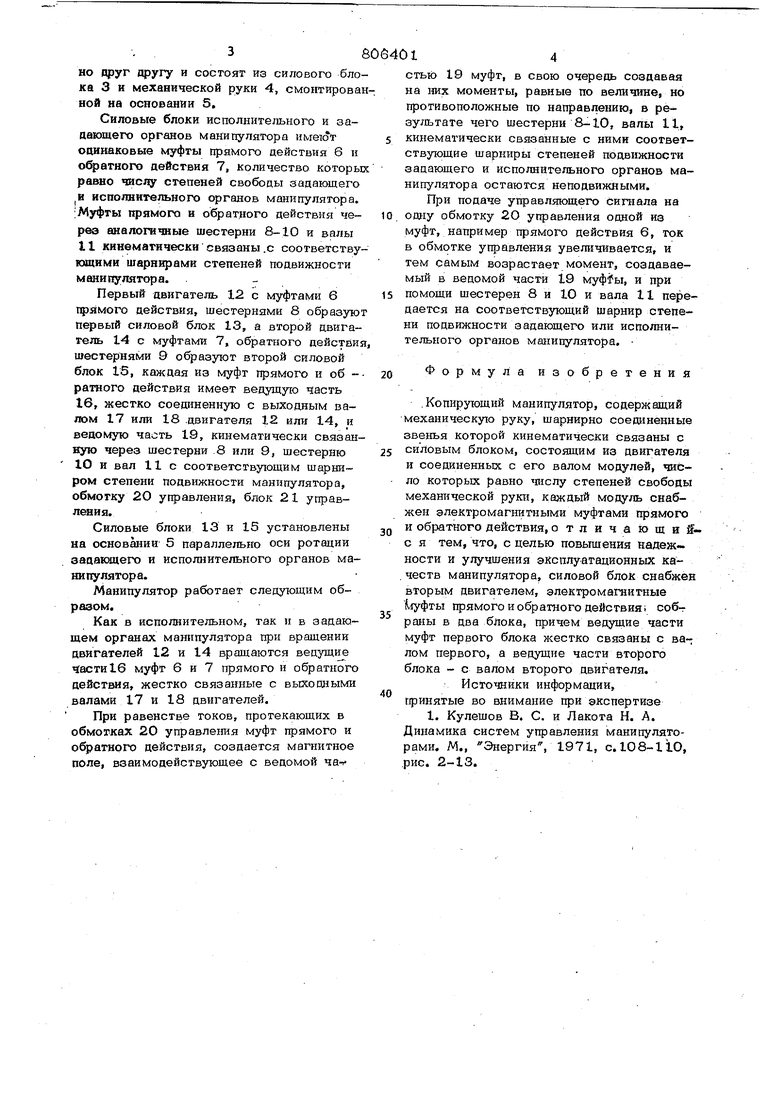
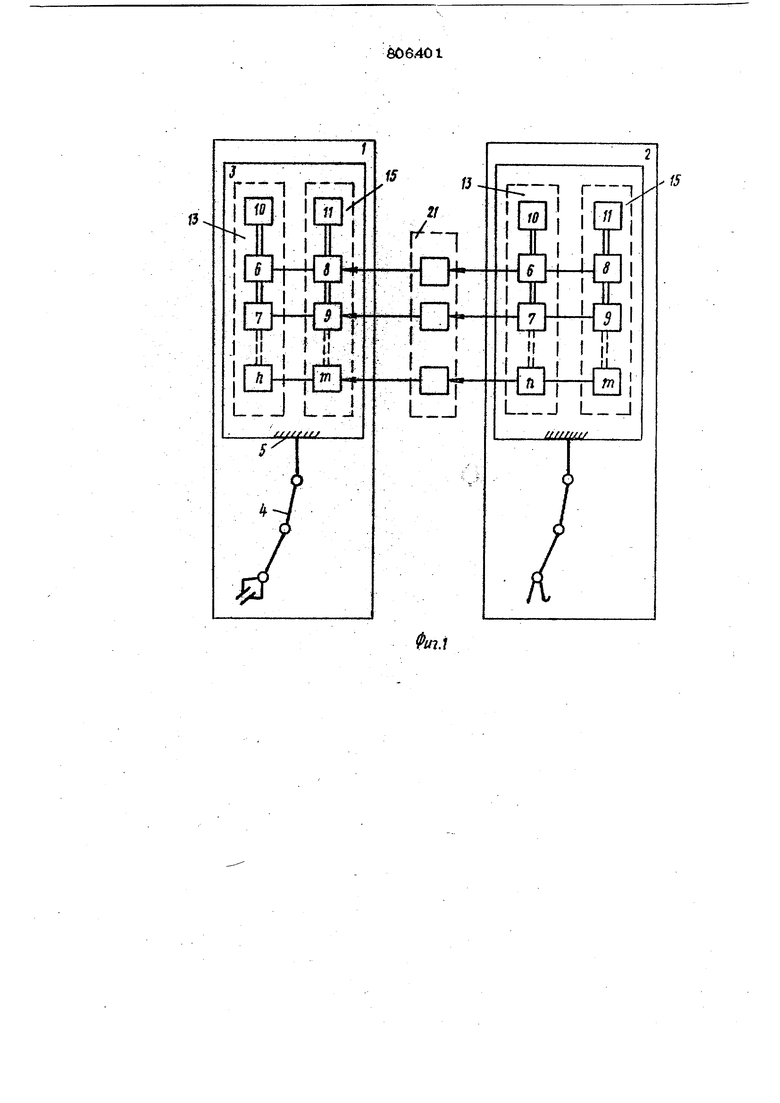
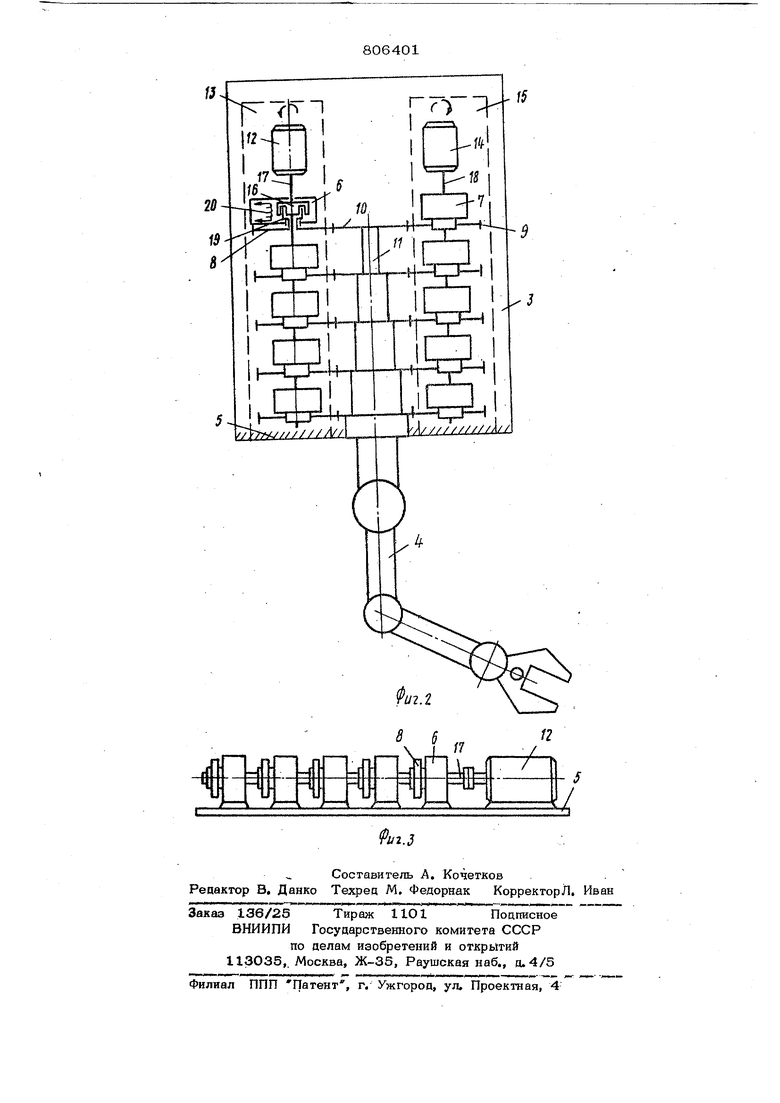
На фиг. 1 изображена функциональная схема копирукядего манипулятора, на фиг. 2 - его исполнительный орган, на фиг. 3силовой блок.
Ма И| лятор содержит исполнительный орган 1, который производит копирование движе|шй задающего органа 2, обеспечи вая воспроизведение усилий нагрузки на стороне оператора. Такая работа манипулятора осуществляется с помощью обратимой следящей системы. Исполнительный и задающий органы выполнены аналогично друг другу и состоят из силового блока 3 и механической руки 4, смонтированой на основании 5.
Силовые блоки исполиительного и задающего органов манипулятора имеют одинаковые муфты прямого действия 6 и офатного действия 7, количество которы равно числу степеней свободы задающего |И исполнительного органов манипулятора, ;Муфты прямого и обратного действия через аналогичные шестерни 8-10 и валы 11 кинематически связаны .с соответствукоцими шарнирами степеней подвижности манипулятора.Первый двигатель 12 с муфтами 6 прямого действия, шестернями 8 образую первый силовой блок 13, а второй двигатель 14 с муфтами 7, обратного действи шестернями 9 образуют второй силовой блок IS, каждая из муфт прямого и об ратного действия имеет ведущую часть 16, жестко соединенную с выходным валом 17 или 18 .двигателя 12 или 14, и ведомую часть 19, кинематически связанную через шестерни .8 или 9, шестерню 10 и вал 11с соответствующим шарниром степени подвижности манипулятора, обмотку 20 управления, блок 21 управл ия.
Силовые блоки 13 и 15 установлены на основании 5 параллельно оси ротации задающего и исполнительного органов манипулятора.
Манипулятор работает следующим образом.
Как в исполнительном, так и в задающем органах манипулятора при вращении двигателей 12 и 14 вращаются ведущие Части 16 муфт 6 и 7 прямого и обратного действия, жестко связанные с выходными валами 17 и 18 двигателей.
При равенстве токов, протекающих в обмогках 20 управления муфт прямого и обратного действия, создается магнитное поле, взаимодействующее с ведомой ча- стью 19 муфт, в свою очередь создавая на них моменты, равные по величине, но противоположные по направлению, в результате чего шестерни 8-10, валы 11,
кинематически связанные с ними соответствующие шарниры степеней подвижности задающего и исполнительного органов манипулятора остаются неподвижными. При подаче управляющего сигнала на
одну обмотку 2О управления одной из муфт, например прямого действия 6, ток в обмотке управления увеличивается, и тем самым возрастает момент, создаваемый в ведомой части 19 , и при
помощи шестерен 8 и 10 и вала 11 передается на соответствующий шарнир степени подвижности задающего или исполнительного органов манипулятора. Формула изобретения
.Копирующий манипулятор, содержащий механическую руку, шарнирно соединенные звенья которой кинематически связаны с 5 силовым блоком, состоящим из двигателя и соединенных с его валом модулей, 4Hfcло которых равно щслу степеней свободы механической руки, каждый модуль снабжен электромагнитными муфтами прямого и обратного действия, отличающийс я тем, что, с целью повьпиения надежности и улучшения эксплуатационных качеств манипулятора, силовой блок снабжен вторым двигателем, электромагнитные 11уфты прямого и обратного действия; собраны в два блока, причем ведущие части муфт первого блока мсестко связаны с валом первого, а ведущие части второго блока - с валом второго двигателя.
Источники информации, принятые во внимание при экспертизе 1. Кулешов В. С. и Лакота Н. А. Динамика систем управления манипуляторами. М., 3нepгия 1971, с. 108-110, .рис. 2-13.
