(54) МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования | 1982 |
|
SU1068890A1 |
| МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1973 |
|
SU374578A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР ДЛЯ БУРОВОЙ МАШИНЫ | 1966 |
|
SU425165A1 |
| Экстремальный шаговый регулятор | 1972 |
|
SU468216A1 |
| Экстремальный регулятор режима обработки на металлорежущих станках | 1980 |
|
SU1015338A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Автоматический оптимальный регулятор | 1958 |
|
SU119019A1 |
| Экстремальный регулятор | 1976 |
|
SU634233A1 |
| Экстремальный регулятор | 1978 |
|
SU744452A1 |
1
Изобретение относится k экстремал.ному управлению многомерными объектами, и может быть использовано для построения многоканальных непрерывношаговых экстремальных регуляторов инерционных объектов, работающих при интенсивных монотонных возмущающих воздействиях.
Известны шаговые экстремальные регуляторы, осуществляющие ускорен-ный поиск экстремума 1.
Недостаток таких регуляторов сравнительно большое время поиска экстремума, обусловленное поисковым характером движения к экстремуму и большим количеством пробных шагов.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является непрерывношаговьШ экстремальный регулятор, содержащий последовательно соединенные блок формирования показателя экстремума, блок шагового поиска, блок перемены воздействий и блок перемены структуры, выходы которого через соответствующие исполнительные блоки соединены с соответствующими входами объекта регулирования, выходы которого соединены с соответствующими входами блока формирования показателя экстремума 2.
Недостаток этого регулятора - малое быстродействие.
Цель изобретения - повышение быстродействия, устойчивости поиска и точности обнаружения экстремума.
Поставленная цель достигается тем что. регулятор содержит блок оптимального подхода к области экстремума, блок сравнения и пороговый блок, вход блока шагового поиска через бло оптимизации подхода к области экстремума соединен со вторым входом блока перемены структуры, а через последовательно соединенные блок сравнения и пороговый блок - с третьим входом блока перемены структуры, выходы объекта регулирования соединены с соответствующими вторыми входами блока оптимизации подхода к области экстремума, генератор тактовых импульсов и последовательно соединенные блок формирования среднего.значения показателя экстремума, ключ и блок памяти, выход которого соединен со вторым входом блока сравнения и третьим входом блока оптимизации подхода к области экстремума, первый вход блока формирования среднео значения показателя экстремума оединен с- первым входом блока сравения, а второй вход - с выходом геератора тактовых импульсов и вторым ходом ключа.
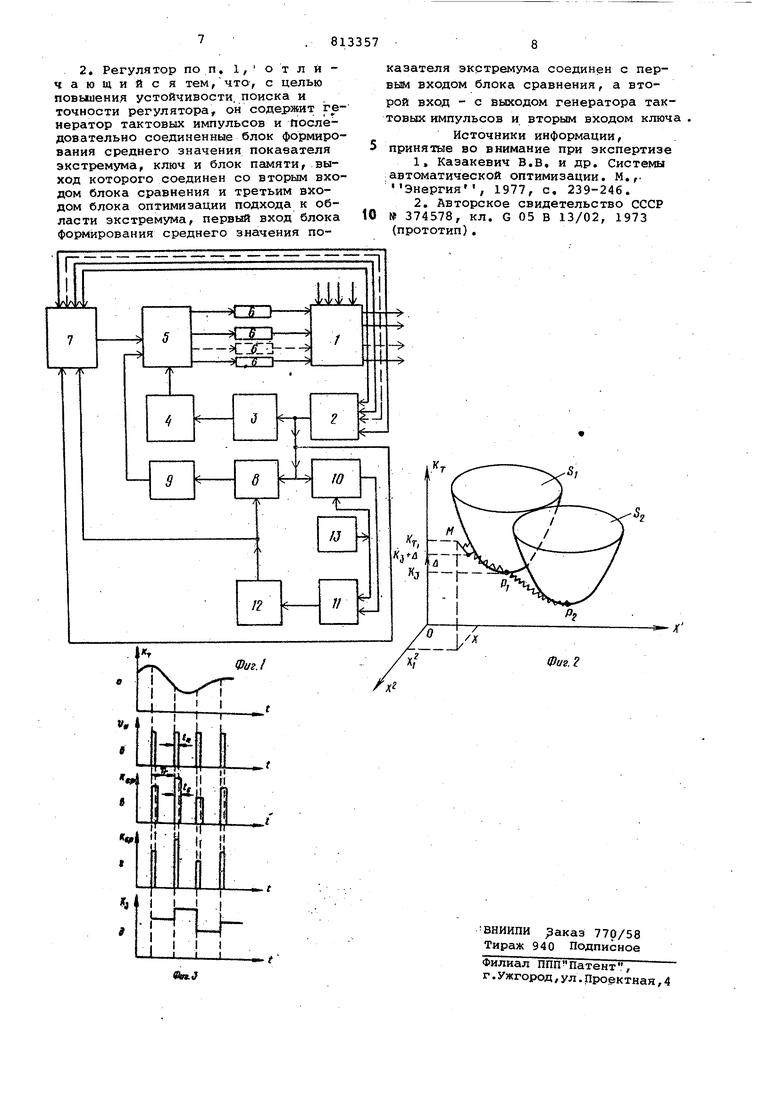
.На фиг. 1 представлена блок-схема ногоканального непревынающёго регуятора; на фиг. 2 и 3 - принципы раоты регулятора.
Многоканальный непрерьшношаговый регулятор содержит объект 1 регулирования, блок 2 формирования показателя экстремума, входы которого соединены с выходами объекта 1 регулирования, а выход подключен к последовательно соединенным-блоку 3 шагового поиска и блок 4 перемены воздействий, выход которого соединен с одним из входов блока 5 перемены структуры, соединенного с исполнительными блоками б, воздействующими на объект 1 регулирования, блок 7 оптимального подхода к области экстремума, последовательно соединенные элемент 8 сравнения и пороговый блок 9, выход которого соединен с одним из входов блока 5 перемены структуры, другие входы которого соединены с выходом блока 4 перемены воздействий и выходом блока 7 оптимального подхода к области экстремума, входы которого соединены с соответствующими выходами объекта 1 регулирования и выходом блока 2 формирования показателя экстремума, причем на вход элемента 8 сравнения и вход-блока 7 оптимального подхода к области экстре- . мума непрерывно поступает сигнал, пропорциональный заданному значению показателя экстремума, а также блок 12 памяти, выход которого соединен с входом элемента 8 сравнения и входом блока 7 оптимального подхода к области экстремума, а вход через ключ 11 соединен с выходом блока 10 формирования среднего значения показателя экстремума, вход которого соединен с выходом блока 2 формирования показателя экстремума и выходом генератора 13 тактовых импульсов, выход которого также подключен к входу ключа 11.
Рассмотрим работу регулятора, имеющего два канала управления х . В начальный момент состояние объекта 1 управления характеризуется входными коорданатами Х i выходной координатой блока 2 формирования показателя экстремума (точка М на фиг. 2).
П ример 1. Во время работы регулятора при поиске минимума текущего значения показателя экстре- мума К (например, для добывающего комбайна это энергоемкость процесса разрушения угля, потери в электродвигателе исполнительного механизма и т.д.). Па элемент 8 сравнения с блока 7 формирования показателя экстремума поступает текущее значение показателя экстремума К j- , которое сравнивается с заданным значением показателя экстремума К , определенным по прёдьщущей работе регулятора. При выполнении неравенства
(1)
т, К + д
где л - зона нечувствительности порогового блока 9)элемент 8 сравнения подает сигнал на срабатывание порогового блока 9, который подает команду на блок 5 переключения структуры, отключающий блок 3 щагового поиска и подключающий к исполнительным устройствам 6 блок7 оптимального подхода к области экстремума. Исполнительные устройства отрабатывают траекторию оптимального по быстродей,ствию подхода из точки М (фиг. 2) в точку заданного показателя экстремум Кз (точка Р.;, на фиг. 2) определяемую блоком 7 оптимального подхода к области экстремума.
Пример 2. Работа блока 7 оптимального подхода к области екстремума при частотном управлении добычным комбайном. Электромеханическая система частотноуправляемого асинхронного двигателя - исполнительного механизма - описывается совокупностью следующих Дифференциальных уравнений
Vus/Ли н .
Ч% ( .
-. Ч--(/ у-/с} Р.Ч .
где V
чу vy Ш
- составляющие
SV I ги f-v потокосцепления статора и ротора по осям и и V;
-относительное значение частоты тока в статоре;
-ссставляюш.ие напряжения на статоре по осям U и V;
, ,
-соответственно угловые скорости вращения дв-игателя и исполнительного механизма;
-синхронная угловая частота
н вращения;
3 lO.j, - соответственно моменты инеции двигателя и исполнительного механизма;
tv
-момент сил упругости в трансмиссии;
z
-момент возмущающих сил нагрузки на исполнительном механизме
fa
-приведенная жесткость I I трансмиссии;
Svi rv4-1 si 1 Р - параметры двигателя . Решая задачу синтеза управления оптимально по быстродействию получим закон управления частотой с«;(х ) и напряжением U () : c rv C +J r-Vb) dL-dpи ::SUP Ug А - постоянная величина, зависящая от начального и заданного значения показателяэкстремума;V - область управления. Задание частоты и напряжения на двигатель по co-ojrHomeHHHM (3) и (4) обеспечивает оптимальную траекторию движения к заданному значению показа теля экстремума. При подходе к области экстремума текущее значение показателя экстремума К меньше (точка N на фиг 2), происходит обратное срабатывание порогового блока 9 и блок 5 перемены структуры отключает блок 7 и подключает через блок 4 переключения воздействия блок 3 шагового поиска. Далее осуществляется обычный шаговый поиск экстремума, причем закон подключения исполнительных устройств б задается блоком перемены воздействий 4. Блок -5 перемены структуры подключает блок 7 оптимального подхода к области экстремума только на определенное заданное время, по истечении которого он автоматически отключается и подключается блок 3 шагового поиска; тем самым повышается устойчи воеть работы регулятора. Под воздействием возмущений F F,, F происходит монотонный дрейф экстремума, например, в точку P/i (фиг, 2). С целью повышения ус тойчивости поиска и точности обнаружения экстремума в регуляторе производится коррекция величины заданного .для следующего этапа значения показателя экстремума К , учитывающая монотонный дрейф.статической характеристики объекта. Для этого в npone се работы экстремального регулятора на вход блока 10 формированиясреднего значения показателя экстремума с блока 2 формирования показателя экстремума непрерывно поступает текущее значение показателя екстремума К (фиг. 3,а). При поступлении импульса длительностью t,j. с генератора 13 тактовых импульсов (фиг.2,б) на вход блока 10 формирования среднего значения-показателя экстремума с его выхода на вход ключа 11 поступает импульс длительностью t, и ампл тудой равной среднему значению показателя экстремума за период между тактовыми импульсами Ту (Фиг. 3,в при этом , но tf-«T.. . Одновременно на вход ключа 11 поступает выходной импульс генератора тактовых импульсов 13 (Фиг.3,6), ключ 11 замыкается и подключает на время t выход формирователя среднего значения показателя экстремума 10 к входу блока 12 памяти (фиг. 3,г), в котором происходит запоминание амплитуды выходных импульсов блока 10 формирования среднего значения показателя экстремума. В связи с этим выходное напряжение блока L2 памяти, пропорциональное среднему значению показателя экстремума за период между тактовыми имйульсами, поступает на вход элемента 8 сравнения (фиг. 3,д). Таким образом, в процессе работы регулятора производится самонастройка значения задаваемого показателя .„ экстремума, что позволяет повысить устойчивость поиска и точность обнаружения экстремума. Использование априорной информации об экстремальном значении показателя экстремума позволяет уменьшить время поиска экстрем ма после включения регулятора в работу и при выходе его в процессе работы из заданной области экстремума под действием возмущающих воздействий. Применение предлагаемого изобретения для оптимизации режима работы горной машины увеличивает производительность и уменьшает износ рабочих элементов машины на 20-30%. Формула изобретения 1. Многоканальный непрерывношаговый экстремальный регулятор, содержащий последовательно соединенные блок формирования пок-азателя экстрем ма, блок шагового поиска, блок перемены воздействий и блок перемены структуры, выходы которого через соответствующие исполнительные блоки соединены с соответствующими входами объекта регулирования, выходы которого соединены с соответствующими входами блока формирования показателя экстремума, отличающийс я тем, что., с целью повышения быстродействия регулятора, он содержит блок оптимального подхода к области экстремума блок сравнения и пороговый блок, вход блока шагового поиска через блок оптимизации подхода к области екстремума соединен со вторым входом блока перемены структуры, а через последовательно соединенные. блок сравнения и пороговый блок - с третьим входом блока переены структуры, вьгходы о.бъекта регуирования соединены с соответствуюими вторыми входами блока оптимизаии подхода к обла.рти экстремума.
Источники информации, принятые во внимание при экспертизе
1,Каэакевич В.В, и др. Системы автоматической оптимизации. М.,. Энергия, 1977, с. 239-246.
