1
Изобретение относится к радиотехнике и может быть использовано при фильтрации результатов измерений физического параметра, выраженного цифровым кодом.
По основному авт. св. № 499647 известен нелинейный цифровой фильтр, содержащий последовательно соединенные блок сравнения, двусторонний ограничитель, сумматор и нерекурсивный фильтр, выход которого подключен к дополнительным входам сумматора и блока сравнения fl.
Недостатком этого устройства является относительно низкая точность фильтрации при переменной точности измерений и наличие пачек аномальных ошибок намерений .
Цель изобретения - повьцнение точности фильтрации.
Для этого в нелинейном цифровом фильтре, содержащем последовательно включенные блок сравнения, двусторонний ограничитель, сумматор и нерекурсивный фильтр, выход которого подключен к
допопнительн1ым входам сумматора и блка сравнения, между выходом двустороннего ограничителя и дополнительным входом.сумматора включены последовательно квадратор, дополнительный нерекурсивный фильтр и датчик случайных чисел, другой вход которого соединен с дополнительным выходом двустороннего ограничителя, к дополнительному входу которого подключен выход дополнительного нерекурсивного фильтра.
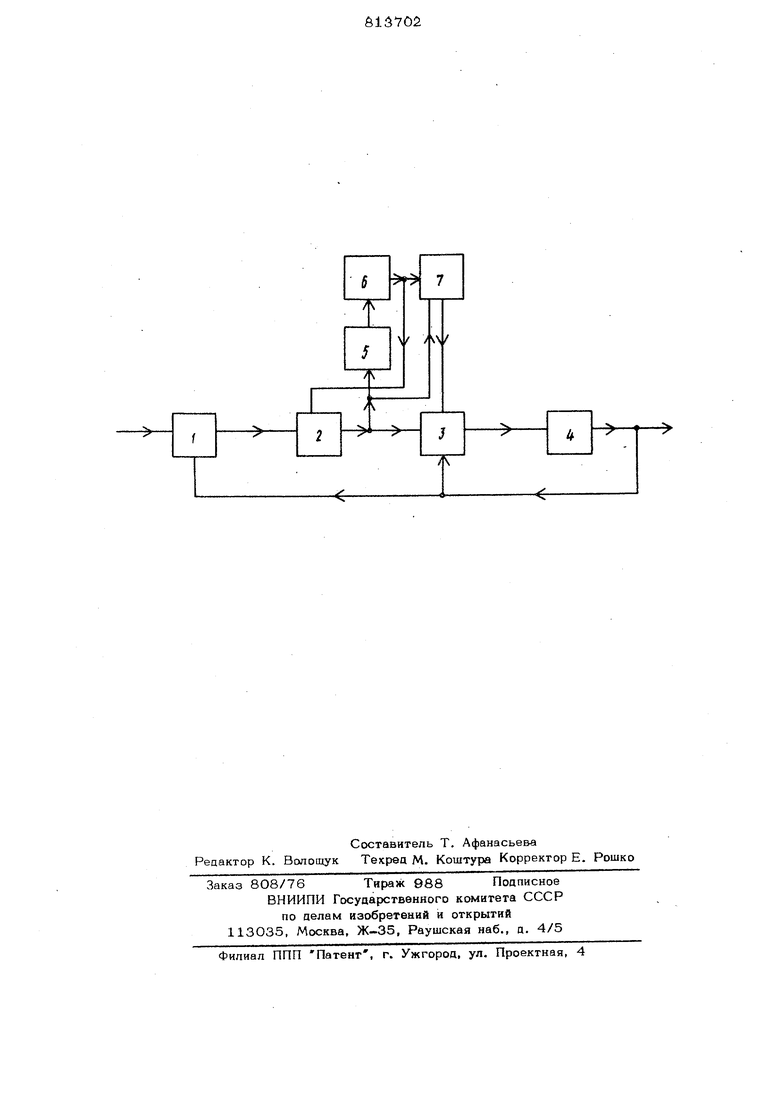
На чертеже представлена структурная электрическая схема нелинейного цифрового фильтра.
Он содержит последовательно соединенные блок сравнения 1, двусторонний ограничитель 2, сумматор 3 и нерекурсивный фильтр 4, выход которого подключен к другим входам блока сравнения 1 и сумматора 3, а также последовательно соединенные квадратор 5, дополнительный нерекурсивный фильтр 6 в датчик случайных чисел 7, выход котсяэого подключен ко второму дополнительному входу сумматора 3, причем вход квааратора 5 подключен к цопол- нителыюму выходу двустороннего ограличителя 2, а выход дополнительного нерекурсивного фильтра 6 - к дополнительному входу двустороннего ограничителя 2, допачнительный выход которого подключен ко входу датчика случайных чисел 7. Нелинейный цифровой фильтр работает следующим образом. В установившемся режиме при отсутствии аномальных искажений и постоянно точности измерений результаты измерени через блок сравнения 1, двусторонний ограничитель 2 и сумматор 3 поступают в нерекурсивный фильтр 4, который работает как обычный усреднитель. При этом отрицательная обратная связь от нерекур сивного фильтра 4 к блоку сравнения 1 компенсируется положительной обратной связью от нерекурсивного фильтра 4 к сумматору 3. В этом случае на выходе нерекурсивного фильтра 4 имеем скользящую интервальн то оценку величины измеряемого параметра по результатату некоторого числа измерений. Одновремен но с этим сигнал с дополнительного выхода двустороннего ограничителя 2 посту пает на вход квадратора 5, в котором результаты измерений возводятся в квадрат. Сигнал с выхода квадратора 5 посту пает в дополнительный нерекурсивный .фильтр 6, на выходе которого имеет скол зящую интервальную оценку дисперсии из мерений, которая подается на дополнител ный вход двустороннего ограничителя 2 и на вход датчика случайных чисел 7. При измерении величины дисперсии измерений, т. е. при измерении точности измерений, значения порогов ограничи геля 2 регулируются в соответствии с подаваемым на его дополнительный вход сигналом с выкода дополнительного нерекурсив ного фильтра G. Таким образом реализуется адаптивность к переменной точности измepeниЙJ что ведет к повышению точности фильтрации. В то же время, если на вход фильтра поступает результат из- мерений с аномальной оишбкой, то в двустороннем ограничителе 2 происходит превышение входным си1 налом соответственно верхнего или нижнего порога ограничителя 2. В этом случае со второго дополнительного выхода ограничителя 2 подается сигнал на дополнительный вход датчика случайных чисел 7, который запускает этот датчик. Сигнал с выхода последнего подается на вход сумматора 3. Таким образом аномальная ошибка заменяется сигналом из датчика случайных чисел и, поскольку на вход датчика 7 поступает сигнал от дополнительного нерекурсив- ного фильтра 6, то статистические характеристики сигнала на выходе датчика 7 совпайают со статистическими характеристиками результатов измерений. При этом соответствующий сш-пал в вице результата измерения с аномальной ошибкой на вход сумматора 3 из цвусторонне- го ограничителя 2 не поступает. В результате при фильтрации последуюлШх результатов измерений на результаты интервальных оценок аномальные ошибки скааываться не будут. Формула обретен Нелинейный цифровой фильтр по авт.св. №499647, отличающийся тем, что, с целью повышения точности фигтьтрации, между выходом доустороннего ограничителя и цогюлнительным входом умматора включены послецовательно квадратор цополнительныи нерекурсивный фильтр и датчик случайных чисел, аругой вход которого соединен с дополнительным выходом двустороннего ограничителя, к дополнительному входу которого подключен выход дополнительного нерекурсивного фильтра. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельствоо СССР № 499647, кл. И ОЗ Н 7/28, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный цифровой фильтр | 1979 |
|
SU813701A2 |
| Нелинейный цифровой фильтр | 1981 |
|
SU1042162A2 |
| Нелинейный цифровой фильтр | 1980 |
|
SU928614A2 |
| Нелинейный цифровой фильтр | 1980 |
|
SU951654A2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU871302A2 |
| Нелинейный цифровой фильтр | 1982 |
|
SU1058030A2 |
| Нелинейный цифровой фильтр | 1980 |
|
SU951653A2 |
| Цифровой фильтр | 1979 |
|
SU807486A1 |
| Нелинейный цифровой фильтр | 1981 |
|
SU959267A1 |
| Нелинейный цифровой фильтр | 1979 |
|
SU871303A2 |