(5) НЕЛИНЕЙНЫЙ ЦИФРОВОЙ ФИЛЬТР
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный цифровой фильтр | 1979 |
|
SU813702A2 |
| Нелинейный цифровой фильтр | 1981 |
|
SU1042162A2 |
| Нелинейный цифровой фильтр | 1981 |
|
SU1003339A2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU813701A2 |
| Нелинейный цифровой фильтр | 1980 |
|
SU951654A2 |
| Нелинейный цифровой фильтр | 1980 |
|
SU951653A2 |
| Нелинейный цифровой фильтр | 1989 |
|
SU1713089A1 |
| Нелинейный цифровой фильтр | 1982 |
|
SU1058030A2 |
| Цифровой рекурсивный фильтр | 1982 |
|
SU1046916A1 |
| Нелинейный цифровой фильтр | 1979 |
|
SU871302A2 |
1
Изобретение относится к радиотехнике и может быть использовано при фильтрации результатов измерений физического параметра, выраженного j цифровым кодом.
По основному авт. св. tf 813702 известен нелинейный цифровой фильтр, содержащий последовательно соединенные блок сравнения, двусторонний ограничитель, сумматор и нерекурсивный фильтр, выход которого подключен к другим входам блока сравнения и сумматора, а также последовательно соединенные квадратор, дополнительный нерекурсивный фильтр и датчик случайных чисел, выход которого подключен ко второму дополнительному входу сумматора, причем вход квадратора Подключен к дополнительному выходу двустороннего ограничителя, а выход дополнительного нерекурсивного фильтра - к дополнительному входу двустороннего ограничителя, дополнительный выход которого под(ЗИйчен ко входу датчика случайных чисел tl3Недостатком этого устройства является относительно низкая точность фильтрации при переменном характере закона распределения ошибок измерений .
Целью изобретения является повы- шение точности фильтрации.
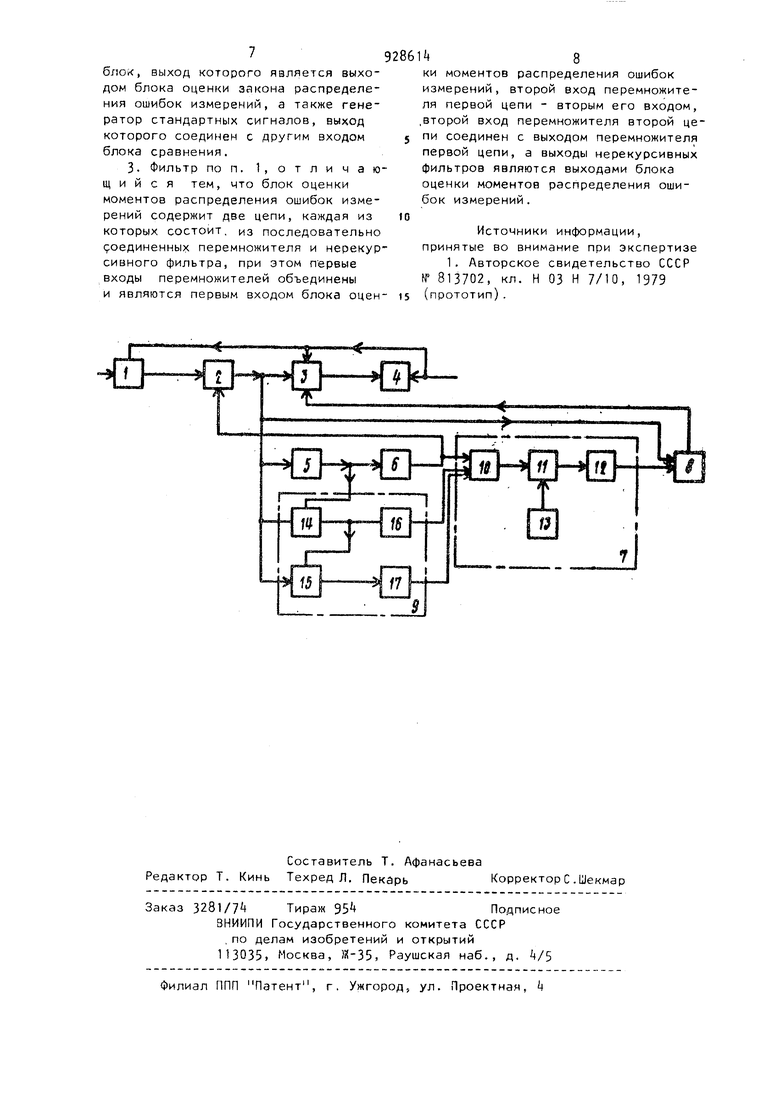
Поставленная цель достигается тем, что в нелинейном цифровом фильтре, содержащем последовательно соединенные блок сравнения, двусторонний ограничитель, сумматор и нерекурсивный фильтр, выход которого подключен к другим входам блока сравнения и сумматора, а также последовательно соединенные квадратор, дополнительный нерекурсивный фильтр и датчик случайных чисел, выход которого подключен ко второму дополнительному входу сумматора, причем вход квадратора подкгиочен к дополнительному выходу двустороннего ограничителя, а выход допол НИтельного нерекурсивного фильтра - к дополнительному входу двустороннего ограничителя, дополнительный выход которого подключен ко входу датчика случайных чисел,меж ду выходом дополнительного нерекурсивного фильтра и входом датчика случайных чисел включен блок оценки закона распределения ошибок измерений, а между выходом двустороннего ограничителя и другими входами блока оценки закона распределения ошибок измерений включен блок оценки моментов распределения ошибок измерений, другой вход которого подключен к выходу квадратора. При этом блок оценки закона распределения ошибок измерений содержит последовательно соединенные вычислитель коэффициентов, вход которо го является входом блока оценки зако на распределения ошибок измерений, элемент сравнения и решающий блок, выход которого является выходом блока оценки закона распределения ошибок измерений, а также генератор стандартных сигналов, выход которого соединен с другим входом блока сравнения . Кроме того, блок оценки моментов распределения ошибок измерений содер жит две цепи, каждая из которых состоит из последовательно соединенных перемножителя и нерекурсивного фильт ра, при этом первые входы леремножителей объединены и являются первым входом блока оценки моментов распределения ошибок измерений, второй вход перемножителя первой цепи - вто рым его входом, второй вход перемножителя второй цепи соединен с выходом перемножителя первой цепи, а выходы нерекурсивных фильтров являются выходами блока оценки моментов распределения ошибок измерений. На чертеже представлена структур ная схема нелинейного цифрового фил ра. Нелинейный цифровой фильтр содер жит последовательно соединенные бло сравнения 1 , двусторонний ограничитель 2, сумматор 3 и нерекурсивный фильтр А, выход которого подключен другим входам блока сравнения 1 и с матора 3, последовательно соединенные квадратор S, Рход которого подключен к выходу двустороннего огран чителя 2, нерекурсивный фильтр 6, блок оценки закона распределения 44 ошибок измерений 7 и датчик случайных чисел 8, выход которого подключен к другому входу сумматора 3, а также блок оценки моментов распределения ошибок измерений 9. выходы которого подключены к выходу двустороннего ограничителя 2 и квадратора 5, а выход подключен ко входу блока оценки закона распределения ошибок измерений 7, при этом выход двустороннего ограничителя 2 подключен к другому входу датчика случайных чисел 8, а выход нерекурсивного фильтра 6 - к другому входу двустороннего ограничителя 2. Блок оценки закона распределения ошибок измерений 7 содержит последовательно соединенные вычислитель коэффициентов 10, элемент сравнения 11 и решающий блок 12, а также генератор стандартных сигналов 13, выход которого подключен к другому входу элемента сравнения 11. Блок оценки моментов распределения ошибок измерений 9 содержит первую и вторую цепи, каждая из которых содержит перемножитель Ц (l5) и нерекурсивный фильтр 16 (17), при этом выход перемножителя 14 первой цепи подключен к входу перемножителя 15 второй цепи. Нелинейный цифровой фильтр работает следующим образом. В установившемся режиме при отсутствии аномальных искажений результаты измерений через блок сравнения 1, двусторонний ограничитель 2 и сумматор 3 поступают в нерекурсивный фильтр 4, который работает как обычный усреднитель. При этом отрицательная обратная связь от нерекурсивного фильтра Ц к блоку сравнения 1 компенсируется положительной обратной связью от нерекурсивного фильтра 4 к сумматору 3- В этом случае на выход нерекурсивного фильтра 4 имеем скользящую интервальную оценку величины измеряемого параметра по результатам некоторого числа измерений. Одновременно с этим сигнал с выхода двустороннего ограничителя 2 поступает на вход квадратора 5 а из него - в нерекурсивный фильтр 6, на выходе которого имеем скользящую интервальную оценку второго момента гП) (дисперсии) ошибок измерений, которая подается в блок оценки закона распределения ошибок измерений J и на управляющий вход двустороннего ограничителя 2 для регулировки значений верхнего и нижнего порогов ограничителя. При измерении величины дисперсии измерений, т.е. при изменении точности измерений, значения порогов двустороннего ограничителя 2 регулируются в соответствии с пода ваемым на его дополнительный вход сигналом с выхода нерекурсивного фильтра 6. Таким образом, реализуется адаптивность к переменной точности измерений, что ведет к повышению точности фильтрации. Сигналы с выхода двустороннего ог раничителя 2 поступают также в перемножители k и 15, причем на второй вход перемножителя 14 поступает сигнал с выхода квадратора 5 а на вход перемножителя 15 поступает сигнал с выхода перемножителя 14.Сигналы с выходов перемножителей И и 15 поступают на вход соответствующих нерекурсивных фильтров 16 и 17, кото рые работают как обычные усреднители Сигналы с выхода нерекурсивного фильтра 16, представляющие собой интервальную скользящую оценку третьего момента mj закона распределенйя ошибок измерений, и сигналы с выхода нерекурсивного фильтра 17, представляющие собой интервальную скользящую оценку четвертого момента m . закона распределения ошибок измерений 7, в {котором сигналы с выходов нерекурсивных фильтров 6, 16 и 17, равные гпл, т „-и т. соответственно, используются в вычислителе коэффициентов 10 для формирования сигналов 0,0 о, | Э , (bQ , которые поступают в элемент сравнения 11. На другой вход элемента сравнения 11 поступает сигнал от генератора стандартных сигналов 13. По значениям коэффициентов 1.и р может быть определен вид распределения ошибок измерений. Для этого генератор стандартных сигналов 13 формирует сигналы, которые для каждой из кривых Пирсона соответствуют возможI -- . ным измерениям коэффициентов |J и )5-. В элементе сравнения 11 эти сигналы сравниваются с сигналами из вычислителя коэффициентов 10, на чего в решающем блоке 12 формируется сигнал решения о виде распределения ошибок измерений. Сигнал решения поступает на вход датчика случайных чисел 8, в соответствий с которым происходит его перестройка U6 таким образом, чтобы статистика сигналов на его выходе соответствовала статистике, определенной в блоке 7« В частном случае блок (8) может представлять набор датчиков случайных чисел с .различными статистиками распределений . При наличии аномальных искажений измеряемого параметра, когда сигнал с выхода блока сравнения 1 превышает верхний или становится меньше нижнего порога ограничений двустороннего ограничителя 2, то сигнал с выхода двустороннего ограничителя 2 в сумматор 3 не поступает, а поступает на управляющий вход датчика случайных чисел 8. Тогда датчик 8 срабатывает и сигнал с его выхода поступает на вход сумматора 3. Таким образом происходит замена аномального искаженного результата измерений сигналом от датчика случайных чисел, имеющего ту же статистику распределений, что и ошибки измерений. Поэтому благодаря введению новых блоков и связей повышается точность фильтрации, поскольку обеспечивается перестройка статистики сигнала на выходе датчика случайных чисел в соответствии с оценками закона распределения ошибок измерений. Формула изобретения 1.Нелинейный цифровой фильтр по авт. св. № 813702, отличающийся тем, что, с целью повышения точности фильтрации, между выходом дополнительного нерекурсивного фильтра и входом датчика случайных чисел включен блок оценки закона распределения ошибок измерений, а между выходом двустороннего ограничителя и другими входами блока оценки закона распределения ошибок измерений включен блок оценки моментов распределения ошибок измерений, другой вход которого подключен к выходу квадратора. 2.фильтр по п. 1,отличающ и и с я тем, что блок оценки закона распределения ошибок измерений содержит последовательно соединенные вычислитель коэффициентов,вход которого является входом блока оценки закона распределения ошибок измерений, элемент сравнения и решающий
79
бло, ВЫХОД которого является выходом блока оценки закона распределения ошибок измерений, а также генератор стандартных сигналов, выход которого соединен с другим входом блока сравнения.
ки моментов распределения ошибок измерений, второй вход перемножителя первой цепи - вторым его входом, .второй вход перемножителя второй цепи соединен с выходом перемиожителя первой цепи, а выходы нерекурсивных фильтров являются выходами блока оценки моментов распределения ошибок измерений.
Источники информации, принятые во внимание при экспертизе
