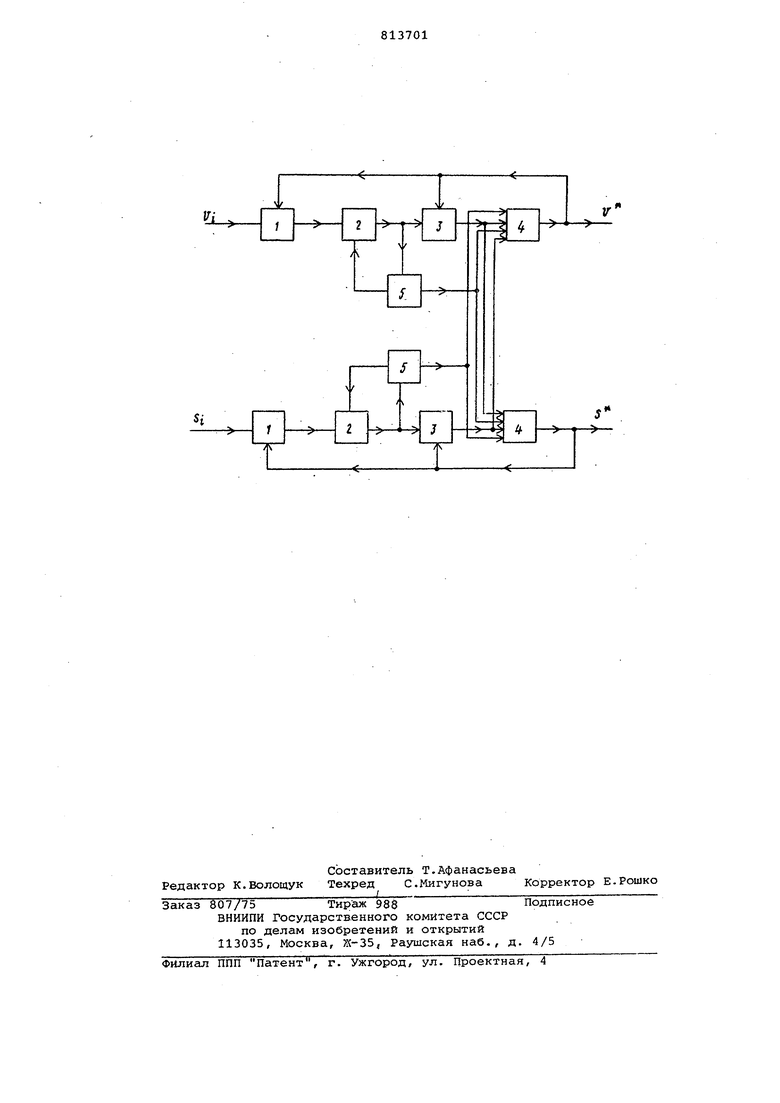
(54) НЕЛИКЕЙНЫП ЦИФРОВОЙ ФИЛЬТР со:еддинен с другим сигнальным вкодом дополнительного нерекурсивного фильтра а выход дополнительного сум матора - с другим сигнальным входом нйрекурсивного фильтра. На чертеже представлена структурная электрическая схема нелинейного цифрового фильтра. Устройство содержит две цепи, каж дая из которых состоит из после,цо вательно соединенных блока сравнения 1, двустороннего ограничителя 2, сумматора 3 и нерекурсивногсз фильтра 4, выход которого подключён к другим вход,ам соответствующего ему блока сравнения 1 и сумматора 3, а также блока оценки 5 дисперсии измерений, вход которого пЬдключен к выходу соответствующего ef-r/ двустороннего ограничителя 2|, первый выход - ко входу соответствующего двустороннего ограничителя 2 , а второй выход - к управляюиим входам Ешрекурсивных фильтров 4, причем выход су 5матора 3 каждой из цепей подключен к другому снгиальному входу нерекурсивного ф1-5льт р а. 4 д ру го и це п к Устройство работает следуюпим образом. В установившемся режиме при отсутствии аномальных искаясений измер;яемых параметров, а также при постоянных дисперсиях ошибок иэмерзний результаты измерений скорости и дальности S в времени t i поступают на входы цифрового фильтра. Примем, что измерения дальности S, и скорости Vj в мо Ненты времени являются несмеиденн;ыми и проводятся с ошибкой, характеризуклдейся дисперсиями 65и б у соответственно. При этом значения Vf и S} через соответствующие их каналам блок сравнения 1, двусторонний ограничитель 2, cy iмaтop 3 поступают на входы нерекурсивных филь тров 4. На выходе одного нерекурсив ного фильтра 4 цепи фильтрации измерения скорости V j имеет скользярду оценку скорости v , а. на выходе нерекурсивного фильтра 4 цепи фильтра ции измерения дальности оценку дсшьности S . При этом в ка:«дой цеп отрицательная обратная связь от нерекурсивного фильтра 4 к блоку срав нения 1 компенсируется положительно обратной связью от нерекурсивного фильтра 4 к сумматору 3. При появле нии аномальных ошибок измерений дву сторонний ограничитель 2 ограничива их сверху и снизу. Одновременно с этим с выхода двустороннего ограничителя 2 сигнал поступает на вход блока оценки 5 дисперсии измерений, в котором производится интервальная скользящая оценка дисперсии ошибок измерений. Этот блок оценки 5 может представлять собой последовательно соединенные квадратор и усреднитель. Сигнал с выхода блока оценки 5 подается ка вход двустороннего ограничителя 2 соответствующей цепи фильтрации и на входы нерекурсивных фильтров 4. Если дисперсии ошибок измерений изменяются, то изменяются в соответствии с этим и пороги ограничений-ограничителей 2, а также вносятся поправки в значения выходных сигналов генераторов стандартных сигна,лов нерекурсивных фильтров 4, что соответствует изменению постоянных коэффициентов, являющихся функцией б ь ,v , I-. , ti , где k - корреляционный моменту t| - текущий момент времени. В соответствии с этим повышается точность фильтрации. Формула изобретения Нелинейный гщфровой фильтр по авт. св. № 499647, о т л и ч а ющ и и с я тем, что, с целью повышения точности фильтрации, в него введены последовательно включенные дополнительный сравнения, дополнительный двусторонний ограничитель, дополнительный сумматор и дополнительный нерекурсивный фильтр, выходкоторого подключен к другим входам дополнительного блока сравнения и дополнительного cyMiviaTOpa, между выходом и входом двустороннего ограничителя включен первый блок оценки дисперсии измерений, выход которого соединен с первыми управляющими входами нерекурсивных фильтров , а между выходом и входом дополнительного двустороннего ограничителя включен второй блок оценки дисперсии измерений, выход которого подключен ко вторым управляквдим вход1р.м нерекурсивных фильтров, причем выход сугяматора соединен с другим сигнальным входом дополнительного нерекурсивного фильтра, а выход дополнительного сумматора - с другим сигнальным входом нерекурсивного фильтра . Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 499647, кл. Н 03 Н 7/28, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный цифровой фильтр | 1979 |
|
SU871302A2 |
| Нелинейный цифровой фильтр | 1981 |
|
SU1003339A2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU813702A2 |
| Нелинейный цифровой фильтр | 1982 |
|
SU1058030A2 |
| Нелинейный цифровой фильтр | 1980 |
|
SU928614A2 |
| Нелинейный цифровой фильтр | 1979 |
|
SU871303A2 |
| Цифровой рекурсивный фильтр | 1982 |
|
SU1046916A1 |
| Нелинейный цифровой фильтр | 1987 |
|
SU1499429A2 |
| ЦИФРОВОЙ ФИЛЬТР | 2001 |
|
RU2183046C1 |
| Нелинейный цифровой фильтр | 1980 |
|
SU951654A2 |