1
Изобретение относится к горному делу, а именно, к механизированным комплексам для выемки угля из пологих пластов со сложной гипсометрией.
Известен механизированный комплек для выемки полезного ископаемого, состоящий из изгибающего конвейера с направлякяцими лыжами и секций крепи оградительно-поддерживающего типа, включающих основание, гидростойку., домкрат передвижения Ij.
Однако при работе крепи на слабых почвах носок основания уходит вниз и расцепляется с направляющими лыжами конвейера. В этом случае при передвижке крепи или конвейера носок основания заходит под лыжу. Такое положение крепи приводит к значительным простоям высокопроизводительного комплекса.
Наиболее близким решением по технической сущности и достигаемому результату является механизированный комплекс для выемки полезного ископаемого, включающий секции крепи, основания которых установлены с возможностью взаимодействия с направляющими лыжами изгибающегося конвойера, имеющего став, и связаны с
конвейером двумя гидродомкратами передвижки.
Этот механизированный комплекс имеет два домкрата передвижки, которые при расцеплении носка основания с направлякяцими лыжами конвейера могут при передвижке направить основание в исходное положение, например за счет раздельного управления каждым домкратом 2.
Недостатком такого выполнения является то, что нет контакта основани с направляющими лыжами конвейера,
15 при перепадах почвы для конвейера и носка оснований, отсутствуют указатели положения носка основания по отношению к конвейеру и отсутствуют устройства, препятствующие подъему
20 конвейера в конце передвижки, что приводит также к расцеплению оснований с направляющими.
Эти недостатки вызывают дополнительные затраты времени на выправление оснований., что снижает производительность механизированного комплекса.
Цель изобретения - улучшение взаимодействия крепи и конвейера пр
30 сложной гипсометрии пласта.
Указанная цель достигается тем, что основание крепи вьополнено с передним и-образным выступом, вершина которого направлена по направлению передвижки крепи, а ширина выступа больше ширины основания секции крепи, и двумя боковыми выступами, расположенными с возможностью их взаимодействия при развороте секции крепи с домкратами передвижки, которые закреплены на конвейере ниже его става,
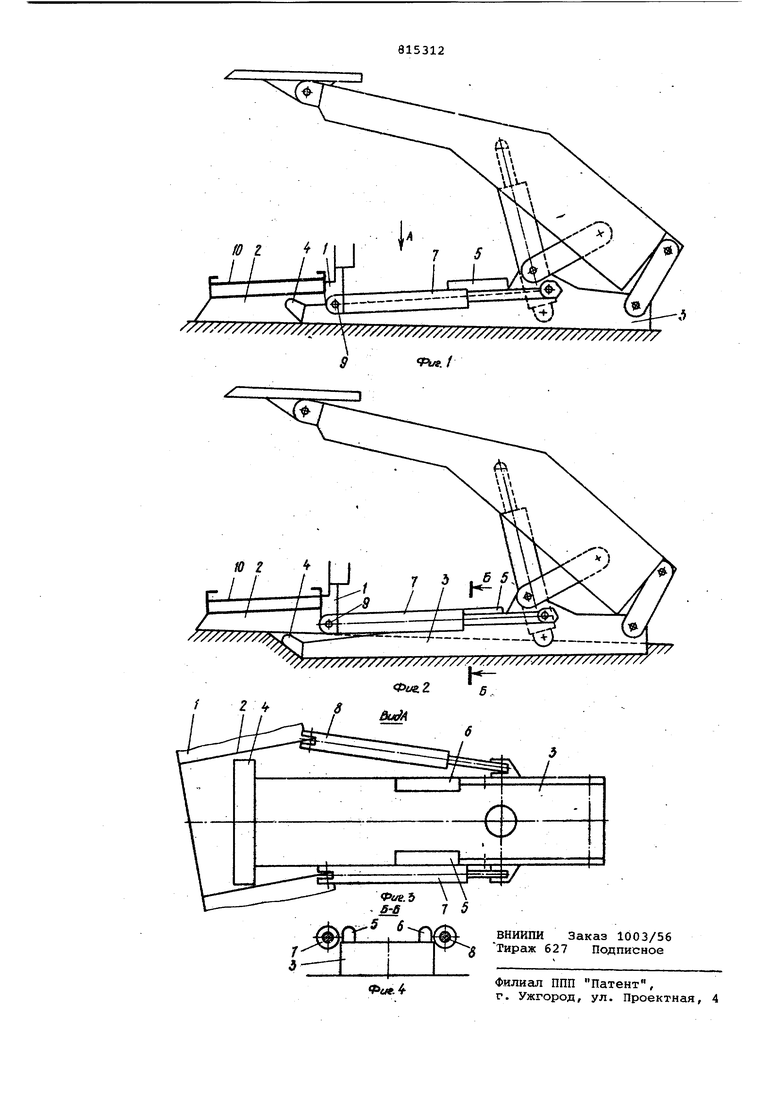
На фиг. 1 изображена механизированная крепь, общий вид; на фиг. 2 то же, при сложной гипсометрии; на фиг. 3 - вид А на ФРГ. 1, на фиг.4 разрез Б-Б на фиг. 2.
Механизированный комплекс для выемки полезного ископаемого состоит из изгибающегося конвейера 1 с направляющими лыжами 2 и однотипных секций крепи, включающих основания 3, имеющие передний U-образный высту 4 и два боковых выступа 5 и 6, домкратов передвижения 7 и 8, точки крепления 9 которых расположены ниже става 30.
При передвижке креци за счет сокращения домкратов передвижения 7 и 8 секции крепи подтягиваются к конвейеру 1, при этом передний выступ 4 касается направляющих лыж 2 конвейера 1 и разворачивает основание 3 в определенном направлении.
Передний выступ 4 препятствует выходу штыба на основание 3 и не дает ему заходить под домкраты передвижения 7 и 8, тем самым уменьшая объем работ по зачистке.
Механизированный комплекс работает следующим образом.
Передвижка конвейера 1 происходит за счет раздвижки домкратов 7, причем она идет волной, так как домкраты передвижения 7 включаются на определенном участке. При этом направлякидие лыжи 2 конвейера 1 поворачивак)тся относительно переднего выступа 4, а так как он шире корпуса основания 3, то. последний не препятствует изгибу конвейера 1.
Домкраты передвижения 7 и 8 закреплены на конвейере 1 так, что ось крепления 9 расположена ниже става 10 конвейера 1. Такое наклонное расположение домкратов передвижения 7 и 8 прижимает конвейер 1 к почве при его передвижении / препятствует его подъему на штыб, тем самым не дает расцепляться направлякяцим лыжам 2 с основанием 3.
При сложной гипсометрии, когда передний выступ 4 расцеплен с направляющими лыжами 2 конвейера 1,
передвижка крепи происходит следующим образом. Направление секции в случае ухода основания влево происходит за счет контакта бокового выступа 5 с домкратом 7, а в случае . ухода основания вправо - за счет бокового выступа 6 с домкратом 8. При этом оператор определяет по положению выступов 5 и 6 относительно домкратов 7 и 8, где находится передний выступ 4 и, в необходимых случаях, за счет отключения одного из домкратов 7 или 8 разворачивает основания вправо или влево. В конце передвижки передний выступ 4 основания 3 поднимается. Подъем основания
5 происходит за счет достаточного усилия домкратов 7 и 8, причем секция в этом случае разгружена от горного давления. Во время подъема основания 3 передний выступ 4 входит в зацепление с направляющими лыжами 2 . конвейера 1. Причем, за счет углублений в корпусе основания зацепление происходит даже при наклоне в горизонтальной плоскости секции крепи
5 относительно конвейера 1.
Формула изобретения
Механизированный комплекс для выемки полезного ископаемого, включающий секции крепи, основания которых установлены с возможностью взаимодействия с направляющими лыжами изгибающегося конвейера, имеющего став, и связаны с конвейером двумя гидродомкратамй передвижки, отличающийся тем, что, с целью улучшения взаимодействия крепи и конвейера при сложной гипсометрии пласта, основание крепи выполнено с передним и-образным выступом, вершина которого направлена по направлению передвижки крепи, а ширина выступа больше ширины осное вания секции крепи, и двумя боковыми выступами, расположенными с возможностью их взаимодействия при развороте секции крепи с домкратами передвижки, которые закреплены на
Q конвейере ниже его става.
Источники информации, принятые во внимание при экспертизе
1.Братченко Б.Ф. и др. Комплексная механизация и автоматизация очистных работ в угольных шахтах. М., Недра, 1977, с. 179.
2.Братченко Б.Ф. и др. Комплексная механизация и автс 1атизация очистных работ в угольных шахтах.
Q М., Недра, 1977, с. 124 (прототип).