1
Известные бесконтактные позиционные электроприводы, содержащие бесконтактные электродвигатели постоянного тока, канал реверса и дифференцирующее пассивное корректирующее звено, имеют неудовлетворительные динамические показатели, поскольку применение пассивных дифференцирующих звеньев приводит к сильному ослаблению управляющего сигнала.
Цель изобретения - улучщение динамических свойств электропривода без ослабления сигнала рассогласования.
Это достигается тем, что дифференцирующее пассивное корректирующее звено включено в канал реверса.
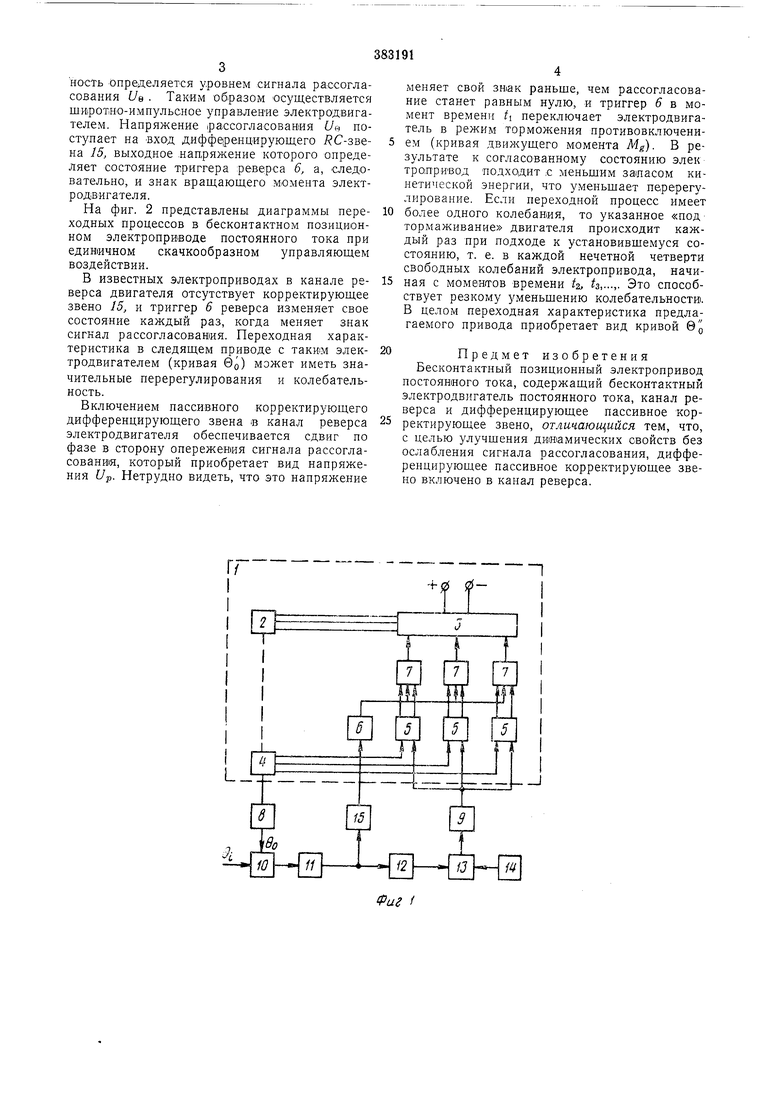
На фиг. 1 представлена функциональная схема предлагаемого электропривода; на фиг. 2 - диаграммы переходных процессов.
Бесконтактный электродвигатель / постоянного тока содержит синхронную мащину 2, секции якорной обмотки которой подключены к источнику постоянного тока посредством полупроводникового коммутатора 3, управляемого по сигналам датчика положения ротора 4 через триггеры-формирователи 5. Реверсирование электродвигателя обеспечивается при помощи триггера 6 и ключей реверса 7, образующих канал реверса. С валом электродвигателя связан редуктор 8. Дополнительно электропривод содержит транзисторный ключ
9, чувствительный элемент JO, фазочувствительный усилитель-выпрямитель 11, выпрямитель 12, сумматор 13, генератор 14 периодического сигнала и дифференцирующее корректирующее звено 15.
Принцип действия позиционного электропривода состоит в следующем.
Сигнал рассогласования выявляется чувствительным элементом 10, усиливается и преобразуется фазочувствительным усилителемвыпрямителем 11 в постояняое напрялчение рассогласования U.-, , которое поступает на выпрямитель 12 и дифференцирующее пассивное корректирующее звено 15. Выпрямитель
12 необходим потому, что транзисторный ключ 9, с помощью которого производится щиротно-импульсное управление двигателем, не реверсивный и его релейная статическая характеристика в общем случае характеризуется некоторыми вапряжения.ми срабатывания и отпускания.
Выходное напряжение выпрямителя 12 суммируется в сумматоре 13 на входе ключа 9 с периодическим напряжением, например пилообразной формы, вырабатываемым генератором 14. В результате .на выходе ключа 9, а, следовательно, и на секциях электродвигателя, появятся прямоугольные импульсы напряжения, период которых равен периоду пилообразного напряжения, а относительная длительиость определяется уровнем сигнала рассогласования Ue . Таким образом осуществляется широтно-импульсное управление электродвигателем. Напряжение (рассогласования U поступает на вход диффе ренцирующего / С-звена J5, выходное ,нан,ряжение которого определяет состояние триггера реверса 6, а, Следовательно, и знак вращающего момента электродвигателя.
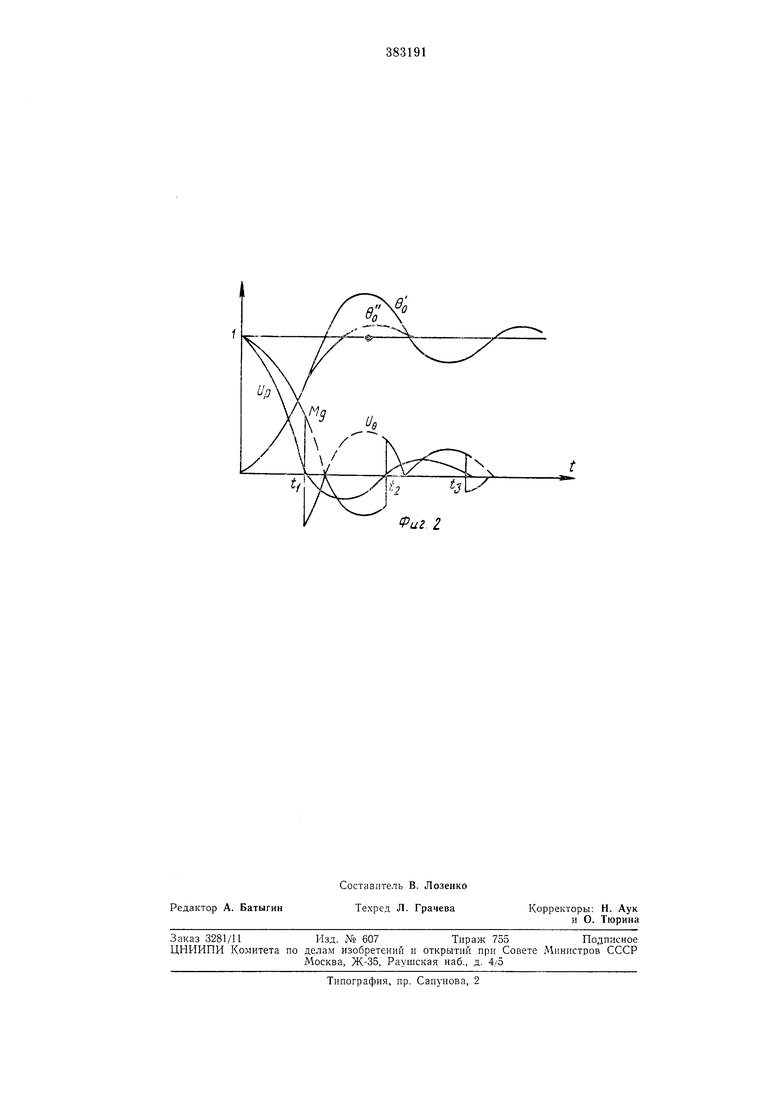
На фиг. 2 представлены диаграммы переходных процессов в бесконтактном позиционном электроприводе постоянного тока при единичном скачкообразном управляющем воздействии.
В известных электроприводах в канале реверса двигателя отсутствует корректирующее звено 15, и триггер 6 реверса изменяет свое состояние каждый раз, когда меняет знак сигнал рассогласования. Переходная характеристика в следящем приводе с таким электродвигателем (кривая во) может иметь значительные перерегулирования и колебательность.
Включением пассивного корректирующего дифференцирующего звена в канал реверса электродвигателя обеспечивается сдвиг по фазе в сторону опережения сигнала рассогласования, который приобретает вид напряжения Up. Нетрудно видеть, что это напряжение
меняет свой звак раньше, чем рассогласование станет равным нулю, и триггер 6 в момент времени ti переключает электродвигатель в режим торможения противовключением (кривая движущего момента Mg). В результате к согласованному состоянию элек тропривод подходит ;С меньшим за1пасом кинетической энергии, что уменьшает перерегулирование. Если переходной процесс имеет
более одного колебания, то указанное «под тормаживание двигателя происходит каждый раз при подходе к установившемуся состоянию, т. е. в каждой нечетной четверти свободных колебаний электропривода, начиная с моментов времени а. ta,-.-,- Это способствует резкому уменьшению колебательности. В целом переходная характеристика предлагаемого привода приобретает вид кривой 6
Предмет изобретения
Бесконтактный позиционный электропривод постоянного тока, содержащий бесконтактный электродвигатель постоянного тока, канал реверса и дифференцирующее пассивное корректирующее звено, отличающийся тем, что, с целью улучшения динамических свойств без ослабления сигнала рассогласования, дифференцирующее пассивное корректирующее звено включено в канал реверса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Следящая система | 1975 |
|
SU545969A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |
| Многопозиционный электропривод постоянного тока | 1987 |
|
SU1432708A1 |
| Задающее устройство | 1978 |
|
SU764078A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Стабилизированный электропривод | 1985 |
|
SU1302411A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| Следящая система | 1986 |
|
SU1472871A1 |
| Синхронизированный вентильный электродвигатель | 1984 |
|
SU1251279A1 |
гг
1
Фиг Z
