фазные входы блока коррекции частоты, входы первого блока нуль-органов образуют дополнительные фазные входы блока коррекции частоты, выходы апериодического звена формирователя корректирующего сигнала подключены к второго входу суммирующего звена, выход которого образует выход блока коррекции частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Частотно-регулируемый асинхронный электропривод | 1983 |
|
SU1119155A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| Частотно-регулируемый асинхронный электропривод для испытательного стенда двигателей | 1984 |
|
SU1203682A1 |
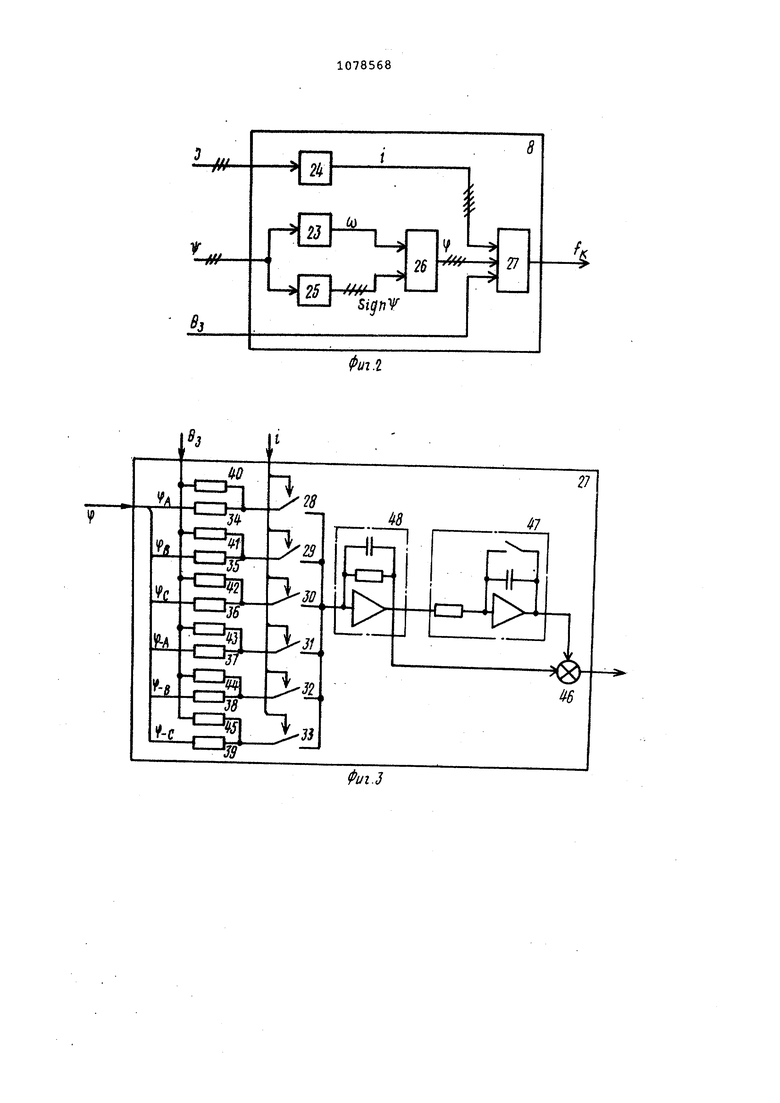
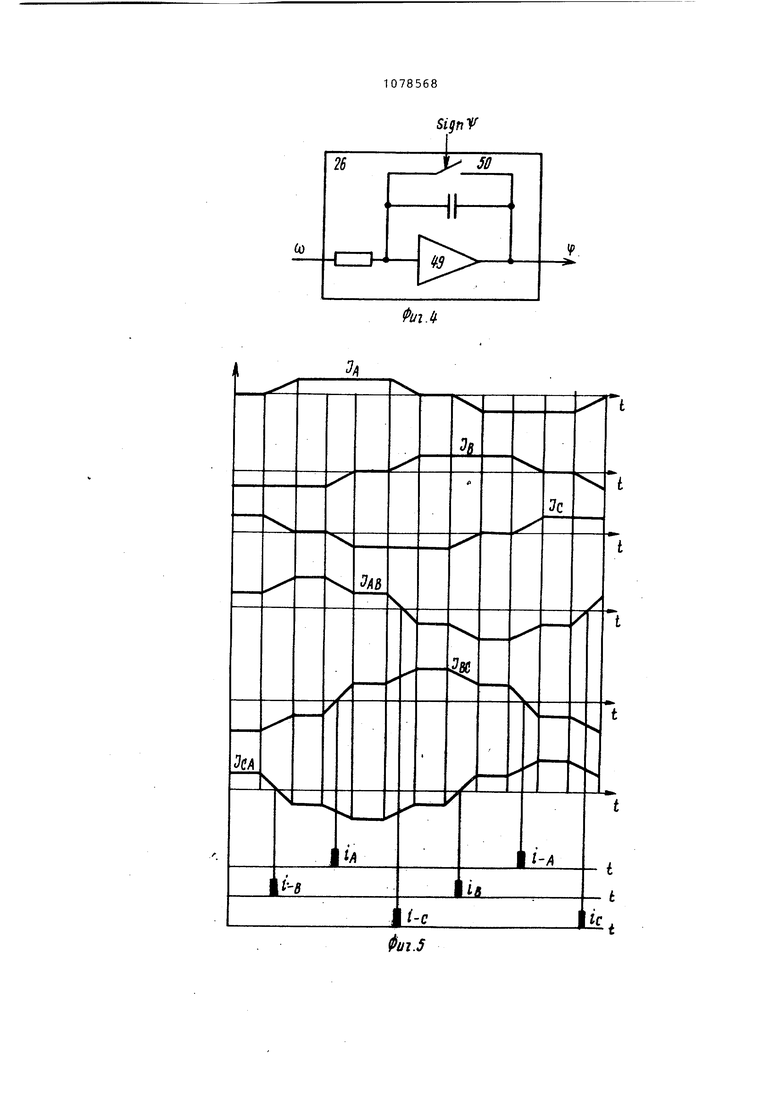
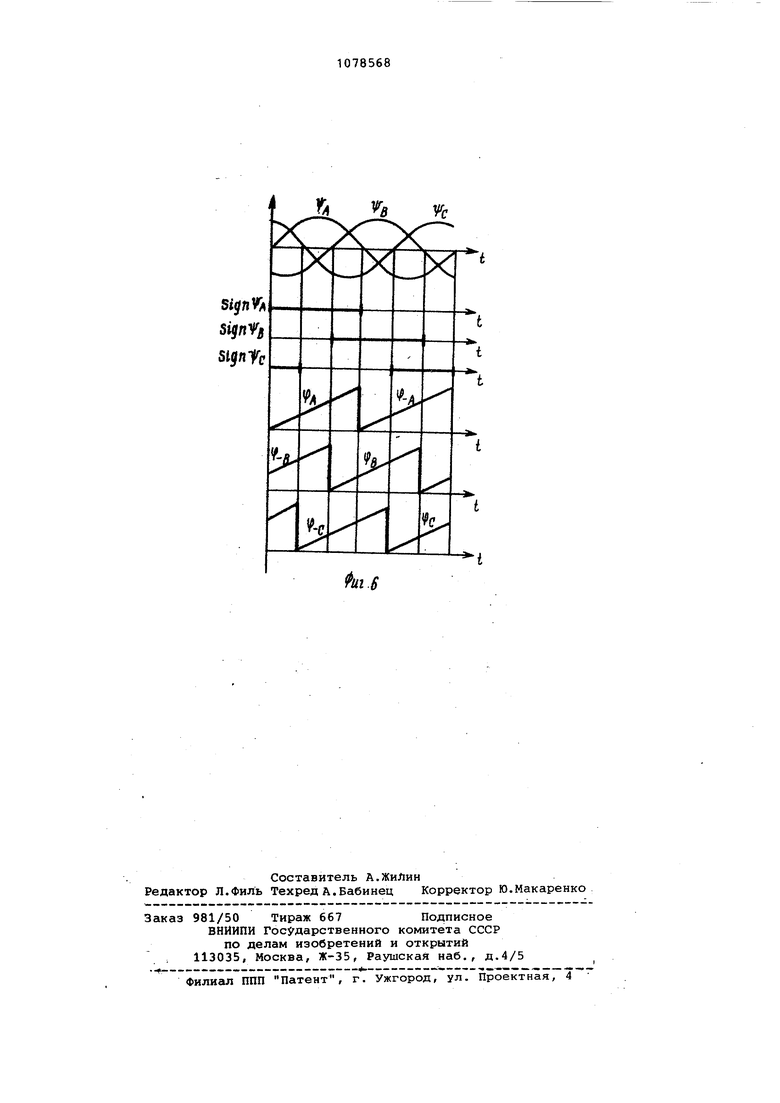
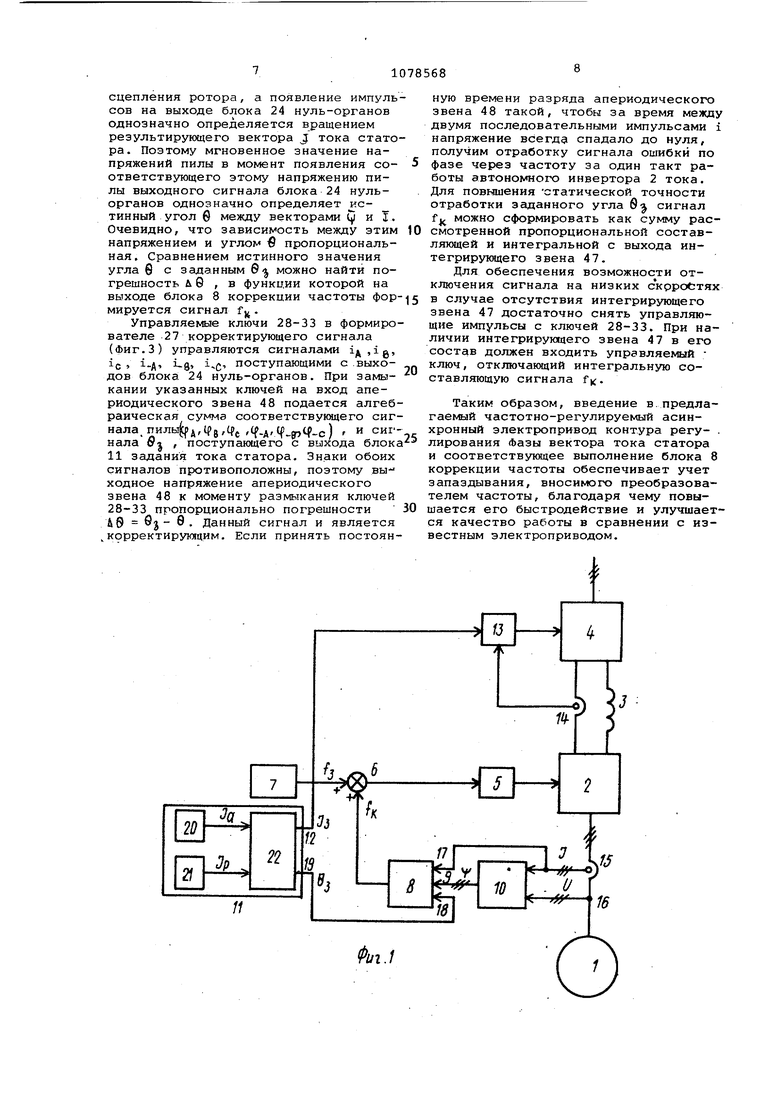
Изобретение относится к электротехнике, в частности, к частотнорегулируемым, электроприводам, постро енным на основе асинхронного двигате ля с KOpbTKO3aivjKHyTHM ротором и преобразователя частоты с автономным ин вертором тока, и может быть использо вано в системах и механизмах общепромышленного назначения, где определяющим является высокое качество работы в переходных режимах. Известен частотно-регулируемый асинхронный электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к преобразова телю частоты, составленному из автономного инвертора тока, дросселя и управляемого выпрямителя, блок управления инвертором, подклк1ченный выхо дами к входам управления автономного инвертора тока, задатчики активной и реактивной составляющих тока статора, выходы которых подключены к формирователю управлякщих напряжений, регулятор тока, выходом подключенный к входу управления управляемого выпрямителя, блок компараторов, выходы которого подключены к входам блока управления инвертором, и блок определения фазных потокосцеплений, соединенный входами с датчиками фазных токов и напряжений статора, а выходом - с дополнительным входом формирователя управляющих напряжений и с первым входом блока компараторов при этом выходы формирователя управляющих напряжений подключены соответ ственно к входам регулятора тока и второму входу блока компараторов l| Недостатком данного электропривода является низкое качество работы в переходных режимах, так как в нем не обеспечивается компенсация запаздывания по фазе вектора входнозго то ка инвертора по сравнению с задагадим вектором тока. Наиболее близким к предлагаемому по технической сущности ялвяется частотно-регулируемый асинхронный электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты, составленному из автономного инвертора тока, дросселя и управляемого выпрямителя, блок управления инвертором, подключенный выходами к входам управления автономного инвертора тока, а входом - к выходу сумматора, первый вход которого соединен с выходом датчика скорости враща ния, второй вход - с выходом регулятора скорости, а третий вход - с выходом блока коррекции частоты, подключенного фазными входами к выходам блока определения фазных потокосцеплений, к входам которого подключены выходы датчиков фазных напряжений и токов статора, регулятор тока, первый вход которого подключен к выходу функционального преобразователя, соединенного входом с выходом регулятора скорости, второй вход регулятора тока подключен к выходу датчика тока, установленного на выходе управляемого выпрямителя, а выход регулятора тока подключен к входу управления управляемого выпрямителя 21 . Недостатком известного электропривода является низкое качество работы в переходных режимах, в частности невысокое быстродействие, из-за отсутствия корректирующей связи по фазе вектора тока статора. Цель изобретения - повышение качества работы частотно-регулируемого асинхронного электропривода путем увеличения быстродействия. Указанная цель достигается тем, что в частотно-регулируемом асинхронном электроприводе, содержащем асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты, составленному из последовательно соединенных автономного инвертора тока, дросселя и управляемого выпрямителя, блок управления инвертором, подключенный выходами к входам управления автономного инвертора тока, а входом - к выходу сумматора, первый вход которого соединен с выходом блока задания частоты, а второй вход с выходом блока коррекции частоты, подключенного основными фазными входами к выходам блока определения фазных потокосцеплений,блок задания .тока статора с выходом задания модуля, тока статора, подключенным к первому входу регулятора тока, второй вход которого соединен с выходом датчика тока, установленного на выходе -управляемого выпрямителя, а выход - с входом управления управляемого выпрямителя, и датчики фазных токов и напряжений статора,подключенные выходами к входам блока определения фазных потокосцеплений, блок коррекции частоты снабжен дополнительными фазными входами и входом задания фазы тока статора, а блок задания тока статора снабжен выходом задания фазы вектора тока статора, подключенным к входу задания фазы вектора тока статора блока коррекции частоты, дополнительные фазные входы которого подключены к выходам датчиков фазных токов статора, при этом блок коррек ции частоты содержит определитель ч стоты вращения вектора потокосцепления, два блока нуль-органов, блок генераторов пилообразных напряжений и формирователь корректируквдего сиг нала, составленный из шести управля &иаах ключей, двенадцати токоограничивающих резисторов и последователь но соединенных суммирующего,интегри рующего и апериодического звеньев, причем к входу апериодического звена подключены объединенные между со бой выходы управляемых ключей, подключенные входами к первым шести то коограничиваквдим резисторам, вторые выводы которых образуют первую груп пу входов формирователя корректирую щего сигнала, подключенных к выхода блока генераторов пилообразных напр жений, входы управления управляемых ключей образуют вторую группу входо формирователя корректирующего сигна ла, подключенных к выходам первого блока нуль-органов, входы управляемых ключей подключены дополнительно другим шести токоограничивающим резисторам, вторые выводы которых объе динены между собой и образуют вход задания фазы вектора тока статора блока коррекции частоты, один вход блока генераторов пилообразных напря жений подключен к выходу определителя частоты вращений вектора потоко.сцепления, а другие входы - к выходам второго блока нуль-органов, входы которого пофазно объединены с вхо дами определителя частоты вращения . вектора потокосцепления и образуют основные фазные входы блока коррекции частоты, входы первого блока нуль-органов образуют дополнительные фазные входы блока коррекции частоты выход апериодического звена формирователя корректирующего сигнала подключен к второму входу суммирующего звена, выход которого образует выход блока коррекции частоты. На фиг.1 представлена структурная схема частотно-регулируемого асинхронного электропривода; на фиг.2 структурная схема блока коррекции частоты, на фиг.З - схема генераторов пилообразного напряжения; на фиг.4 - схема формирователя корректирующего сигнала, на фиг.5 - диаграмма работы первого блока нуль-органов J на фиг.6 - диаграммы работы второго блока нуль-органов и блока генераторов пилообразных напряжений. Частотно-регулируемый асинхронный электропривод содержит асинхронный двигатель 1 с короткозамкнутым рбтором (фиг.1), статорные обмотки которого подключены к преобразователю ча стоты, составленному из последовательно соединенных авто- омного инвертора 2 тока, дросселя 3 и управляе- , мого выпрямителя4, блок 5 управления инвертором, подключенный выходами к входам управления автономного инвертора 2 тока, а входом - к выходу сумматора 6, первый вход которого соединен с выходом блока 7 задания частоты, а второй вход - с выходом блока 8 коррекции ч-астоты, подключенного основными фазными входами 9 к выходам блока 10 определения фазных потокосцеплений, блок 11 задания тока статора с выходом 12 задания модуля тока статора, подключенным к первому входу регулятора 13 тока, второй вход которого соединен с выходом датчика 14 тока, установленного на выходе управляемого вьшрямителя, а выход с входом управления управляемого выпрямителя 4, и датчики фазных токов 15 и напряжений 16, подключенные выходами к входам блока 10 определения фазных потокосцеплений. В частотно-регулируемом асинхронном электроприводе блок коррекции частоты снабжен дополнительными фазными входами 17 и входом 18 задания фазы вектора тока статора, а блок 11 задания тока статора снабжен выходом 19 задания фазы вектора тока статора, подключенным к входу 18 задания фазы вектора тока статора блока 8 коррекции частоты, дополнительные фазные входы 17 которого подключены к выхоам датчиков 15 фазных токов статора. Блок 11 Зсшания тока статора содерит задатчики активной и реактивной составляющих тока 20 и 21 статора оответственно и формирователь 22 одуля и фазы тока статора. Блок 8 коррекции частоты содержит пределитель 23 частоты вргицения векора потокосцепления (фиг.2), блоки 24 и 25 нуль-органов, блок 26 генераоров пилообразных напряжений и форирователь 27 корректирующего сигнаа . Формирователь 27 корректирующего игнсша составлен из шести управляемых ключей 28-33, двенадцати токоограничиваквдих резисторов 34-45 и последовательно соединенных суммиругацего эвена 46, интегрирующего звена 47и апериодического звена 48. К вхо ду апериодического звена 48 подключеньа объединенные между собой выходы управляемых ключей 28-33, подключенные входами к первым шести токоограничивающим резисторам 34-39, вторые выводы которых образуют первую группу входов формирователя 27 корректирующего сигнала, подключенных к выхо дам блока 26 генераторов пилообразных нап15яжений, Входы управления управляемых кл{очей 28-33 образуют вторую группу входов формирователя 27 корректирующего сигнала, подключенных к выходам первого блока 24 нульорганов. Входы управляемых ключей подключены также к другим шести токоограничивагацим резисторам 40-45, вторые выводы которых объединены меж ду собой и образуют вход 18 задания фазы вектора тока статора блока 8 коррекции частоты. Первый из входов блока 26 генераторов пилообразных напряжений подключен к выходу определителя 23 частоты вращения вектора потокосцепления, а другие входы - к выходам второго блока 25 нуль-органов, входы ко орого пофазно объединены с входами определителя, 23 частоты вращения вектора потокосцепления и образуют основные фазные входы 9 блока В коррекции частоты. .Входы первого блока 24 нуль-органов образуют дополнитель ные фазные входы 17 блока 8 коррекци частоты. Выход апериодического звена 48формирователя 27 корректирующего сигнала подключен к второму входу суммирующего звена 46, выход которого образует выход блока 8 коррекции частоты. Блок 26 генераторов пилообразныхнапряжений содержит шесть однотипных генераторов, каждый из которых содер жит интегратор 49 (фиг.4) и управляе мый ключ 50. Частотно-регулируе влй асинхронный электропривод работает следующим образом. Зaдaтчи и активной и реактивной составляющих тока 20 и 21 статора формируют сигналы задания Ig , Ipсоответственно в декартовой системе координат, связанной с вектором пото косцепления ротора. В формирователе 22 модуля и фазы тока статора указан ные сигналы задания преобразуются в полярной системе координат, при этом получают сигнал li задания модуля тока статора и сигнал 8 задания фазы вектора тока статора относительно вектора, потокосцепления ротора. Сигнал 1ч, задания модуля тока статора отрабатывается в замкнутой системе , автоматического регулирования с помсядью регулятора 13 тока. Управляющие импульсы на тиристоры автономного инвертора 2 тока формируются на выходах блока 5 управления инвертором, при этом частота управляющих импульсов пропорциональна величине сигнала на выходе сумматора 6, который получается путем суммирования сигнала задания частоты f , поступающего с выхода блока 7 задания частоты, и корректирующего сигнала f|, поступакядего с выхода блока 8 коррекции частоты. На вход блока 8 корреции.частоты поступают фазные сигналы О с выхода датчиков 15 фазных токов статора, фазные сигналы у с выхода блока 10 определения фазных потокосцеплений и сигнал 9 задания фазы тока статора с выхода блока 11 задания тока статора. Сигналы f фазных потокосцеплений формируются по выходным сигналам датчиков фазных токов и напряжений 15 и 16 статора соответственно. В нормальных режимах работы (причаетотах выше некоторого минимальнолго порога) ,с помощью сигнала f).. обеспечивается воспроизведение заданогр угла б независимо.от запаздывания, вносимого автономным инвертором 2 тока, а при пуске, реверсе и в режиме низкой скорости сигнал f, отключается (выходной сигнал блока 8 делается равным нулю.) и управление частотой осуществляется только в функции сигнала f , не связанного с изменением и преобразованием сигналов потокосцепления. Блок 24 нуль-органов в блоке & коррекции частоты вырабатывает узкие единичные импульсы в моменты перехода линейных токов через нуль (фиг.5). Блок 25 нуль-органов вырабатывает узкие единичные импульсы в моменты времени, соответствующие положительной полярности (Разных потокосцеплений цд , Cfj-, ц-с ,v.A, ,у-с(Фиг.б). На вход блока 26 генераторов пцлообразных напряжений, выполненного на основе интеграторов 49 (фиг.4), поступает сигнал Со с выхода определителя 23 частоты вращения вектора потокосцепления и сигналы, j с выходов блока 25 нуль-органов. Диаграммы фиг.6 поясняют работу блока 25 нульорганов и блока генераторов пилообразных напряжений. Комбинируя логические сигналы tf , можно обеспечить длительность развертки пилообразных сигналов не 180, а 240 или 300 эл.град Действие формирователя 27 корректирующего сигнала основывается на том, что развертка генераторов в блоке 26 генераторов пилообразных напря жений однозначно определяется вращением результиругацего вектора Ьотокс
сцепления ротора, а появление импульсов на выходе блока 24 нуль-органов однозначно определяется вращением результирующего вектора J тока статора. Поэтому мгновенное значение напряжений пилы в момент появления соответствующего этому напряжению пилы выходного сигнала блока 24 нульорганов однозначно определяет ис- тинный угол б между векторами Q и I. Очевидно, что зависимость между этим напряжением и углом в пропорциональная. Сравнением истинного значения угла 8 с заданным S-j можно найти погрешность Л 0 , в функции которой на выходе блока 8 коррекции частоты формируется сигнал f j.
Управляемые ключи 28-33 в формирователе 27 корректирующего сигнала (фиг.З) управляются сигналами i,ig, ic , 1.д, Lg, поступающими с .выходов блока 24 нуль-органов. При замыкании указанных ключей на вход апериодического звена 48 подается алгебраическая сумма соответствукицего скгнала.,1р8,Че ,(f.A,(,) нала 6г , поступающего с выхода блока 11 задания тока статора. Знаки обоих
сигналов противоположны, поэтому ВЫ
ходное напряжение апериодического звена 48 к моменту размыкания ключей 28-33 пропорционально погрешности 49 0J- 9. Данный сигнал и является корректирующим. Если принять постоянную времени разряда апериодического звена 48 такой, чтобы за время между двумя последовательными импульсами i напряжение всегда спадало до нуля, получим отработку сигнала ошибки по фазе через частоту за один такт работы автономного инвертора 2 тока. Для повышения -статической точности отработки заданного угла 0 сигнал fj можно сформировать как сумму рассмотренной пропорциональной составляющей и интегральной с выхода интегрирующего звена 47.
Для обеспечения возможности отключения сигнала на низких скрроСтях в случае отсутствия интегрирующего звена 47 достаточно снять управляющие импульсы с ключей 28-33. При наличии интегрирующего звена 47 в его состав должен входить управляемый ключ, отключающий интегральную составляющую сигнала f,
Таким образом, введение в. предлагаемый частотно-регулируемый асинхронный электропривод контура регулирования Фазы вектора тока статора и соответствующее выполнение блока 8 коррекции частоты обеспечивает учет запаздывания, вносимого преобразователем частоты, благодаря чему повышается его быстродействие и улучшается качество работы в сравнении с известным электроприводом.
//
SigrtV
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для частотного управления асинхронным двигателем | 1978 |
|
SU744887A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
