удадяювде|Му1СЯ -и Приближающемуся О(бъвкТу €OOTlBiefrCfriB€IHiBO.
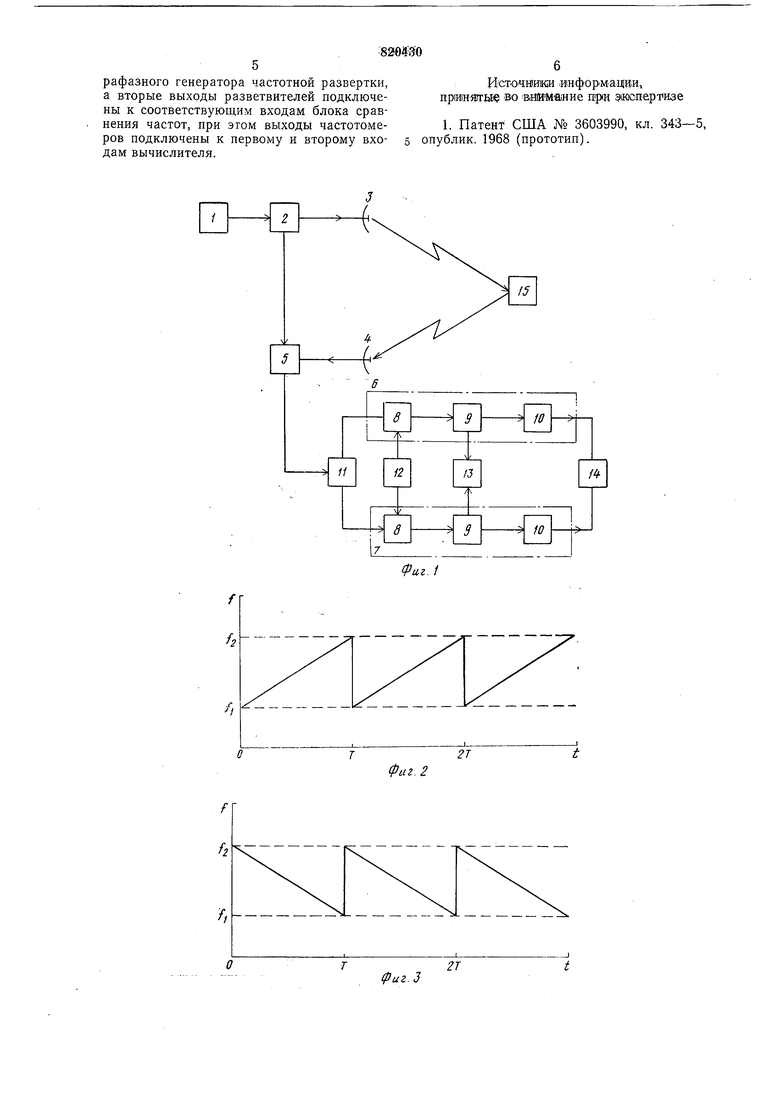
Устройство для определения дальности и скорости объекта содержит задающий генератор 1, первый направленный ответвитель 2, передающую и приемную антенны 3 и 4, сумматор 5, два канала 6 и 7 спектральной обработки сигнала, каждый из которых состоит из анализатора 8 спектра, разветвителл 9-(И .orroMepia 10, Втарюй н-апраелевн-ый 10Ппввт1В1Итель 11, параф.азный генератор 12 частотной разве|рт,к1и, блок 13 qp BiHeния частот и вычислитель 14.
Устройство работает следующим образом.
От аад/ающепо генератора 1 стационарный сигнал, г.олоса частот которого превыщает отношение скорости света к дальности объекта 15, излучается передающей антенной 3 в сторону объекта 15, отражается от него и поступает иа вход приемной антенны 4. Часть излучаемого сигнала определяется при помощи первого направленного ответвителя 2 и суммируется с принятым сигналом в сумматоре 5.
Результирующий суммарный сигнал разделяется с помощью второго направленного ответвителя 11 на два канала 6 и 7 спектральной 1аб1ра бо1тк1н сигнала. В (кана-ле 6 анализ суммарного сигнала производится анализатором 8 спектра со скоростью частот -/1
ной развертки, равной Vi
где f 1- нижняя частота в спектре излучаемого сигнала;
/2- верхняя частота в спектре излучаемого сигнала; Т - период частотной развертки.
Частотная развертка анализаторов 8 спектра каналов 6 и 7 спектральной обработки сигнала производится от парафазного генератора 12.
В первом канале 6 спектральной обработки сигнала сигнал с выхода анализатора 8 спектра поступает через разветвитель 9 на вход частотомера 10, который измеряет частоту биений FI этого юишала. Аналогично во втором канале 7 спектральной обработки сигнала сигнал с выхода анализатора спектра 8 через разветвитель 9 поступает на вход частотомера 10, который измеряет чаотоггу биеиий Р даннопо сипнала. На первый и второй входы вычислителя 14 поступают данные о частотах FI -и F-2 от частотомеров 10 аоОтв1е1тстБбнио -neipBoro 1и «торопо {Каналов ссюктральной обработки сигнала 6 и 7.
Вычислитель 14, используя введенные в него данные о частотах FI и Fs, определяe T щ/алынюсть L О|бъак та 15 и радиальную составляющую скорости объекта V по сле.дующему алгоритму:
L( + f.);
Г (Fl-P2),
где С - скорость света;
К - средняя длина .волны излучаемого сигнала;
V vi-модуль скорости частотной развертки анализаторов спектра 8. Определение направления движения
объекта 15 производится блоком сравнения частот 13, на первый вход которого через разветвитель 9 первого капала 6 спектральной обработки сигнала поступает сигнал с выхода соответствующего анализатора
8 сп)ек1Т1р1а, а на второй вход через piasBeo-Binтель 9 второго канала 7 спектральной обработки сигнала поступает сигнал с выхода соответствующего анализатора спектра 8. Превышение частоты биений FI над частотой биений F соответствует удалению объекта 15 (см. фиг. 4 )и, напротив, понижение частоты соответствует приближению объекта 15 (см. фиг. 5), а равенство частот соответствует тому, что координаты объекта 15 остаются .неизменными.
Таким образом, использование предложенного устройства дает возможность устранить неопределенность, свойственную изBOQTiHbiM 1р1адиолю1катор01м со спвк1тральной
бработкой сигнала, при измерении дальности до объекта и радиальной составляющей скорости объекта, что повышает точность одновременного измерения дальности о объекта и радиальной составляющей
скорости объекта и расширяет функциональные возможности применения аналогичных устройств.
Фор.мул а «зо бр.ет ени я
Устройство для определения дальности и скорости объекта, содержащее йоследовательно соединенные задающий генератор, первый направленный ответ.витель и передающую антенну, а также последовательно соединенные приемную антенну -и сумматор, второй вход которого соединен с вторым выходом первого направленного ответвителя, отличающееся тем, Ч1то, с целъю повыш€Н1И1я точности аднавремениого iHSMespeниЯ дашьнаспи до объекта и .альной составляющей -окюрасти О1бъекта, IB него Вгведены два канала спектральной обработки сигнала, каждый из которых состоит соответственно из последовательно соединенных анализатора спектра, разветвителя и частотомера, а также второй направленный ответвитель, парафазный генератор частотной развертки, блок сравнения частот и вычислитель, при этом выход сумматора через второй направленный ответвитель подключен к входам анализаторов спектра соответствующих каналов спектральной обработки сигнала, вторые входы которых соединены с соответствующими выходами парафазного генератора частотной развертки, а вторые выходы разветвителей подключены к соответствующим входам блока сравнения частот, при этом выходы частотомеров подключены к первому и второму входам вычислителя. ИСточн1И1ки инфорМаций, пр1иияггЫ1е во BiHMMfliHHe при эмспертизе 1. Патент- США N° 3603990, кл. 343-5, опублик. 1968 (прототип), 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения дальности со спектральной обработкой сигнала | 1988 |
|
SU1806384A3 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛИ В РЛС С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2018 |
|
RU2699240C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ НЕПОДВИЖНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ШУМОВОГО СИГНАЛА И ШУМОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2024 |
|
RU2831136C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2076336C1 |
| Интерферометрический гомодинный радиолокатор | 2018 |
|
RU2689397C1 |
| КОРАБЕЛЬНАЯ ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2173865C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2141119C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ РЛС С ПЕРИОДИЧЕСКОЙ ЧМ МОДУЛЯЦИЕЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2347235C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ, РАДИАЛЬНОЙ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ В РЛС С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2022 |
|
RU2799812C1 |
