Предлагаемое изобретение относится к радиолокационной измерительной технике и может быть использовано в РЛС с непрерывным периодическим излучением с произвольной треугольной частотной модуляцией (ЧМ), измеряющей положение целей в координатах дальность - частота, а также в РЛС картографирования типа РСА.
Известны радиолокационные устройства измерения дальности, использующие непрерывный линейно частотно-модулированный сигнал (ЛЧМ) в качестве зондирующего, в которых информация о измеряемой дальности R извлекается из разности частот Δf зондирующего сигнала и сигнала, отраженного целью [1, стр.289]. При работе по одной ветви модулирующего сигнала оценка дальности от РЛС до цели R вычисляется по формуле:
R=сΔf/2Клчм,
где Клчм=Δfдев/Ти - крутизна перестройки частоты зондирующего сигнала на измерительном интервале Ти модулирующей функции,
с - скорость света,
Δfдев - девиация частоты зондирующего сигнала на измерительном интервале.
Поскольку относительная погрешность измерения определяется в том числе и относительной погрешностью крутизны Клчм, очевидно, что нелинейность модуляции частоты γ зондирующего сигнала должна соответствовать разрешению РЛС по дальности δR:
γ<1+δR/Rmax,
где Rmax - максимальная измеряемая РЛС дальность.
Известен способ формирования периодического ЛЧМ сигнала в РЛС измерения расстояния [2]. Согласно способу ЛЧМ зондирующий сигнал формируется генератором, частота которого управляется напряжением. Текущая несущая частота зондирующего сигнала с помощью гетеродина с эталонной частотой переносится на промежуточную, делится на целое число, далее измеряется и сравнивается с текущим расчетным значением. По сигналу ошибки процессор корректирует цифровую последовательность, преобразуемую в аналоговое напряжение, управляющее частотой генератора.
Недостатком способа является невозможность воспроизведения закона модуляции зондирующих сигналов разных периодов повторения с точностью до фазы, соответственно невозможность проведения межпериодной когерентной обработки сигнала.
Известен способ формирования ЛЧМ сигнала [3], в котором частоту выходного ЛЧМ сигнала получают путем умножения частоты первичного ЛЧМ сигнала с меньшей девиацией в целое число раз. Первичный ЛЧМ сигнал формируют с помощью генератора, управляемого напряжением. Для контроля закона модуляции текущей частоты первичного сигнала ее делят в целое число раз, измеряют, сравнивают с текущей расчетной, вырабатывают сигнал ошибки и корректируют оцифрованную расчетную последовательность, управляющую через цифро-аналоговое преобразование частотой генератора первичного сигнала.
Недостатком способа является некогерентность зондирующих сигналов разных периодов. Обратная связь по частоте не обеспечивает повторение закона модуляции частоты первичного сигнала с точностью до фазы, соответственно не позволяет проводить межпериодную когерентную обработку сигнала, уточнить доплеровский сдвиг и дальность до цели.
В способе формирования периодического ЧМ зондирующего сигнала с симметричной треугольной модуляцией, описанном в [4] и примененном в РЛС, измеряющей дальность и скорость сближения с целью, частота выходного генератора управляется периодическим модулирующим напряжением, которое рассчитывают, вводят в память, считывают в расчетные моменты времени, преобразуют в аналоговое и фильтруют в фильтре низкой частоты. Нелинейность модуляционной характеристики выходного генератора компенсируется расчетом формы модулирующего напряжения. Особенностью способа является то, что для уменьшения амплитуды пульсаций модулирующего аналогового напряжения, полученного из оцифрованных значений, соответственно паразитных составляющих спектра разностной частоты зондирующего и отраженного сигналов, считывание памяти производят в расчетные моменты времени, не эквидистантно отстоящие друг от друга.
Недостатком способа является неучет возможных уходов модуляционной характеристики выходного генератора, связанных со старением, изменением температуры, напряжения питания. Режим межпериодной когерентной обработки сигнала здесь так же не возможен.
В способе формирования периодического ЧМ сигнала с симметричной треугольной модуляцией [5], взятом в качестве прототипа, формирование напряжения модуляции несущей частоты выходного генератора производится путем генерирования цифровых отсчетов в фиксированные моменты времени, преобразования их в дискретные аналоговые отсчеты и низкочастотной фильтрации, при этом формирование цифровых отсчетов модулирующего напряжения производится рекурсивно как сумма текущего напряжения предыдущего периода и корректирующего. Для расчета текущего корректирующего напряжения как функции относительного отклонения мгновенного периода разностной частоты от среднего измеряют мгновенный и средний период разностной частоты.
Недостатком способа является то, что ЧМ сигналы разных периодов не являются когерентными и не могут быть использованы при когерентном межпериодном накоплении. Кроме того, обеспечение высокой линейности частотной модуляции для снижения погрешности измерения дальности достаточно сложно, связано с необходимостью получения опорного сигнала, задержанного относительно зондирующего, по работе с которым рассчитывается корректирующее напряжение. Для РЛС, работающей с многоцелевым отраженным сигналом, в том числе по протяженной цели, для создания опорного сигнала необходимы устройство задержки зондирующего сигнала, отдельный смеситель для получения разностной частоты между опорным и зондирующим сигналами, устройства измерения текущего мгновенного и среднего периодов разностной частоты. Относительная погрешность измерения порядка 0,1%, достигнутая этим способом, недостаточна при измерениях больших расстояний с высоким разрешением и точностью.
Целью предлагаемого изобретения является повышение точности измерения в РЛС с периодическим частотно-модулированным сигналом с произвольной треугольной модуляцией за счет обеспечения высокой линейности изменения несущей частоты во времени с обеспечением возможности межпериодного когерентного накопления.
Поставленная цель достигается тем, что способ формирования зондирующего периодического ЧМ сигнала для РЛС, измеряющей положение целей в координатах дальность - частота, включающий генерирование цифровых отсчетов в фиксированные моменты времени, преобразование их в дискретные аналоговые отсчеты и низкочастотную фильтрацию дискретных аналоговых отсчетов, формирование выходного частотно-модулированного зондирующего сигнала, прием отраженного сигнала, смешение его с частью мощности зондирующего, выделение сигнала разностной частоты на измерительном интервале, являющемся частью периода модуляции, отличается тем, что последовательность операций генерирования цифровых отсчетов в фиксированные моменты времени, преобразования их в дискретные аналоговые отсчеты и низкочастотной фильтрации обеспечивает получение аналоговых квадратурных (синусных и косинусных) частотно-модулированных на видеочастоте сигналов с треугольной частотной модуляцией с требуемым периодом модуляции и с девиацией Δωв m раз меньшей требуемой девиации зондирующего сигнала Δωз, где m - целое число, формирование частотно-модулированного зондирующего сигнала включает перенос квадратурного частотно-модулированного на видеочастоте сигнала на более высокую несущую с помощью квадратурного балансного смесителя, умножение частоты полученного сигнала в m раз, усиление сигнала до требуемой мощности в заданной Δωз полосе частот.
Для обеспечения точной настройки несущей частоты зондирующего сигнала и повышения мощности сигнала, поступающего на умножитель частоты в m раз, выполняют дополнительный сдвиг несущей частоты умножаемого сигнала с помощью смесителя сдвига на ФАПЧ.
Согласно предлагаемому способу формируется последовательность квадратурных (синусных и косинусных) цифровых отсчетов периодического видеочастотного ЧМ сигнала с треугольной модуляцией, которая в фиксированные моменты времени преобразуется в дискретные квадратурные аналоговые отсчеты и фильтруется низкочастотным фильтром. Период модуляции частоты квадратурных сигналов Uc(ωв,t) и Us(ωв,t) соответствует требуемому периоду модуляции зондирующего сигнала ТМ. Частота квадратурных сигналов описывается выражением:

где k1 и k2 - крутизны ЧМ модуляции сигнала на разных сторонах треугольника,
n - номер периода закона модуляции зондирующего сигнала,
-k1T1=k2(TM-T1).
При этом девиация частоты сформированного квадратурного видеосигнала Δω в выбирается в m раз меньше требуемой девиации зондирующего сигнала Δωз, где m - целое число.
Из квадратурных аналоговых напряжений Uc(ωв,t) и Us(ωв,t) и напряжения с частотой сдвига Uo(t)=cos(ωоt+ϕо), поступающих в квадратурный балансный смеситель, формируется первичный ЧМ сигнал на частоте ωкбс(t)=(ωо+ωв(t)
Uкбс(t)=cos[ωкбс(t)t+ϕо],
который дополнительно смещается по частоте в смесителе сдвига на ФАПЧ с целью как повышения спектральной чистоты сигнала, его мощности, так и обеспечения возможности регулировки выходной несущей частоты зондирующего сигнала. Сигнал после смесителя сдвига описывается выражением:
Uсдв(t)=cos[(ωсдв+ωкбс(t))t+ϕо+ϕсдв].
Далее путем умножения частоты в m раз и усиления мощности получают зондирующий на частоте ωн=m(ωо+ωсдв+ωв(t)) с девиацией Δωдев=2π Δfдев=mΔωв.
Сущность изобретения поясняется дальнейшим описанием и чертежами РЛС, реализующими данный способ:
Фиг.1 - структурная схема РЛС.
На фиг.1 приняты следующие обозначения:
1 - Формирователь квадратурного видеочастотного ЧМ сигнала (ФКВЧМ),
2 - Квадратурный балансный смеситель (КБС),
3 - Первый полосовой фильтр (ПФ1),
4 - Смеситель сдвига (СмСД),
5 - Синтезатор частот (СЧ),
6 - Умножитель частоты (Уч),
7 - Усилитель мощности (Ум),
8 - Второй полосовой фильтр (ПФ2),
9 - Вычислитель (ВУ),
10 - Усилитель низкой частоты (УНЧ),
11 - Смеситель (См),
12 - Направленный ответвитель (НО),
13 - Аналого-цифровой преобразователь (АЦП),
14 - Вторая (приемная) антенна (А2).
15 - Первая (передающая) антенна (А1),
Прототипом РЛС, изображенной на фиг.1, реализующей способ формирования когерентного периодического ЧМ сигнала, является РЛС [3, фиг.14], содержащая последовательно соединенные направленный ответвитель 12, смеситель 11, усилитель низкой частоты 10, аналого-цифровой преобразователь 13, первую (передающую) антенну 15, вход которой соединен с первым выходом направленного ответвителя 12, вторую (приемную) антенну 14, выход которой соединен с вторым входом смесителя 11, отличающаяся тем, что в нее введены последовательно соединенные синтезатор частоты 5, смеситель сдвига 4, умножитель частоты 6, усилитель мощности 7, второй полосовой фильтр 8, выход которого подключен к входу направленного ответвителя 12, последовательно соединенные квадратурный балансный смеситель 2 и первый полосовой фильтр 3, выход которого подключен к второму входу смесителя сдвига 4, формирователь квадратурного видеочастотного ЧМ сигнала 1, первый и второй выходы которого подключены к одноименным входам квадратурного балансного смесителя 2, вычислитель 9, второй выход которого соединен с вторым входом формирователя квадратурного видеочастотного ЧМ сигнала 1, первый, второй и четвертый выходы синтезатора частоты 5 подключены к первому входу формирователя квадратурного видеочастотного ЧМ сигнала 1, третьему входу квадратурного балансного смесителя 6 и второму входу аналого-цифрового преобразователя 13 соответственно, выход которого подключен к третьему входу вычислителя, первый вход - выход вычислителя 9 является входом - выходом РЛС.
В качестве формирователя квадратурного видеочастотного ЧМ сигнала 1 может быть использована микросхема AD9854 фирмы Analog Devices.
В качестве квадратурного балансного смесителя 2 может быть использована микросхема НМС 495 LP фирмы Hittite Microwave Corp.
В качестве смесителя сдвига 4 может быть использована схема сдвига частоты на основе ФАПЧ [6, стр.63, рис.3.2 г].
Умножитель частоты 6 может быть построен по схеме усилительно-умножительной цепи [7].
Вычислитель 9 может быть выполнен на базе бортовой вычислительной машины [8].
Остальные элементы РЛС (синтезатор частот 5, усилитель низкой частоты 10, смеситель 11, направленный ответвитель 12, антенны 14 и 15) широко используются в радиолокации и не требуют пояснений по реализации.
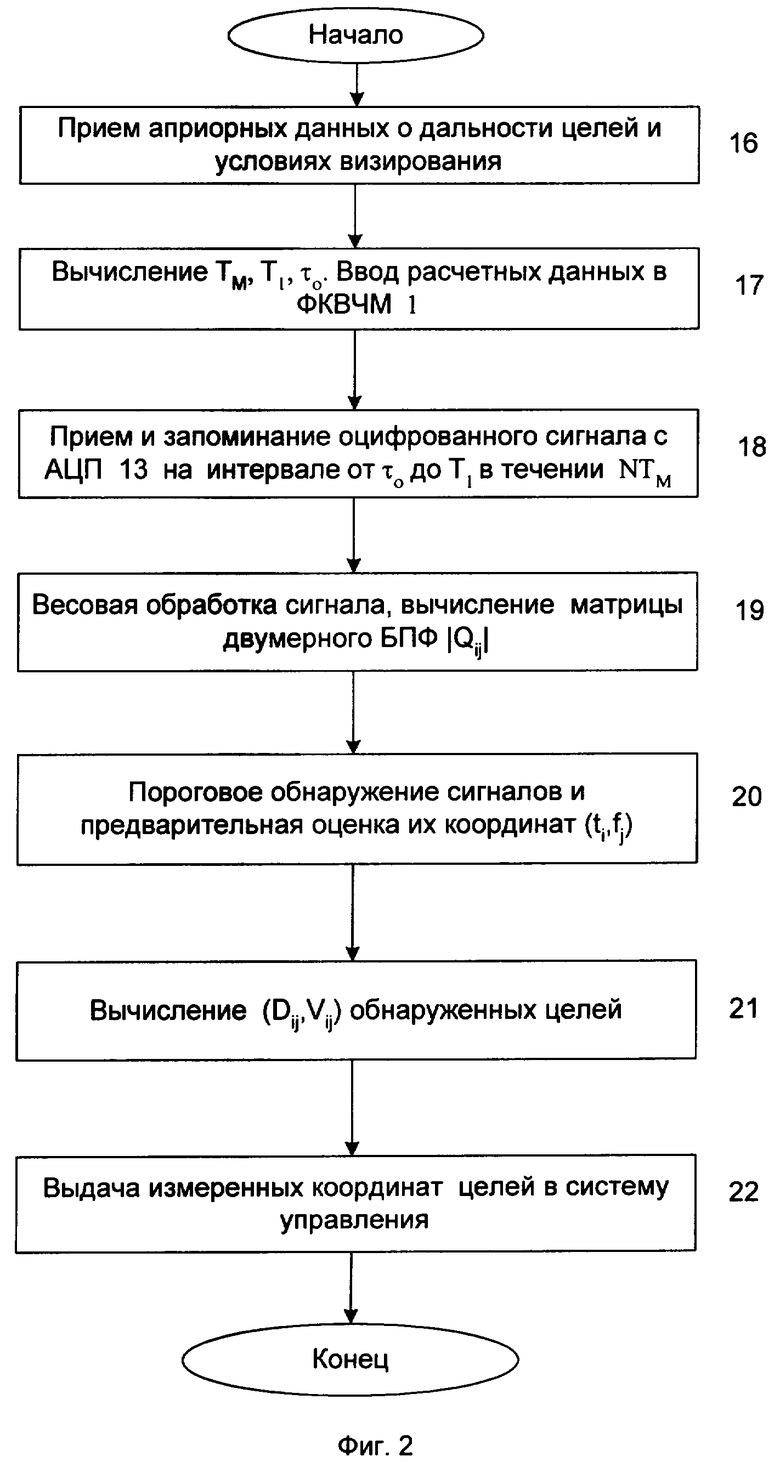
РЛС (фиг.1) работает следующим образом. Прием команд и информации от внешней системы управления, организацию подготовки РЛС к работе, вторичную обработку отраженного сигнала с оценкой дальности и радиальной скорости целей, выдачу измеренной информации в систему управления осуществляет вычислитель 9. Алгоритм его работы приведен на фиг.2
Начало работы РЛС инициируется командой включения, данными о угле между направлением визирования и вектором скорости ЛА, приходящими на первый вход - выход от внешней системы управления (поз.16, фиг.2). Вычислитель 9 по заданным условиям работы проводит расчет параметров частотной модуляции зондирующего сигнала (Тм, T1, Δfв) и вводит их в формирователь квадратурного видеочастотного ЧМ сигнала 1 через второй вход (поз.17, фиг.2). В свою очередь, формирователь квадратурного видеочастотного ЧМ сигнала 1, используя тактовую частоту, приходящую с первого выхода синтезатора частоты 5, формирует аналоговые квадратурные напряжения Uc(ωв,t) и Us(ωв,t), поступающие на первый и второй входы квадратурного балансного смесителя 2. В квадратурном балансном смесителе 2 формируется первичный ЧМ сигнал путем сдвига ЧМ видеосигнала на частоту ω2, приходящую с второго выхода синтезатора частоты 5. Выходная частота квадратурного балансного смесителя 2 ωкбс=ω2+ωв после первого полосового фильтра 3 дополнительно сдвигается по частоте в смесителе сдвига 4 на частоту ω3, формируемую на третьем выходе синтезатора частот 5. В результате умножения выходной частоты смесителя сдвига 4 в m раз умножителем частоты 6, усиления в усилителе мощности 7 и полосовой фильтрации на выходе второго полосового фильтра 8 получают зондирующий сигнал на частоте ωн=m(ωo+ωсдв+ωв(t)) с девиацией Δωдев=m 2 π Δ/fВ. Зондирующий сигнал, проходя через направленный ответвитель 12 на первую (передающую) антенну 15, излучается в направлении цели. Отраженный сигнал принимается приемной антенной 14, поступает на смеситель 11, где смешивается с частью мощности зондирующего сигнала, снимаемой с второго выхода направленного ответвителя 12. В результате на выходе смесителя 11 получают сигнал разностной частоты (сигнал биений), который после усиления в усилителе низкой частоты 10 оцифровывается аналого-цифровом преобразователем 13 с тактом частоты f4, приходящей с четвертого выхода синтезатора частот 5, и поступает на третий вход вычислителя 9, где запоминается, производится его внутрипериодная и межпериодная весовая обработка, двумерное преобразование Фурье, в результате первого преобразования производится внутрипериодное сжатие сигнала по дальности на интервале длительностью Ти, начинающегося от τо (максимальная задержка отраженного сигнала) до Т1, после чего вторым преобразованием производится доплеровская фильтрация (межпериодное накопление сигнала) за N периодов модуляции сигнала. В результате получают комплексную амплитуду Q(ti,fi) отраженного сигнала в координатах время (ti) - частота (fj), i - номер выборки сигнала биений на интервале Ти,  Полученная матрица комплексных амплитуд Q(ti,fi) сигнала преобразуется в матрицу мощностей сигнала P(ti,fj) в тех же координатах по формуле:
Полученная матрица комплексных амплитуд Q(ti,fi) сигнала преобразуется в матрицу мощностей сигнала P(ti,fj) в тех же координатах по формуле:
P(ti,fj)=|Q(ti,fj)|2,
и используется для порогового обнаружения сигнала цели (поз.20 фиг.2):

Для точек сцены (ti,fj), где S(ti,fj)=1 (обнаружен сигнал), вычислителем 9 определяется дальность Di,j и радиальная скорость Vi,j обнаруженной цели (поз.21 фиг.2) по формулам:
Di,j=c(ti-fj/k1)/2,
Vi,j=fjλ/2,
где λ - длина волны зондирующего сигнала.
Измеренные координаты обнаруженных целей (Di,j, Vi,j) выдаются в систему управления через информационную шину, подключенную к первому входу - выходу вычислителя 9 (поз.22, фиг.2).
Техническим преимуществом предлагаемого способа формирования ЧМ сигнала и РЛС, реализующей его, пред прототипом является как высокая линейность ЧМ периодического сигнала с треугольной модуляцией (соответственно более высокая точность), так и когерентность зондирующего сигнала в разных периодах повторения модуляции (обеспечиваются высокостабильными частотами синтезатора частоты и прямым цифровым синтезом квадратурного ЧМ сигнала на видеочастоте по цифровым отсчетам, находящимся в памяти, или рассчитываемым в реальном времени). Изменение питающих напряжений, температуры и старение не смогут привести к относительному изменению несущей частоты зондирующего сигнала более чем на 10-4 (определяется параметрами кварцованной эталонной частоты в синтезаторе частоты), что на порядок меньше, чем в способе прототипа. Современная элементная база позволяет получать зондирующий сигнал с заданной линейностью на базе микросхем и узлов, имеющих существенно меньшие габаритно-массовые характеристики, чем в прототипе (не требуется опорный сигнал, для получения которого необходимы СВЧ устройство задержки зондирующего сигнала, отдельный смеситель для получения разностной частоты между опорным и зондирующим сигналами, устройства измерения текущего мгновенного и среднего периодов разностной частоты. Предложенное решение по формированию ЧМ сигнала не известно и соответствует критериям новизны и изобретательского уровня. В частности, цифровые отсчеты, преобразованные в аналоговое напряжение, в настоящем способе использованы не для модуляции частоты выходного генератора, а являются ЧМ сигналом видеочастоты, который путем сдвига по частоте и последующего умножения в целое число раз преобразуется в зондирующий с требуемой девиацией. При этом обеспечивается когерентность зондирующего сигнала в разных периодах повторения за счет обеспечения повторяемости закона модуляции зондирующего сигнала с точностью до фазы.
Пользуясь сведениями, представленными в материалах заявки, предлагаемая РЛС может быть изготовлена по существующей, известной в радиопромышленности технологии, на базе известных комплектующих изделий и использована при измерениях положения целей в координатах дальность - доплеровская частота.
Источники информации
1. В.М.Свистов. Радиолокационные сигналы и их обработка. М.: Сов. Радио. 1977 г., стр.289, рис.6.10.
2. Патент США № 5387918 от 5.07.95, кл. G01S 13/32. Method and Arrangement for measuring distances using the reflected beam principle.
3. Патент США № 5546088 от 13.08.96, кл. G01S 13/18. High-precision radar finder.
4. Патент Японии № 20002244918 от 25.08.2003, кл. G01S 13/34. Waveform generation method, waveform generation program, waveform generation cirquit and radar device.
5. Патент России № 2234716 от 04.03.2003, кл. G01S 13/34. Способ формирования частотно-модулированного сигнала для дальномера с периодической частотной модуляцией.
6. А.В. Рыжков, Попов В.Н. Синтезаторы частоты в технике радиосвязи. М.: Радио и связь. 1991 г., стр. 63, рис. 3.2 г.
7. Модуль УУЦ-АРМ, МАВИ 600-0672. ОАО "УПКБ "Деталь" г. Каменск-Уральский Свердловской области.
8. Бортовая вычислительная машина ВБ-480-01. Руководство по эксплуатации НКШР.466535.020 РЭ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ШИРОКОПОЛОСНОСТИ ПРИЕМОПЕРЕДАЮЩЕГО МОДУЛЯ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, ИСПОЛЬЗУЮЩЕГО ГЕНЕРАЦИЮ СИГНАЛОВ МЕТОДОМ ПРЯМОГО ЦИФРОВОГО СИНТЕЗА, И ВАРИАНТЫ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2392704C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ НЕПОДВИЖНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ШУМОВОГО СИГНАЛА И ШУМОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2024 |
|
RU2831136C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| МОНОИМПУЛЬСНАЯ РЛС МИЛЛИМЕТРОВОГО ДИАПАЗОНА | 2015 |
|
RU2600109C1 |
| СПОСОБ КОГЕРЕНТНОГО ПРИЕМА ОТРАЖЕННОГО СИГНАЛА ПРИ НЕКОГЕРЕНТНОМ ИЗЛУЧЕНИИ ЗОНДИРУЮЩЕГО СИГНАЛА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2315331C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
Предлагаемое изобретение относится к радиолокационной измерительной технике и может быть использовано в РЛС с непрерывным периодическим излучением с произвольной треугольной частотной модуляцией (ЧМ), измеряющей положение целей в координатах дальность - частота, а также в радиолокационных станциях (РЛС) картографирования. Достигаемым техническим результатом изобретения является повышение точности измерения в РЛС с периодическим частотно-модулированным (ЧМ) сигналом с произвольной треугольной модуляцией за счет обеспечения высокой линейности изменения несущей частоты во времени с обеспечением возможности межпериодного когерентного накопления. Указанный результат достигается за счет генерирования цифровых отсчетов в фиксированные моменты времени, преобразования их в дискретные аналоговые отсчеты и низкочастотной фильтрации дискретных аналоговых отсчетов с получением аналоговых квадратурных (синусных и косинусных) ЧМ на видеочастоте сигналов с треугольной частотной модуляцией с требуемым периодом модуляции и с девиацией в m раз меньшей требуемой девиации зондирующего сигнала, перенос квадратурного ЧМ на видеочастоте сигнала на более высокую несущую частоту с помощью квадратурного балансного смесителя, умножение частоты полученного сигнала в m раз, усиление сигнала до требуемой мощности в заданной полосе частот. 2 н. и 1 з.п. ф-лы, 2 ил.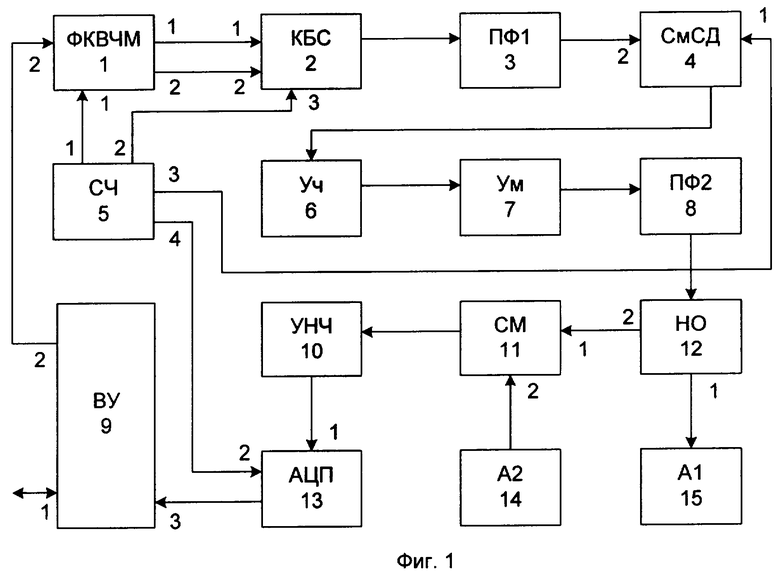
| СПОСОБ ФОРМИРОВАНИЯ ЗОНДИРУЮЩЕГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ ДАЛЬНОМЕРА С ПЕРИОДИЧЕСКОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2003 |
|
RU2234716C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2262716C2 |
| РАДИОЛОКАТОР | 2000 |
|
RU2178185C2 |
| US 6492938 A, 10.12.2002 | |||
| US 6104336 A, 15.08.2000 | |||
| Регулятор расхода | 1982 |
|
SU1043601A2 |
| СПОСОБ ПОЛУЧЕНИЯ ЭПОКСИКАУЧУКОВОЙ КОМПОЗИЦИИ | 1992 |
|
RU2063336C1 |

