(54) ДИНАМОМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛ | 1972 |
|
SU435463A1 |
| Электромеханический динамометр | 1978 |
|
SU717570A1 |
| ПТ Б | 1973 |
|
SU393962A1 |
| Динамометр | 1978 |
|
SU769369A1 |
| Устройство для измерения натяжения металлизируемых рулонных материалов | 1979 |
|
SU979913A1 |
| Устройство для взвешивания мульд | 1978 |
|
SU744238A1 |
| Силоизмерительный датчик | 1979 |
|
SU1004780A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОСТАВЛЯЮЩИХ ВЕКТОРОВ АЭРОДИНАМИЧЕСКОЙ СИЛЫ И МОМЕНТА | 2005 |
|
RU2287795C1 |
| Силоизмерительное устройство | 1981 |
|
SU998877A1 |
| УСТАНОВКА ДЛЯ КОМПРЕССИОННЫХ ИСПЫТАНИЙ ГРУНТА | 2003 |
|
RU2245963C1 |
Изобретение относится к силойзмеритепьной технике и может быть использовано в качестве силонзмеритепьного цатч чика в электромеханических весах раэличного назначения. Известны динамометры, содержащие грузопрнемную балку с установленным на ней корпусом подшипника. Балка подд живается в вертикальном направле йгин двумя магнитоупругими, преобразователя ми, закрепленным на опорной плите. Предварительное поджатие преобразова- телей обеспечивается винтовой пружиной растяжения соединяющей балку с плитой и установленной вертикально вдоль линий, проход1пцей через центр подшипника. Балка прикреплена к вертикальным стойкам опорной шшты посредством упругих шарниров, обладающих податливостью в вертикальном направлении, Магнитоупругие преобразователи воспринимают практически полностью вертикальную составляющую силы взаимодей- чгтвия вала с подшипником, при этом каждый преобразователь в процессе нагружения балки испытывает дополнительную деформацию сжатия 1 . : Точность и чуъствительность этого динамометра определяется точностью н чувствительностью магнитоупругих преобразователей. Линейный диапазон измеряемых сил равен сумме соответствзпоших диапазонов преобразователей. Динамометр не расширяет рабочий цнапазсш преобразования, представляющий собой часть полного диапазона, где относительная погрешность линейности магнитоупругого преобразователя не превосходит некоторой заданной величины. Кроме того, этот динамометр не обеспечивает кйррекции аддитивных погрешностей, обусловленных изменением питания магнитоупругих Преобразователей, колебаниями температуры окружающей среды и. т.д. Достоинством устройства является то, что при идентичных линейных характеристиках магнитоупру гих преобразователей показания не зависят от положения точки приложения измеряемой силы в балке.
Наиболее близким по технической сущности является динамометр, состоящйй из двух одинаковых корпусов, выполненных в виде разрезной скобы, в которой размешены с предварительным поджатием магнитоупругие преобразователи трансформаторного типа с двумя взаимно перпендикулярными обмотками. Корпуса монтируются на опорной плите вдоль ее продольной оси. При этом каждый корпус устанавливается в плите на двух призматических опорах. В верхней части динамометра установлена травер са с двумя призмами на концах. Траверса своими концами свободно опирается на каяодый корпус. Измеряемое усилие действует на контактный, шар траверсы и через опорные призМ1 г передается на корпуса, при этом каждый преобразователь в процессе нагружения траверсы испытывает дополнительную деформацию сжатия .,
В данном динамометре каждый корпус выполняет функцию механического делителя силы в заданном отношении, что позволяет растянуть линейный учаотоК характеристики преобразователя и этим раситарить верхний предел измерения в сторону больших значений иэмеряемой силы. Однако расшире гая рабочего диапазона преобразования не происходит, посколысу с расширением верхнего предела измерения соответственно увеличивается и нижний предед. численно равный порогу чувствитедьнооти. Коррекции аддитивных погрешностей также не происходит.
Целью пзобретения .является повььшение точностиизмерения путем создания динамометра на базе монолитного бруса, обладающего свойством ейтест венного расширения рабочего диапазона как вверх, так и вниз, не имеющего аддитивных погрешностей и не чувствительного при этом к возможным пере- метцениам точки приложения измеряемой силы вдоль продольной оси бруса. Для этого тфименен наиболее дей- стве1шый и поэтому широко используемый на практике метод расширения рабочего диапазона, основанный на дифференциальном включе1ши двух преобре зователей. .
На одном конце бруса опора распол жена со Стороны противоположной н&правлению действия силы ., а на друг.
гом конце бруса - со стороны .действия силы, причем упругое плечо на первом конце бруса, взаимодействующее с си- оизмерительным преобразователем и порой, а также упругое плечо на втоом конце бруса, взаимодействуютцее с илоизмерительным преобразователем, расположены по отношению к нейт альному слою бруса со стороны, противоположной направлению действия сипы, а упругое плечо на первом конце бруса, взаимодействующее с силоизмерительным реобразователем, а также упругое пл&о на втфом конце бруса, взаимодействующее с опорой и силоизмерительным реобразователем, расположены по отношению к нейтральному слою бруса со стороны действия силы.- .
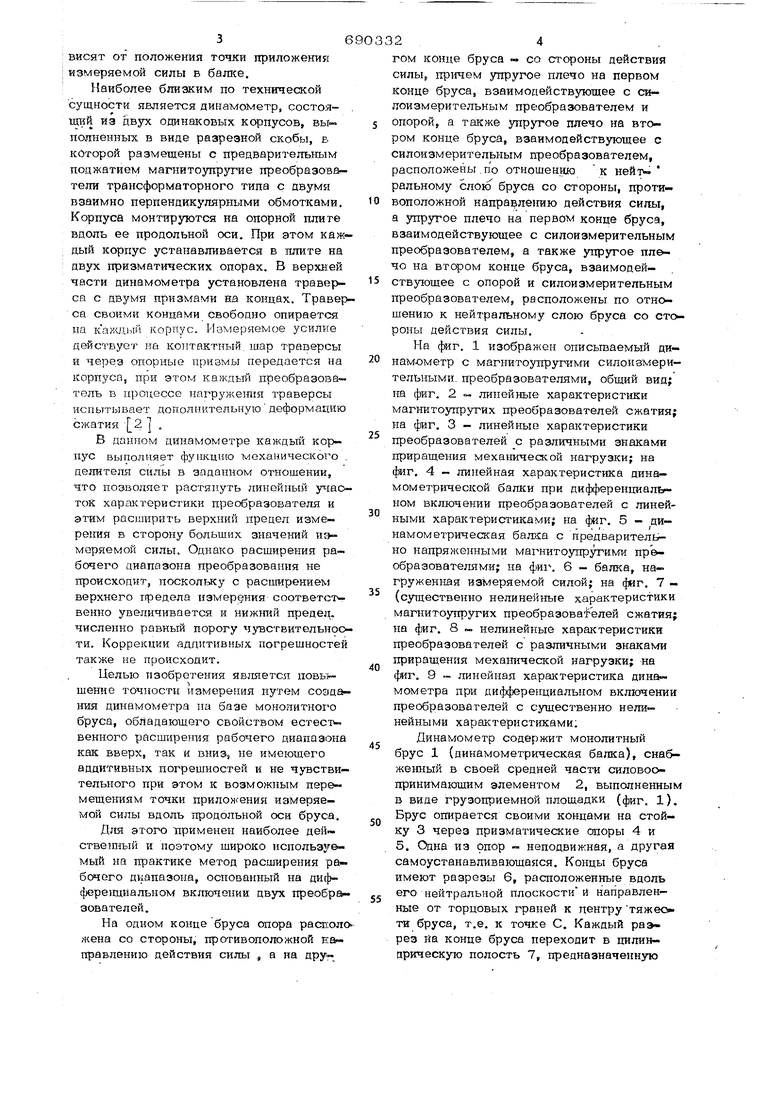
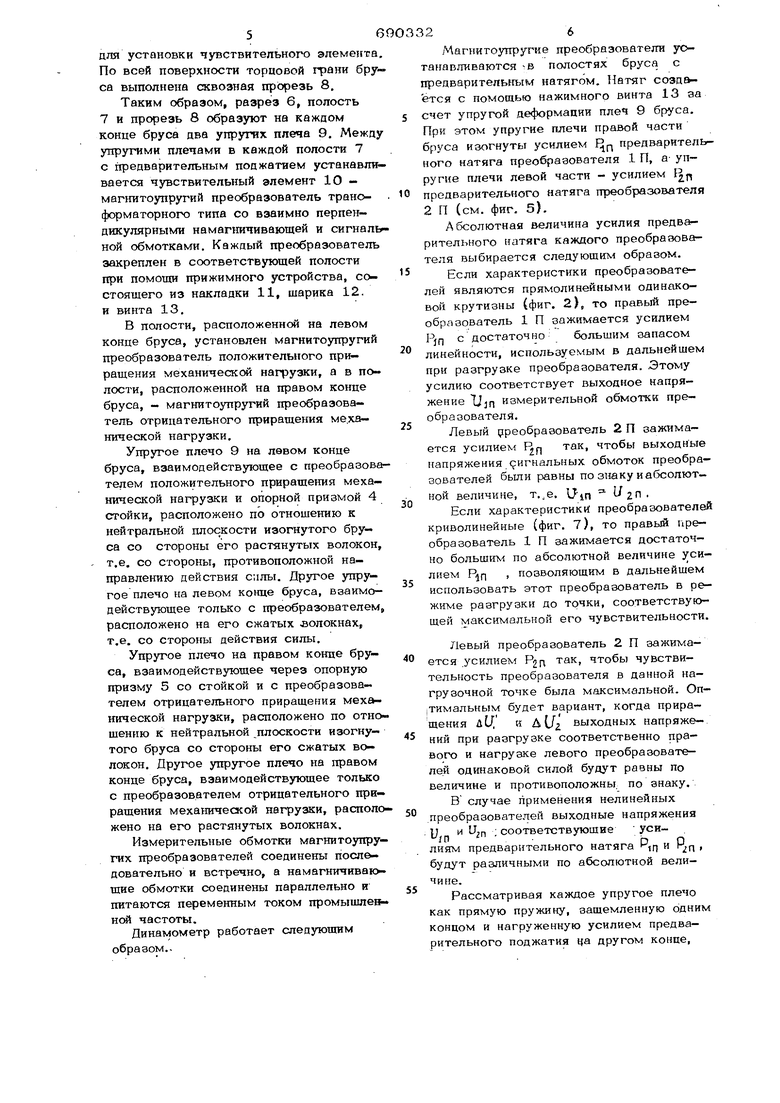
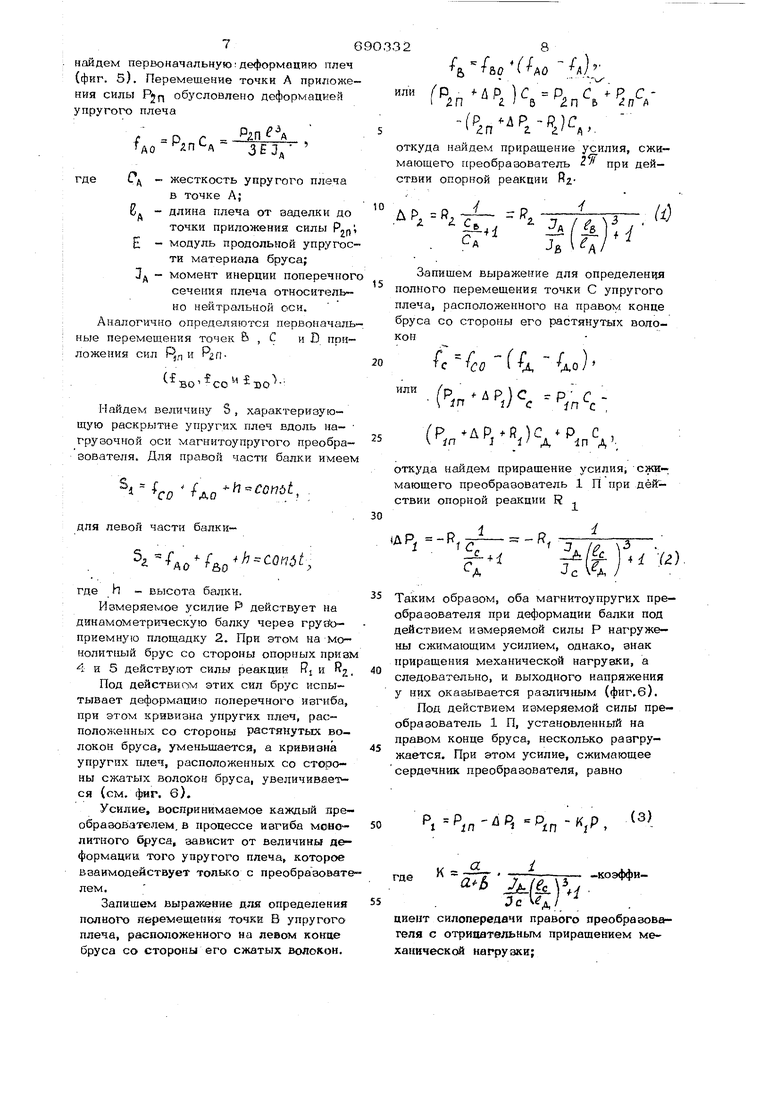
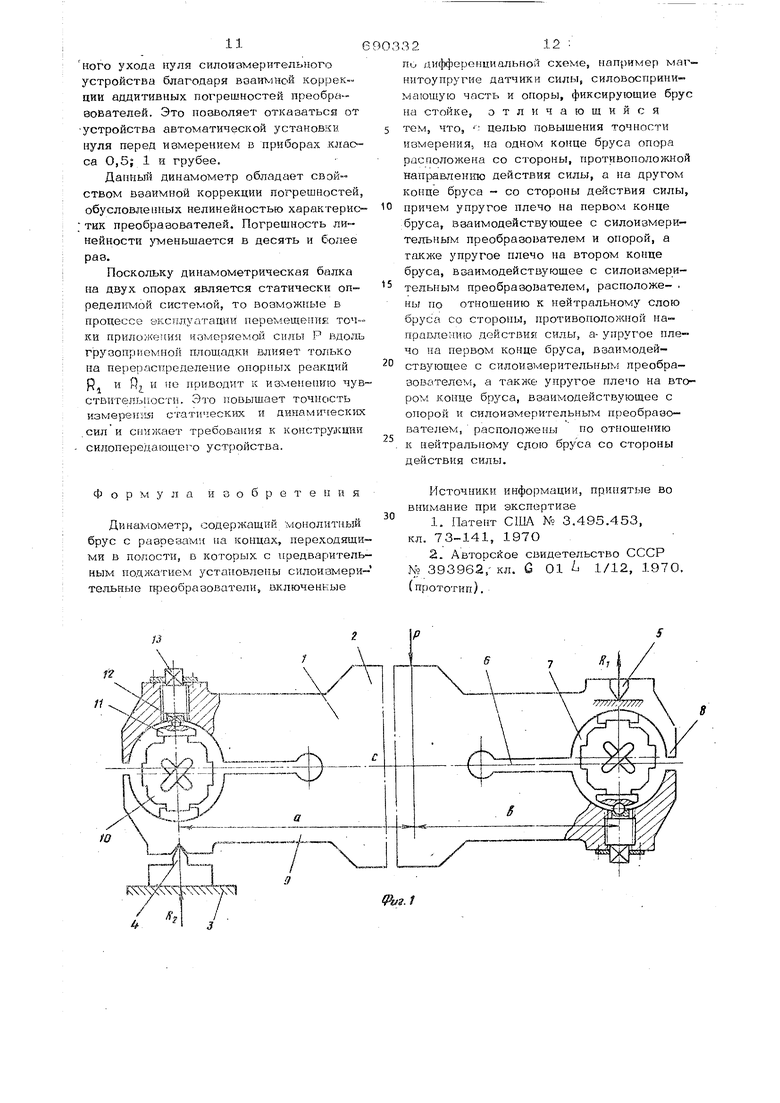
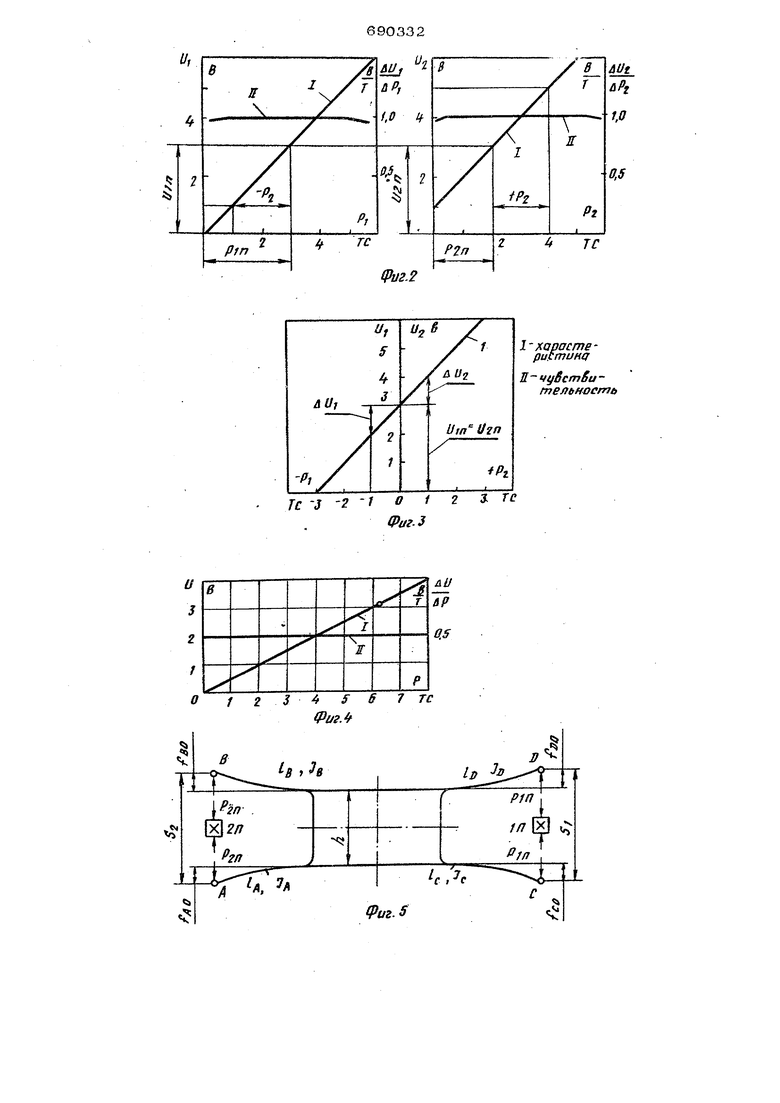
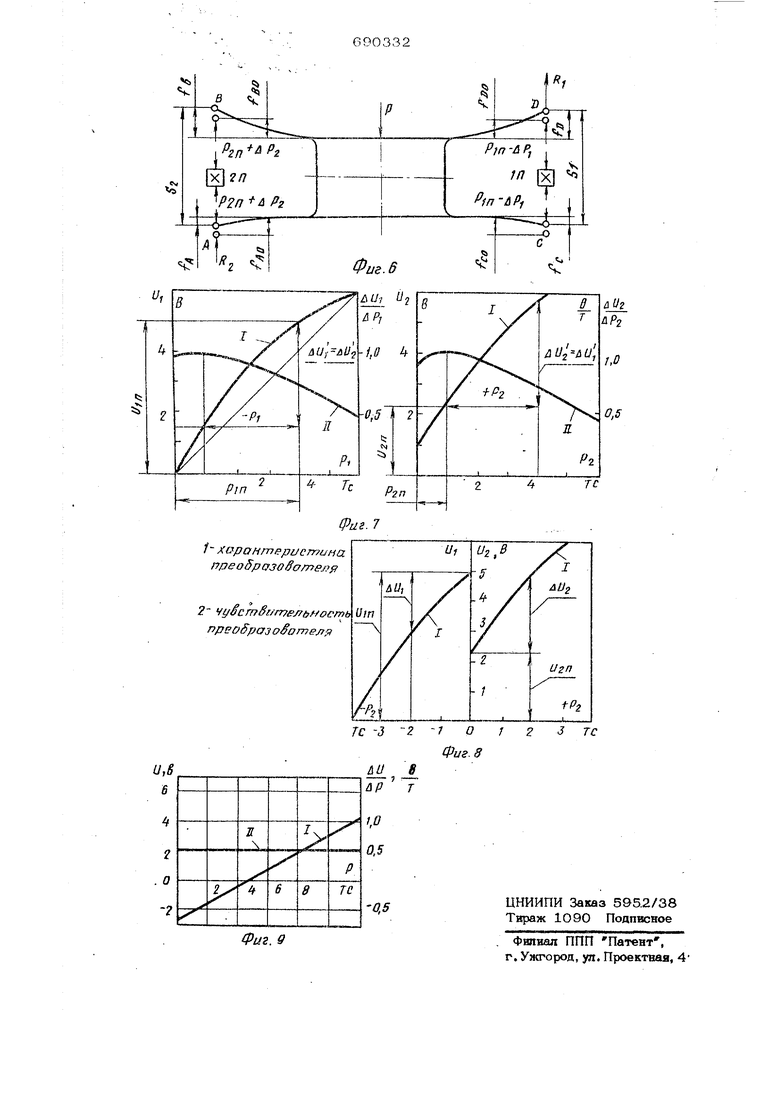
На фиг, 1 изображен описьтаемый динамометр с магнитоупругими силоизмери- тельными, преобразователями, общий вид; на фиг. 2 - линейные характеристики мйгнитоупругих преобразователей сжатия; на фиг. 3 - линейные характеристики преобразователей с различйыми знаками приращения механической нагрузки; на фиг. 4 - линейная характеристика динамометрической балки при дифференциальном включении преобразователей с линейными характеристиками; на фиг. 5 - динамометрическая балка с прёдварител1 но напряженными магнитоупругими пр&образователямй; на фиг. 6 - балка. На- . груженная измеряемой силой; на фиг. 7 (существенно нелинейные характеристики, магнитоупругих преобразова елей сжатия; на фиг. 8 - нелинейные характеристики преобразова:телей с различными знаками приращения меха1П1ческой нагрузки; на фиг. 9 - линейнай Характеристика динамометра при дифференциальном включении преобразователей с существенно нелинейными характеристиками;
Динамометр содержит монолитный брус 1 (динамометрическая балка), сна&женный в своей средней части силовоопринимающим элементом 2, выполненным в виде грузоприемной площадки (фиг. 1). Брус ояирается своими концами на стойку 3 через призматические опоры 4 и 5. Одна из опор - неподвижная, адругая самоустанавпивающаяся. Концы бруса имеют разрезы 6, расположенные вдоль его нейтральной плоскостии направленные от торцовых граней к пентрутяжео ти бруса, т.е. к точке С. Каждый раэрез на конце бруса переходит в цилиндрическую полость 7, предназначенную
для установки чувствительного элемента По всей поверхности торцовой грани бруса выполнена сквозная прорезь 8,
Таким образом, разрез 6, полость 7 и прорезь 8 образуют на каждом конце бруса пва упругих плеча 9. Между упругими плечами в каждой полости 7 с гфедварительным попжатием устанавливается чувствительный элемент 10 - магнитоупругий преобразователь траноформаторного типа со взаимно перпендикулярными намагничивающей и сигналитной обмотками. Каждый преобразователь закреплен в соответств5гю1цей полости при поможи прижимного устройства, состоящего из накладки 11, шарика 12. и винта 13.
В полости, расположенной на левом конце бруса, установлен магнитоупругий преобразователь положительного приращения мёханическсй нагрузки, а в полости, расположенной на правом конце бруса, - магнитоупрутий преобразователь отрицательного приращения ме.ханической нагрузки.
Упругое плечо 9 на левом конце бруса, взаимодействующее с преобразователем положительного приращения механической нагрузки и опорной призмой 4 стойки, расположено по отношению к нейтральной плоскости изогнутого бруса со стороны его растянутых волокон, т.е. со стороны, противоположной направлению действия силы. Другое упругое плечо на левом ковде бруса, взаимодействующее только с преобразователем, расположено на его сжатых волокнах, т.е. со стороны действия силы.
Упругое плечо на правом конце бру са, взаимодействующее через Опорную призму 5 со стойкой и с преобразователем отрицательного приращения мех&нической нагрузки, расположено по отношению к нейтральной плоскости изогнутого бруса со стороны его сжатых волокон. Другое упругое плечо на правом конце бруса, взаимодействующее только с преобразователем отрицательного приращения механической нагрузки, расположено на его растянутых волокнах.
Измерительные обмотки магнитоупру- гих преобразователей соединены последовательно и встречно, а намагничивак щие обмотки соединены параллельно и питаются переменным током промыщлевк
нсА частоты.
Динамометр работает следующим
образом..
Магнитоупрутие преобразователи уотанавливаются iB полостях бруса с предварительным нвтягом. Натяг созд ётся с помощью нажимного винта 13 за счет упругой деформации плеч 9 бруса. При этом упругие плечи правой части бруса изогнуты усилием 1, предварительного натяга преобраэователн 1 П, а упругие плечи левой части - усилием 1( предварительного натяга преобразователя
0 2 П (см. фиг. 5).
Абсолютная величина усилия предварительного натяга каждого преобразователя выбирается следующим образом.
5
Если характеристики преобразователей являются прямолинейными одинаковой крутизны {фиг. 2), то правьй преобразователь 1 П зажимается усилием Pjrj с достаточно большим запасом
0 линейности, используемым в дальнейшем при разгрузке преобразователя. Этому усилию соответствует выходное напряжение Ijjn измерительной обмотки преобразователя.
5
Левый цреобравователь 2 П зажимается усилием RPI так, чтобы выходные напряжения 9игнальных обмоток преобразователей были равны по знаку иабсолютной величине, т.,е. zn .
0
Если характеристики преобразователей криволинейные (фиг. 7), то правый преобразователь 1 П зажимается достаточно большим по абсолютной величине силием Rjn , позволяющим в дальнейшем
5 использовать этот преобразователь в режиме разгрузки до точки, соответствующей максимальной его чувствительности.
Левый преобразователь 2 П зажимается .усилием Р2П так, чтобы чувствительность преобразователя в данной нагрузочной точке была максимальной. Оп- |тимальным будет вариант, когда приращения лЦ и Д(У выходных напряже-.
5 НИИ при разгрузке соответственно правого и нагрузке левого преобразователей одинаковой силой будут равны по величине и противоположны, по знаку,
В случае применения нелинейных .преобразователей выходные напряжения и ; соответствующие усилиям предварительного натяга и Р;р , будут различными по абсолютной величине.
5
Рассматривая каждое упругое плечо как прямую пружину, защемленную одним концом и нагруженную усилием предварительного поджатия ца другом конце. 7; найдем пер BO начальную: деформацию плеч (фиг. 5), Перемещение точки А приложе ния силы Pjp обусловлено деформацией упругого плеча РЛП жесткость упругого плеча в точке А; длина плеча от заделки до точки приложения силы Р.,, модуль продольной упругос ти материала бруса; мЬмейт инерции поперечног сечения плеча относительно нейтральной оси. Аналогично определяются первоначаль ные перемещения точек Ь , С и D при- ложения сил Rn и Ran- Найдем величину S, характеризую- щукЭ раскрытие упругих плеч вдоль нагрузочной оси магнитоупругого преобразователя. Для правой части балки имеем л - -С / V/7 тлп «-U/b -, ДЛЯ левой части балки: . где )l - высота балки. Измеряемое усилие Р действует на динамометрическую балку через груйо- приемную площадку 2. При этом на монолитный брус со стороны опорных призм 4 и 5 действуют силы реакции RI и R Под действием этих сил брус испытывает деформацию поперечного нагиба, При этом кривизна упругих плеч, расположенных со стороны растянутых волокон бруса, уменьшается, а кривизна упругих плеч, расположенных со егороны сжатых волокон бруса, увеличивается {см. фиг. б),; : Усилие, воспринимаемое каждый преобразобателем, в процессе изгиба монолитного бруса, зависит От величины деформаций того унругого плеча, которое взаимодействует только с преобразовате лем. Запишем выражевие пая определения полного перемещения точки В упругого плеча, расположенного на левом конце бруса со сто РОНЫего сжатых волокон. 2 л 60 I МО Л/ Ь Т60 ( АО }С Р (Р.-.МР. л2.П г -(р, ,-(,)(:, откуда найдем приращение усилия, сжипри деймающего преобразователь ствии опорной реакции RZДР, ft. Запишем выражение для определения полного перемещения точки С упругого йлеча, ра;сположенного на правом конце бруса со стороны его растянутых вояоifcoH .. С CQ . I Cl, {4.0 ) )Л - Р Г fn-c , (Р,, ,) Р.. откуда найдем прирапхение усилия; сжи мающего преобразователь 1 П при действии опорной реакции R ДР. -f образом, оба магнйтоупругих преобразов ателя при деформации балки под действием измеряемой силы Р нагруже ны сжимающим усилием, однако, знак приращения механической йагруаки, а следобатёльно, н выходного напряжения у них оказывается различным (фиг.б). Под действием измеряемой силы преобразователь 1 П, установленный на правом конце бруса, несколько разгружается. При afovi усилие, сжимающее сердечник преобразователя, равно Р, , Р,, -коэффиа Ь Л . jdv/ циевт силопереаачи правого преобразов геля с отрицательным приращением механической нагрузки; и и 5 расстояния от точки прилож ния измеряемой силы к балке до ее пр матических опор. Выходное напряжение правого преоб зователя 1 П равно (фиг. 3 и 8) . (4) Под действием измеряемой силы преоб разователь 2 П, установленный на лев конце бруса, несколько догружается, п этом усилие, сжимающее серйечник- пре образователя, равно 6г,ДР, Р,п Л-, Р., где Я фициент передачи левого преобразовате ля с положительным приращением меха нической нагрузки. .Выходное напряжение левого преобр зователя 2 П равно (фиг. 3 и 8) Результирующее-, напряжение йвух прёоб рааювателей при дифференциальном вклю чении измерительных обмоток равно Ч ;()-(. -(( . .Проанализируем уравнения (1), (2), (З) (5У;и (t). Если пуйстБительность преобразов зтелей одинакова и характеристики их прямолинейны (фиг, З), то ириУгпЦп с-4 и .а . А -6 Л прирашения й и и Лг5: м механической нагру1эки равны и противоположны по знаку, др,.-К,Р -у-; К Р ЛР, Поскольку в атом случае приращения uU ч uUt выходных напряжений также лэавны и противоположны по внаку. то p 32 зультирующее напряжение определяется так (; (/; формулы (8) следует, что чувствительность динамометрической дифференциальной балки-в два разаменьше чувствительности преобразователей. Характеристика балки с линейными, преобразователями также линейная и выходит из начала координат (фиг. 4). Применение динамометра расширяет верхний предел измерения преобразователя в четыре раза (К-.), при этом нижний предел обусловленньй порогом чувствительности, увеличивается только в два раза. Это способствует уве. личению полного диапазона Фп дреобразования в два раза. Чувствительность динамометра с линейными преобразователями не зависит от изменения положения точки приложения измеряемой силы Р к балке, что очевидно (фиг. З). Если характеристики преобразователей 1 П и 2 П криволинейны с одинаковым характером изменения чувствительности/ то равные и противоположные по знаку приращения йР и йр2 механической нагрузки преобразователей вызывают соответствующие приращения U У и U U выходных напряжений, которые противоположны го знаку, но не равны по величине (фиг. в). Дифференциальное включение нелинейных преобразователей, работающих на идентичных участках выходных характеристик, приводит -к тому, что погрещности нелинейности при строгом равекстве чувствительностей обоих преобразователей, взаимно корректируются. Характеристика динамометра с нелинейными преобразователями линейная, -ао выходит на из начала координйт, а с некоторым; смещением (фиг. 9). Применение описанного динамометра позволяет создавать достаточно точные, . илоизмерйтельные и весоизмерительные приборы и не имеет аддитивной составляющей погрешности измерен ия. Изменения температуры окружающей среды, режима пианщя намагничивающих обмоток, ослабления в механических контактах устрЬйства предварительного поджатия магнитоупорного преобразователя, старение материала и, т.п. не вызывают существенного ухода нуля сипоизмерительного устройства благодаря взаимной коррекции аддитивных погрешностей преобразователей. Это позволяет отказаться от устройства автоматической установки нуля перед измерением в приборах класса 0,5; 1 и грубее.
Данный динамометр обладает свойством веаимпой коррекции погрешностей, обусловленных нелинейностью характерис ТНК преобразователей. Погрешность линейности уменьшается в десять и более раз.
Поскольку динамометрическая балка на двух опорах является статически определимой системой, то возможные в процессе эксплуатации перемещения точки приложения измеряемой силы Р вдоль грузоприемной.площадки влияет только на перераспределение опорных реакций Р и Р, и не приводит к Изменению чувствительности. Это повышает точность измерения стати юских и динамических . снижает требования к конструкции силопередающего устройства.
Формула Изобретения
Динамометр, содержащий монолитный брус с разрезами на концах, переходящими в полости, в которых с предваритель-г ным поджатием установлены силоизмерительные преобразователи, включенные
по дифференциальной схеме, например маг- нитоупругие датчики силы, силовоспринимагощую часть и опоры, фиксирующие брус на стойке, отличающийся тем, что, с целью повышения точности измерения, на одном конце бруса опора расположена со стороны, противоположной направлению действия силы, а на другом конце бруса - со стороны действия силы, причем упругое плечо на первом конце бруса, взаимодействующее с силоизмерительным преобразователем и опорой, а также упругое плечо на втором конце бруса, взаимодействующее с силойзмерительным преобразователем, расположе- . ны по отношению к нейтральному слою бруса со стороны, противоположной направлению действия силы, а- упругое плечо на первом конце бруса, взаимодействующее с силоизмерительным преобразователем, а такисе упругое плечо на втором конце бруса, взаимодействующее с опорой и силоизмерительным преобразователем, расположены По отношению к нейтральному срою бруса со стороны действия силы.
Источники информации, принятые во внимание при экспертизе
№ 393962,- кл. С 01 -fj 1/12, 1970.
(прототип).
Тс -} -2 -1 О 72 3- ГС
is h
Л, 7У1
IPU2.2
l- apacme pufmuHor
n yScmBu тельность Фаг-З
f,f
ipuz. S
.7
f XcfpoHmepucmuHu npeo5po3oSorr effff
2- vyecmSvmejfbf ocrnb npeoSpasoSomejff)
j г 3 ТС
Те -3 -2-1 О Фиг. 8
