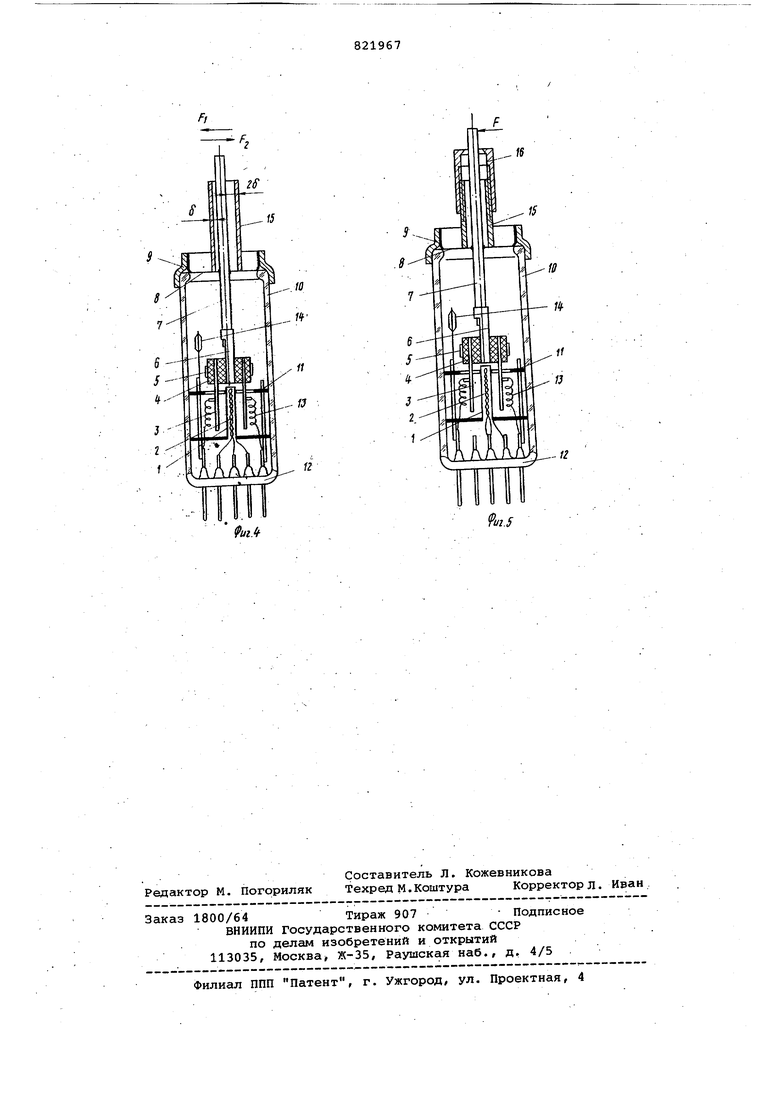
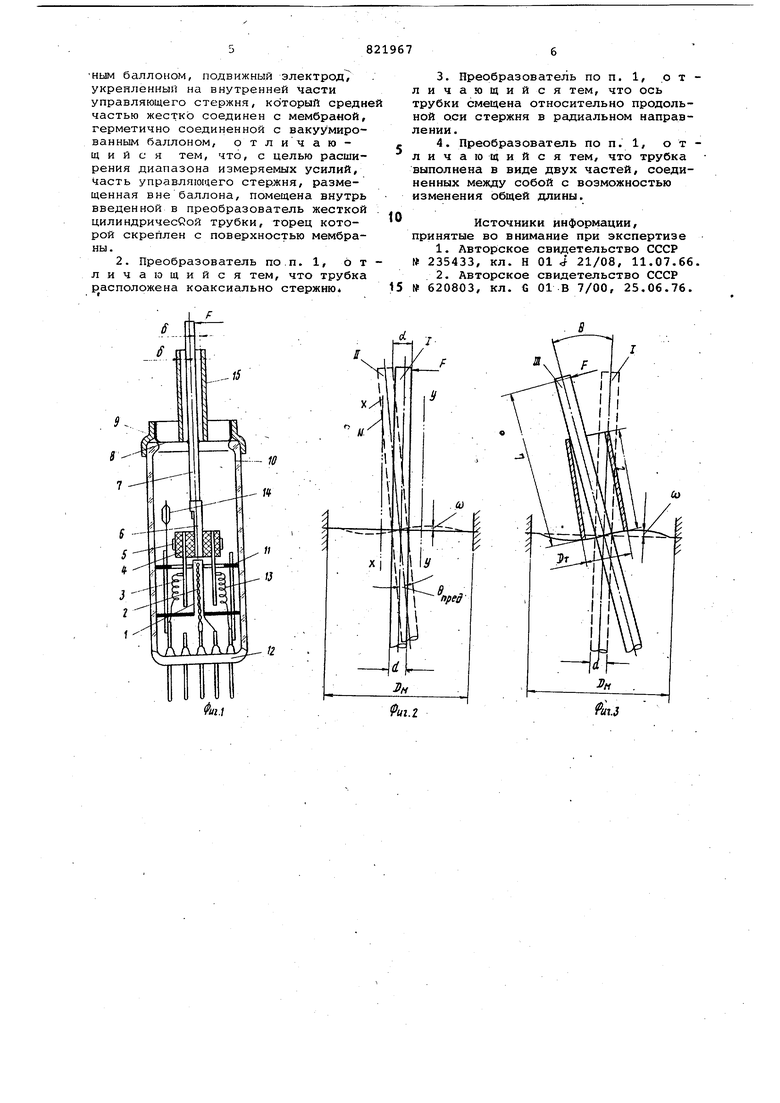
ИзоОретение относится к силоиэмерительной технике, а именно к преобразователям Механических величин в электрические. Известен механотронный преобразователь , содержащий неподвижные электроды, жестко соединенные с вакуумированным баллоном и подвижные электроды, укрепленные на внутренней час ти управляющего стержня, который сое динен с упругим элементом, являкадимся частьк баллона Г1 . Недостатком такого преобразовател является то, что он не позволяет поч высить точность измерений быстроизме няющихся процессов. Известен также механотронный прео разователь перемещений, содержащий неподвижный электрод, жестко соединенный сг вакуумированным баллоном, подвижный электрод укрепленный на внутренней части управляющего стержня, который средней частью жестко соединен с мембраной, герметично соединенной с вакуумированным баллоном 2. Недостатком этого механотронного преобразователя является ограниченность диапазона измеряеншх усилий. Цель изобретения - расширение диапазона измеряемых усилий. Цель достигается тем, что в механотронном преобразователе часть управляющего стержня, размещенная вне баллона, помещена внутрь введенной в преобразователь жесткой цилиндрической трубки, торец которой скреплен с поверхностью мембраны. Причем трубка расположена или коаксиальнр стержню, или ось трубки смещена относительно продольной оси стержня в радиальном направлении. . Трубка выполнена в виде двух частей, соединенных между собой с возможностью измерения общей длины. На чертеже представлен механотронный преобразователь. На фиг. 1 изображен механотронный преобразователь, выполненный с коаксиальным расположением трубки относительно стержня механотрона; на фиг. 2 и 3 - схемы, поясняющие принцип действия преобразователя; на фиг. 4 механотронный преобразователь с осью трубки, смещенной относительно продольной оси стержня; на фиг. 5 - механотронный преобразователь с трубкой выполненной в виде двух частей, соединенных между собой с возможностью изменения общей длины. Механотронный преобразователь (фиг. 1) содержит неподвижный подогревный, катод 1, подогреватель 2, дв подвижных анода 3, укрепленных при помощи керамических изоляторов 4, пистона 5 и держатель б на внутренне конце стержня 7, который впаян в центр мембраны 8. Последняя посредством фланца 9 гарметично соединяется с вакуумированным баллоном 10. Узел катод-подогреватель в баллоне укреплен при помощи слюдяных изолято ров 11. Все электроды механотрона электрически соединены с выводами ци циколя 12, причем соединение подвижных анодов с выводами цоколя осуществляется эластичными контактными пружинками 13. Механотрон снабжен стандартным распыляемым газопоглотителем 14. Кинематическая система механотронного преобразователя, образованная круглой, закрепленной по краю Мембраной 8 и, стержнем 7, снабжена жесткой трубкой 15, расположенной коаксиально относительно внешней части стержня, причем один из концов трубки 15 припаян к поверхности мембраны. Измеряемая сила F прикладывается К концу внешней части стержня механотрона. Под действием силы F мембра на механотрона подвергается так называемому асимметричному изгибу (фиг. 2). При этом чувствительность кинематической системы типа мембрана стержень определяется по формуле I . d. эр)-ь (Ju.} Гр pfA ,,. Vr -lr--nri-- а где tk- - перемещение конца штыря механотрона, возникающее под действием силы F; 1 - расстояние от точки приложе ния силы F до мембраны, обы но равное длине стержня мех нотрона; (Ь - постоянный коэффициент, учи тывающий действие атмосферн го давления на мембрану Ё; (it - модуль упругости и коэффици ент Пуассона материала мембраны; диаметр мембраны) d - диаметр стержня. Основание стержня, соединенное с мембраной, выполняет роль жесткого центра. При этом из анализа формулы (1) следует, что величина чувствительности Gf. сильно зависит от диё1м ра стержня (т.е. от диаметра жестко центра). Зависимость бр от диаметра жестк го центра используется в предлагаемом механотронном преобразователе усилий следующим образом. Пока углы отклонения стержня от нейтрали I (фиг. 2) меньше предельного значения угла в пред соответствующего положению , то величина чувствительности данной кинематической системы ffp определяется диаметром жесткого центра, равного диаметру d стержня и имеет максимальный уровень. В положении наступает контакт стержня механотрона с трубкой 15 (фиг. 2) в точке N, лежащей на линии хх. (Линии хх и уу на фиг. 2 соответствуют образующим внутренней цилиндрической поверхности трубки 15). При дальнейшем отклонении стержня (в бпред) уровень чувствительности (эр резко снижается, так как роль жесткого центра мембраны начинает выполнять основание трубки 15, соединенное с поверхностью мембраны и имеющее диаметр От-(Фиг. 3) больший диаметр стержня d. Через оУ (на фиг. 2) обозначен изгиб поверхности мембраны при отклонений ст|ержня в положение |7 , а на фиг. 3 в положение )« Область углов отклонения стержня в пределахi 0пРеА,в которой чувстви тельность бр имеет максимальный уровень, зависит от величины зазора Ь (фиг. 1) стержнем механотрона и трубкой 15, а-также от длины . трубки. Очевидно, чем больше величина зазора Ь и чем короче:трубка 15, тем больше б пред. На фиг. 4 изображен конструктивный вариант механотронного преобразователя, в котором трубка 15 смещена относительно стержня механотрона таким образом, что зазор между ними . в одном из направлений отклонения стержня в 2 раза больше, чем в другом. При этом очевидно при перемещении стержня по стрелке F предельный угол 9пред будет, вдвое превышать значение 9 пред, соответствующее перемещению стержня по стрелке F, На фиг. 5 представлена конструкция механотронного преобразователя, трубка которого состоит из двух частей, одна из которых (15) припаяна к поверхности мембраны, а вторая (16) крепится на первой части посредством резьбового соединения. При навинчивании верхней части 16 трубки на ее нижнюю часть 15 общая длина трубки уменьшается, а область предельных углов отклонения (бпред ) расширяется. Механотронный преобразователь по предлагаемому изобретению обладает компактностью, универсальностью, простотой конструкции и удобством в эк сплуатации. Формула изобретения 1. Механотронный преобразователь, содержащий неподвижный электрод, жестко соединенный с вакуумированным баллоном, подвижный электрод, укрепленный на внутренней части управляющего стержня, который средне частью жестко соединен с мембраной, герметично соединенной с вакуумированным баллоном, отличающийся тем, что, с целью расширения диапазона измеряемых усилий, часть управляющего стержня, размещенная вне баллона, помещена внутрь введенной в преобразователь жесткой цилиндричесОой трубки, торец которой скреплен с поверхностью мембраны.
2. Преобразователь по.п. 1, отличающийся тем, что трубка расположена коаксиально стержню
:-- 10
3.Преобразователь по п. 1, отличающийся тем, что ось трубки смещена относительно продольной оси стержня в радиальном направлении.
4.Преобразователь по п. 1, о т л и ч а ю щ и и с я тем, что трубка
выполнена в виде двух частей, соединенных между собой с возможностью изменения общей длины.
to Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 235433, кл. Н 01 f 21/08, 11.07.66,
2.Авторское свидетельство СССР 15 №620803, кл. G 01 В 7/00, 25,06.76.
(а
иг.2
fui.lt
IS
IS
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкомпонентный силоизмерительный датчик | 1979 |
|
SU1046628A1 |
| Силоизмерительный датчик | 1976 |
|
SU662830A1 |
| Механотронный динамометр | 1978 |
|
SU1002855A1 |
| Механотронный преобразователь | 1990 |
|
SU1791732A1 |
| Аппарат для контактной сварки | 1974 |
|
SU519299A1 |
| Динамометр | 1981 |
|
SU1052892A1 |
| ГИДРОФИЗИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1987 |
|
SU1841084A1 |
| Механотронный преобразователь перемещений | 1976 |
|
SU620803A1 |
| Механотронный преобразователь линейных перемещений | 1991 |
|
SU1816961A1 |
| Моментомер | 1977 |
|
SU777502A1 |