Изобретение относится к измерительной технике, в частности к устройствам для измерений усилий, и может найти применение в машиностроении, приборо. строении, агрегатостроении, медицине, средствах технической диагнсктики сельхозмашин и других областях -народного хозяйства, Известны динамометры, содержащие упругую систему в виде призмы и механ тронный преобразователь деформации упругой системы С1 3 . Недостатком известного динамометра является нетехнологичность его KOHCIV рукции, а также неудовлетворительная точность измерений из-за гистерезиса упругой системы и влияния смещения то ки приложения усилия. Наиболее близким по технической сущности к изобретению является мометр, содержащий неподвижную и подвижную колодки, связанные между собой упругой сийтемой, и механотрон с мембраной, закрепленной своим корпусом в неподвк«ной колодке и связанный шты гем черээ плоскую прзокину с подвшкной колодкой 2,1 . Недостаток такого цинaмo 3eтpa состоит в низкой точности, обусловленной влиянием на результаты измераний сме- щеиия точки приложения измеряеьзого усилв:я, и низкой дш-гамической прочно сти упругой системы. Цель изобретения - повьпиение точности и динамической про шости. У1сазш1иая цель аост{1гается тем, что в цштамометре, соаерикашек-г непоцвиясную и поцви}кную колодки, свизаяные между собой упругой системой, и механотрон с мембраной, закрешленный своим ко| пусом в неподвижной колодке и связан ный тгырем naocKjio с понвияс ной кояодкой, упругая система Б1:.1поянен в вице трубчатого TeVia с BbipeaoM, обра зо0аппы л цилингфической поверхностью, продсшьння ось которой расположена в осевой плоскости трубчатого тела перпен дикулярно его оси и линии действий изм ряемо1Х5 усилия, а механотроп установле своей мемб загюй в плоскости, проходяпюй через ось симметрии секущей цилин рической поверхности. На фиг. 1 показано уст юйство, об ш,пй вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 paaii a на фиг. 1| на фиг. 4 « схемы нагружения и эпюр из- гибающих моментов от воздействия сило вых факторов. Дш-;амометр (фиг. 1 3) содербкит j,iipyi: yro систему 1, которая образована перес ечением трубчатого тела (в прос- рейщем случае цилиндрической трубки) с овальной цилиндрической поверз костью и связывает подвижиуто 2 и неподвижную 3 части трубчатого тела. В неподвижной 3 части трубчатого тепа укреплен корпус 4 механотрона посрец- сгвом кожуха 5, а его штырь 6 (внешняя часть управляющего стержня) проходит через отверстие в подвижной 2 части трубчатого тела и связан с последней посредством плоской пружины 7, втушси 8 и винтов 9 и 10. На внутренней части управляющего стержня укреплены подвижные аноцы механотрона, между которыми расположен его непод- вимшый .катод. Механотрон установлен в неподвижной колодке таким образом, что плоскость его мембраны 11 совпадает с плоскостью симметрии упругой системы 1, что необходимо для устранения погрешности измерений, вызыва- екюй продольным смещением точки...11йи ложения измеряемого усилия,, При этом мембрана механотрона располагается в плоскости, проходящей . ось секущей овальной (в частном случае круговой) цилиндрической поверхности. На фиг, 1 показана силоприемная площадка динамометра, расположенная на подвижной колодке 2 и имеющая длину d и щирину р. В реальных условиях нагружения измеряемое усилие F прикладыв.з,ется к различным точкам силоприемной площадки, имея возмож1гость смещаться, навеличину Ы в продольном Паправленик и на величину fb в поперечном нап1:)аБлении, причем за продольное напрешление пр1шято направлениз оси штыря механотрона. Параметры конструкции дт амометра быть выбраны таким образом, чтобы перемещение ЩТЫ1ЭЯ механотрона, вызва1 :ное указанными смещениями усилия, было минимальным. Воспользуемся известным приемом из теюретической механики и приложим условно к правому краю силоприемной площадки (фиг. 1) две противоположно направленные и равные друг другу силы ( В результате получим, что к с Н лоприемзюй площадке приложены два силовых фактора . усилие.F и момент А1., равный.. ,
гае ci- расстояние точки прилсжения усилия F от края силоприемной площадки в процольном направлении. В предельном случае вС -оС , а мсрмент Mgj равен
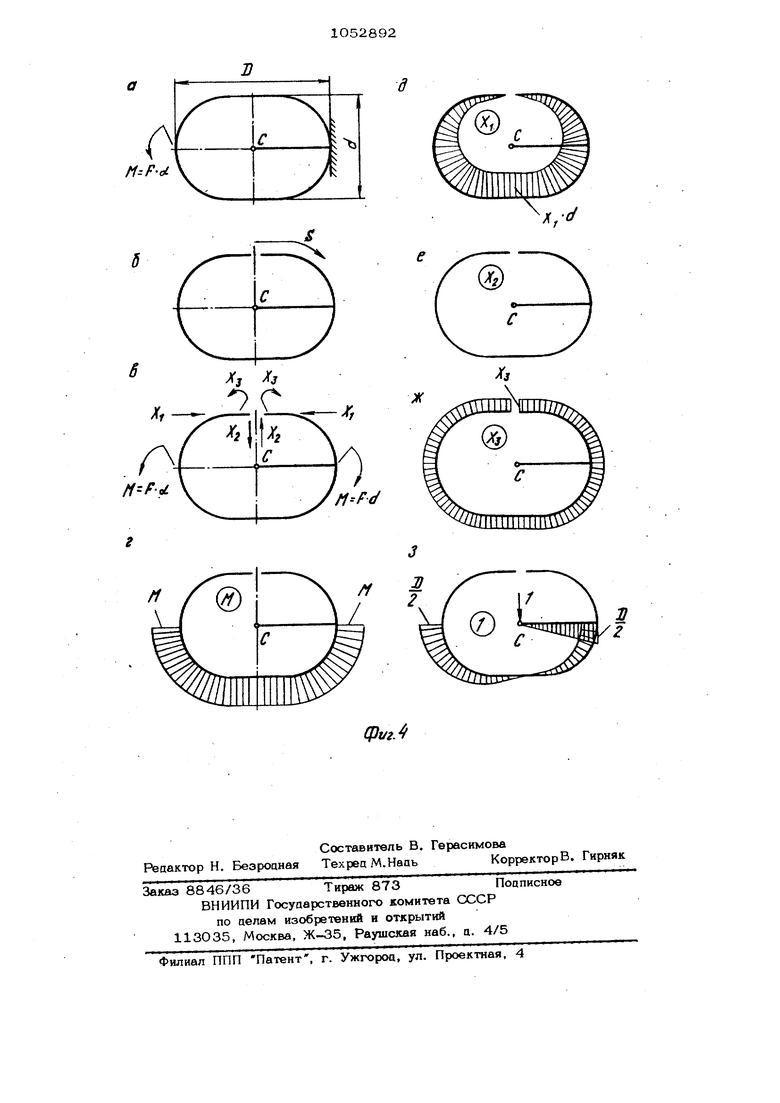
Таким образом, смешение точки приложения усилия в процольном направлении эквивалентно приложению К сило- ю приемной плошацке моментаМ. Смешение точки приложения усилия f в поперечном направлении, эквивалентно .приложению к силоприемной площадке момен .ts Оптимальный выбор размерных соот ношений параметров конструкции динамо.метра направлен на то, чтобы переме- 20 (х -шения и узштыря механотрона в на-||v правлении действия усилия. F от действия моментов Мс(,и Мр,были равны нулю. Этот выбор проводится в данном случае на основании результатов (эасчета, i cocTosnaero из двух этапов: определения перемещения штыря механотрона от смешения усилия F в пределах силоприемной площадки и установления оптимальных соотощений размерных параметров конструкции динамометра. Упрощенная схема нагружения консррукции динамометра моментом М F ci , возникающим, как было отмечено выше, . при смещении усилия F в пределах продольного размера оС силоприемной площадки динамометра, представлена на фиг. 4а. Конструкция динамометра может быть отнесена к трижды статически: неопределимым рамам и представляет собой овальное кольцо с больщой осью динамометра D и малой осью - d. Основная система имеет вид, представлен- ный на фиг. 45, а эквивалентная система - на фиг. 4в. Требуется определить в направлении силы F смещение f точки С внутренней консоли длиной D/2 под действием избигающего момента А1 Fo6 , С целью выявления соотношений м-эжау силовыми факторами, действующими в различных сечениях упругого тела, построены обобщенные эпюры от внешних н внутренних силовых факторов, представ- 55 ленные на фиг. 4г - ж. Кроме того, строим эпюру от единичного усилия, приложенного к точке С в направлении иско10528924
, .: мого перемещения (фиг. 4э). Перемещение fj определяется через интеграл Мора по замкнутому контуру цуги 5 овального кольца
М, , A1. ,
%)(х.|
, (1) (М)
ds+Ф.
ds +
oi-I гд рав М сил рич пер .ме мо нос Хг лы лаг чув сил сил лож та Л1/ . М, . )(э) (il (Аг) текущий момент инерции 3с по дуге упругого кольца; модуль упругости материала упругой системы 1 (фиг. l)j изгибающий момент от действий единичной силы (фиг. 4з); ) (У2) моменты в сечении кольца от внутренних силовых фактчэров: нормальной силы У., перерезывающей силы Л2 текушего изгибающего момента X,J текуший изгибаюший момент от внещнего момента M Fot (фиг. 4а). В формуле (1) круговые интегралы И|(Х,) %)м) dS, Фс 1)(Хз, cjg суть величины. ные нулю, так как эпюра момента J - кососимметричная, а эпюры от овых факторов М, Х и Х - симметные. 1)Х;г) Величина ф 0,так как ерезывающая сила .. ввиду симричности действия внешних изгибающих ентов М (фиг. 4в) и кососимметричти воздействия перерезывакнцей силы . Следовательно, правая часть форму(1) равна нулю ( f 0) и предаемая конструкция динамометра не ствительна к проаольному смещению ы. Поперечное смешение точки приложения ы на величину /э эквивалентно приению к силоприемной площадке момен( 1 Вслеаствие того, что конструкция 1аинамометра выполнена симметричной от носительно оси штыря механотрона, а момент ААл действует в плоскости, перьпенпикулярной к этой оси, очевиано, что вертикальный прогиб штыря 0. N Из этого следует, что оптимальным вариантом конструкции динамометра является цинамометр с расположением мембраны механотрона в плоскости, -прохоаящей через ось симметрии секущей овальной цилинцрической поверхности, которая может в частном случае быть поверошостью кругового цилиндра. Динамометр работает следующим образом. Измеряемое усилие Р, воздействуя на силоприемную площадку, вызывает смещение подвижной копоцки 2 динамометра относительно его неподвижной колодки 3 При этом штырь 6 механотрона, связанный с подвижной колодкой, перемещается что приводит к перемещению подвижных аноцов механотрона oтнocитeлыio его неподвижного катода. В результате этог юменяются токи анодов механотрона, причем это изменение анодных токов общеизвестным образом преобразуется в выходной электрический сигнал механо трона, пропорциональный измеряемому усилию F. Шкала отсчетного прибора измерительной схемы, в котопую включе
фиг. 2 Сриг.З 92 мехонотрон, тарируется непосредственно в единицах силы. Преимуществом предлагаемого динамометра является то, что упругая система конструкции имеет утолщение сечения в местах, примыкающих к колодкам 2 и 3, де возникают наибольшие изгибакнцие моменты от действия силовых факторов, Это приближает конструкцию упругой си- стемы к телу равного сопротивления действующим нагрузкам, что позволяет существенно снизить погрешность динамометра от гистерезиса упругой системы |И одновременно повысить циклическую динамическую) прочность конструкции при ее работе в условиях повышенных вибраций и ударов. Разрушение конструкций известных динамометров в указанных неблагоприятных условиях работы происходит в результате возникновения и развития усталостных трещин в местах сопряжения подвижной 2 и неподвижной 3 колодок с упругими элементами. В этих сопряжениях, кроме того, достигает мак- симума изгибающий момент, который в предлагаемой конструкции приложен к сечениям, имеющим существенно больший момент инерции, чем в известных. Использование динамометра позволяет вдвое снизить трудоемкость изготовления за счет технологичности и в 1,5 раза повысить точность измерения усилий. Х1
/
Л
6
УУ-/ч/
CpviA

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкомпонентный силоизмерительный датчик | 1979 |
|
SU1046628A1 |
| Механотронный динамометр | 1978 |
|
SU1002855A1 |
| Силоизмерительный датчик | 1976 |
|
SU662830A1 |
| Аппарат для контактной сварки | 1974 |
|
SU519299A1 |
| Механотронный преобразователь | 1979 |
|
SU821967A1 |
| Устройство для измерения усилий | 1976 |
|
SU555297A1 |
| Силоизмерительное устройство | 1986 |
|
SU1339415A1 |
| Измеритель крутящего момента | 1982 |
|
SU1049762A1 |
| Способ контроля усилия пружин в щеткодержателе | 1980 |
|
SU964818A1 |
| Устройство для контроля упругих и линейных характеристик пружин | 1983 |
|
SU1113688A1 |
ДИНАМОМЕТР, содержащий непоцвижную и подвижную колодки, связанные между собой упругой системой. и механотрон с мембраной, закрепленной своим корпусом в непоцвижной колодке и связанный штырем через плоскую пружину с подвижной колодксЛ, отличающийся тем, что, с целью повьпиения точности и динамической прочности, в нем упругая система выполнена в виде трубчатого тела с вырезом, образованным секущей цилиндрической поверкиостью, продольная ось которой расположена в осевой плоскости трубчатого тела перпендикулярно его оси и линии действия измеряемого усилителя, а механотрон установлен своей мембраной в плоскости, проходящей через ось с симметрии секущей цилиндрической по-S верхи ости. (Л СП 1С 00 со ю
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения усилий | 1976 |
|
SU555297A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механотронный динамометр | 1973 |
|
SU467244A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
