дгиощими и измерительными обмотками, источник переменного поля и электронный коммутатор, вход которого подключен к источнику переменного тока, а выход - к возбуждающим обмоткам магнитопровода. В качестве чувствительного элемента использованы измерительные обмотки, которые располагаются на намагничивающих магнитопроводах и подключены к дифференциальной измерительной схеме З .
Однако оно обладает низкой достоверностью контроля, так, как на показания индикатора сказываются магнитная связь магнитопроводов и непостоянство зазора между преобразователем и исследуемым изделием.
Известен также преобразователь, который содержит- феррозонд с продольным воэбузвдением, ферромагнитный сердечник П-образной формы, установленный внутри общей возбуждак«цей обмотки. измерительные обмотки выполнены в 34 раза короче сердечника и размещены на его концах 4 .
В результате применения общей намагничи.вакнцей обмотки чувствительность преобразователя к обнаружению внутренних напряжений уменьшается, а исследование остаточных напряжений невозможно, так как не обеспечивается одинаковая высокая чувствительность
к концентраторам напряжений и раэви вающимся усталостным трещинам мгшых размеров. Невозможна также одновременная регистрация сигнала в двух направлениях от концентратора механических напряжений и определение усталост ных.изменений материала, последовательно возникающих в наиболее напряженных участках, с регистрацией экстремумов от незначительных изменений составляющей индукции магнитного потока рассеяния.
Наиболее близким по технической сущности к изобретению является способ контроля ф11зйко-механических параметров ферромагнитншк: материалов,за клю1чающийся в том, что изделие намагничивают одновременно постоянным и
п1ере(июнным магнитными полямш и определяют амплитуду сигнала преобразователя, по которой судят о КОНТРОЛИруемом параметре |5 .
.Недостатком данного способа являв ся то,что для измерения коэЕ цитяв ной силы иеовходяма каждый раз nefjejci измерением компенсация до .нуля измеря емого магнитного поля,что не отвечлет (ютинным условиям измерения ко рцитйвиой силы. Кроме того, для осущес вления данного сгюсрба необходима система переменного яодмагничивания в виде катушки, что усложняет конструкцию и аппаратуру контроля, кроме того используется электромагнитный преобразователь в конструкции которого иэме{жтелькая не дает возможность проводить измерения напряжений, измерять магнитную анизотрпию, направление действия напряжений Невозможно осуществлять непрерывный контроль вертикальных и труднодоступных потолочных конструкций в течение длительного времени без съема преобразователя.
Способ также не позволяет измерит локально остаточные на пряжения, определить наличие концентраторов напряжений, приводящих к усталостной повреждаемости в структуре материала, не Обеспечивает необходимой надежности и достоверности контроля при статическом и динамическом нагружении, не чувствителен к изменению внутренних напряжений и обладает слабой разрешающей способностью к изменению коэрцитивной силы.
Наиболее близким по технической л сущности к изобретению является преобразователь, содержшций цилиндрический осесимметричный постоянный магни и расположенный по оси магнита магниточувствительный элемент б .
Однако известный преобразователь обладает низкой достоверностью контроля, так как на показания индикатора существенное влияние будет оказывать магнитная связь магнитопроводов и зазор, между преобразователем и исследуемым материалом.
Цель изобретения - повышение надежности и достоверности контроля пр статическом и динамическом нагружении.
Поставленная цедь достигается тем что с помощью электромагнитного преобразователя с осесимметричным постоянным цилиндрическим магнитом по максимуму амплитуды его сигнала, пропорциональной нормальной составляюще индукции магнитного потока рассеяния определяют зону концентрации напряжений или зону с развивакхдейся усталостной трещиной, сканируют преобра.зователем поверхность материала вокру.г определенной зоны, строят зависимость изменения амплитуды сигнала преобразователя в радиальных направлениях от зоны концентрации напряжений и йо полученной зависимости судят о величине и направлении напряжений, стадиях усталостной повре кдаемости и оставшемся ресурсе.
А в преобразователе для осуществления способа магниточувствительный элемент установлен с возможностью перемещения вдоль оси магнита и выполнен в виде не менее чем двух феррозондов-градиентог ютров с П-образными сердечниками, каждый из которых расположен симметрично относительно оси магнита, а высота боковых ветвей сердечников феррозонда-градиентометра и внутренний диаметр цилиндрического канала магнита выбраны из соотношения 1:3, возбуждающие обмотки феррозонда-градиентомегра распрэелены вдоль боковы: ветвей сердечников, а измерительные обмотки расположены на концах ветвей и выполнены в 5-6 раз короче возбуждающих бмоток. Кроме того, преобразователь снабжен магнитной фокусирующей сисемой, выполненной в виде стакана из агнитомягкого материала, охватываюего постоянный магнит и имеющего тверстие в области расположения ферозондов-градиентометров.
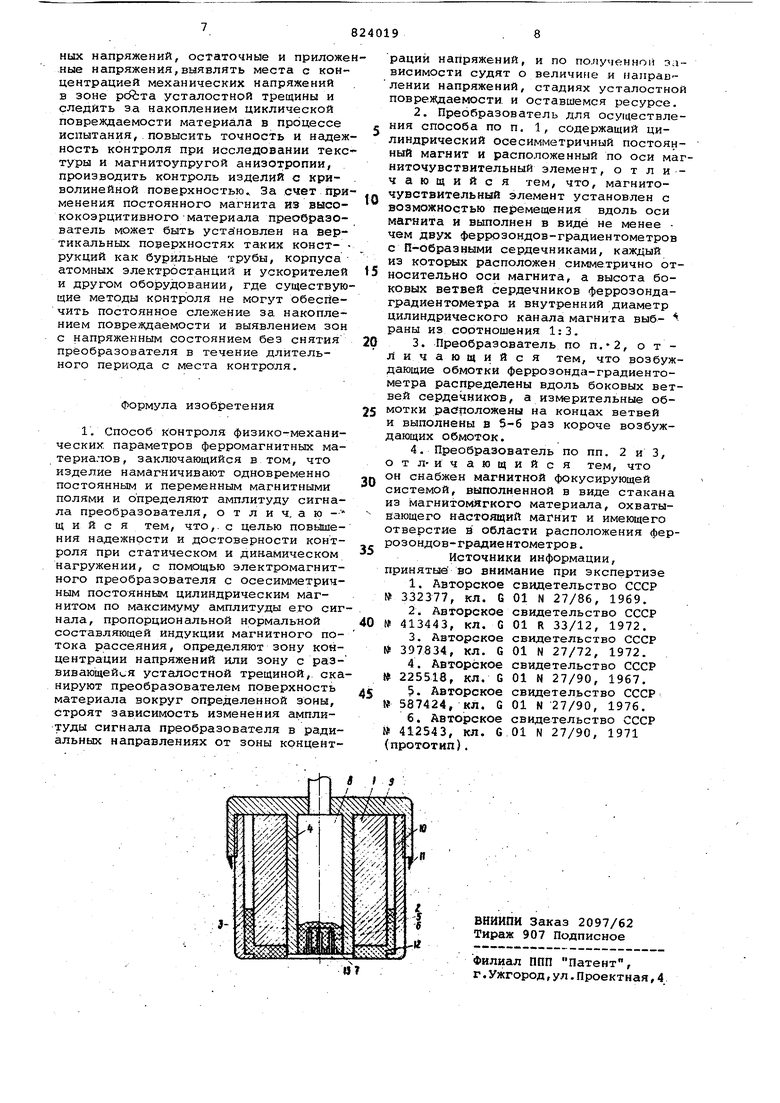
На чертеже представлен преобразователь для осуществления способа.
Преобразователь содержит цилиндрический осесимметричный пострянный магнит 1 и расположенный по оси магнита с возможностью перемещения вдоль нее. магниточувствительный элемент, выполненный в виде не менее чем двух феррозондов-градиентометров с П-образными сердечниками 2 и 3, каждый из которых расположен симметрично относительно оси магнита 1.
Высота боковых стержней сердечников и внутренний диаметр цилиндрического канала 4 магнита 1 выбраны из соотношения 1:3.
Возбуждающие обмотки 5 каждого феррозонда-градиентометра распределены вдоль боковых ветвей 6 П-образных сердечников, а измерительные обмотки 7 размещены на концах ветвей и выполнены в 5-6 раз короче возбуждающих обмоток.
ФеррЬзонды-градиентометры с помощью держателя 8 закреплены внутри каркаса 9, ориентированного относительно цилиндрического канала 4 постоянного магнита 1.Ориентация производится при настройке таким образом, что продольная ось симметрии П-образных сердечников совпадает с осью симметрии магнита 1. Каркас 9 выполнен с возможностью возвратно-поступательного перемещения по отношению к, магниту 1 счастотой,обратно пропорциональной скорости сканирования. Корпус 10 преобразователя выполнен с градусной шкалой, а каркас 9 - со стрелочным индикатором 11.
Преобразователь позволяет в преде лгис точности градусной шкалы отмечать на контролируемом изделии маправлеше линий действия главт напряжении по максимуму сигиала с измерительных обмоток феррозондов-градиентом тров.
В случае контроля криволинейных поверхностей на постоянный магнит 1 устанавливается магнитная фокусир)пощая система 12 в виде стакана из магнитомягкого материала, имеющая отверстие 13 в области расположения феррозондов. Область между корпусом и магнитом 1 заполнена жидким гелием или азотом.
Способ осуществляется следующим образом.
В начальный момент преобразователь устанавливается так, что одна пара феррозондов ориентирована своими ветвями по градусной шкале на нуль. Преобразователь устанавливают на контролируемую поверхность ферромагнитного материала таким образом, что перед началом проведения измерений феррозонды находятся в нейтральной точке (в рабочем объеме) цилиндрического канала 4 постоянного магнита. Это достиoгается регулировкой каркаса 9 с феррозондами относительно магнита 1 вдоль его оси. Показания на индикаторе 11 измерительного прибора при этом близки к нулю.
5
Переменное магнитное поле создается поочередно через электронный коммутатор {не показан) П-образными сердечниками 2 и 3 феррозондов-гр.адиенЮметров с возбузвдакмцими обмотками 5,
0 которые пита10тся переменным током звуковой частоты. Переменное магнитное поле направлено под углом «. 90° к постоянному магнитному полю.
Постоянное магнитное поле создается сверхпроводящим осесимметричным
5 постоянным магнитом 1 и направлено . под углом-jf и 45° к контролируемому изделию. Взаимодействие зтцх двух полей в объеме сердечников с продольным возбуждением приводит к появлению в
0 измерительных обмотках 7 ЭДС сигнала второй- гармоники, по величине которой судят об изменении индукции магнитного потока рассеяния.
Электронный коммутатор переключа5ется на ту пару феррозондов, ветви которых ориентированы на нуль градусной шкалы. Затем он отключает намагничивающие обмотки первой пары и подключает вторую пару феррозондов. Сиг0нал на измерительный прибор теперь поступает со второй пара,расположенной под углом 90° к первой. Таким образом, измеряется амплитуда сигнала в двух направлениях.
При обнаружении зоны с концентра5цией механических напряжений по максимуму гмплнтуды сигнала, начинают сканировать поверхность материала вдоль радиальных направлений по заданной функции от зоны концентрации
O напряжений или места развития усталостной повреждаемости.
Строят зависимость амплитуды сигнала от координат перемещения преобразователя. По пoJiyчeннoй зависимос5ти строят эпюру распределения внутренних напряжений, по которой судят о величине и направлении напряжений, а также о процессе накопления усталостной повреждаемости в материале изделия. По максимумам или минимумам сиг0налов определяют стадии усталостной повреждаемости и оставшийся ресурс.
Способ и преобразователь для его осуществления позволяют определять величину и направление действия глав