f
Изобретение относится к автоматике и может быть использовано в устройствах программного управления, а также в.системах передачи сигналов.
Известны устройства для дискретного задания углов, содержащие электрическую шкалу (двухобмоточный многополюсный вращающийся трансформатор) и исполнительный двигатель, кинематически связанный с задакадйм валом и ротором электрической шкалы и электрически подключенный через усилитель к выходной обмотке статора электрической шкапы 1 . и 2 .
Наиболее близким к предлагаемому техническим решением является устройство, ссдержащее электрическую Шкалу с зубчатым магнитопроводом ротора и статора, на которых размещены входная и выходная многополюсные обмотки, исполнительный двигатель, кинематически связанный с задающим валом и роторо.м и электрически подключенный через усилитель и переключатель к выходной обмотке статора
Сз.
Недостатками известных устройств являются неудобство установки и считывания задаваемых углом и невозможность автоматизации работы извест.ных
устройств в составе контрольно-испытательной аппаратуры.
Цель изобретения - повышение точности и расширение функциональных возможностей устройства для дискретного задания углов поворота вала. .
Поставленная цель достигается тем, что в устройство для дискретного задания углов поворогга вала, со0держащее электрическую шкалу с зубчатыми магнитопроводами ротора и статора, на которых размещены соответственно входная и выходная многополюсные обмотки, исполнительный
5 двигатель, кинематически связанный с задающим валом и соединенный через усилитель со входом переключателя, источник переменного напряжения, соединенный с первым выходом переключа0теля и со входной обмоткой электрической шкалы, введены синхронные детекторы, выпрямители, индикаторные лампы старших и младших разрядов, делитель напряжения, сумматор и ин5дуктивный датчик угла поворота вала, который установлен на задаквдем вале, вход индуктивного датчика угла поворота соединен с источником переменного напряжения, выходы младших разрядов индуктивного датчика угла поворота вала соединены с первыми входами синхронных детекторов, а выходы старших разрядов индуктивного датчика угла поворота вала через выпрямители - с индикаторными лампами старших разрядов, вторые входы синхронных детекторов соединены с источником переменного напряжения, а выходы - с индикаторной лампой младшего разряда, вход делителя напряжения соединен с источником переменного .напряжения, а выход - с первым входом сумматора , второй вход которого соединен с выходной обмоткой электрической шкалы, а выход - со вторым выходом переключателя.
Кроме того, индуктивный датчик угла поворота вала выполнен в виде статора с зубчатым магнитопроводом и ротора с магнитопроводом, на котором два зубца, шаг зубцов ротора и статора равен шагу зубцов зубчатых магнитопроводов ротора и статора электрической шкалы, на каждом зубце статора размещены первые обмотки, выводы которых соединены с выходами младших разрядов индуктивного датчика угла поворота вала, вторые обмотки размещены на группах зубцов статора в которых число зубцов на один зубец меньше номера соответствующего старшего разряда, выводы вторых обмоток соединены выходами старших разрядов индуктивного датчика угла повсфота вала, на роторе расположена входная обмотка, которая соединена со входом индуктивного датчика угла поворота вала.
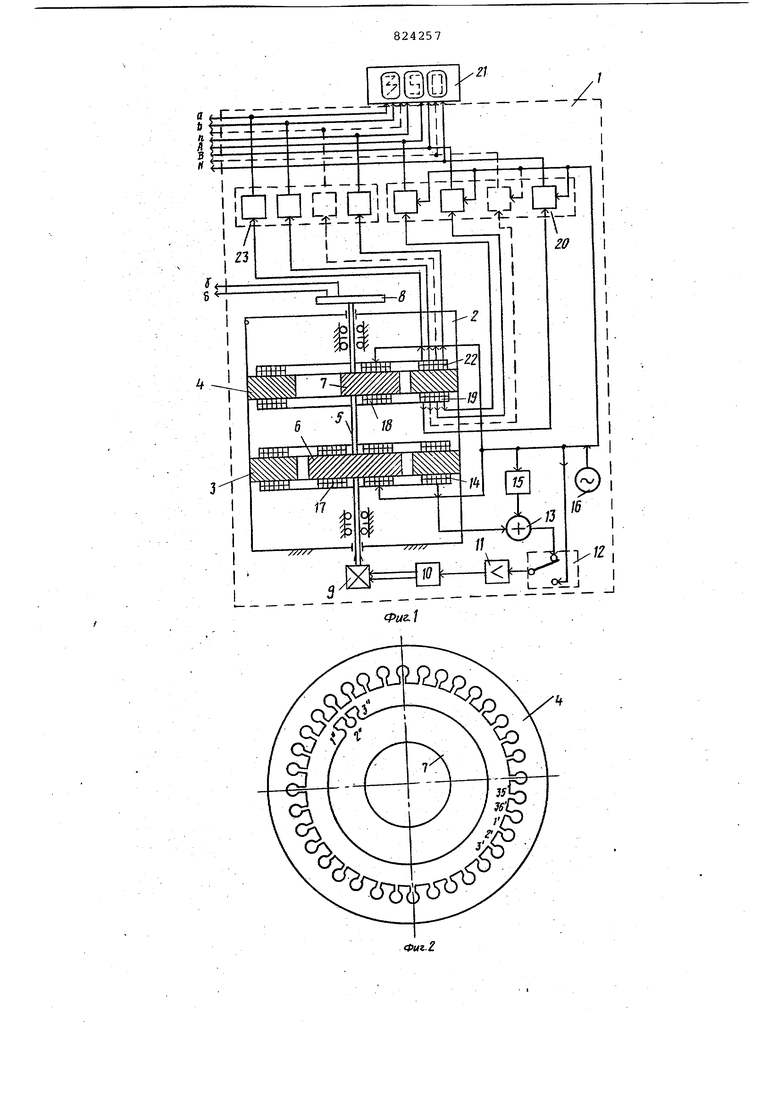
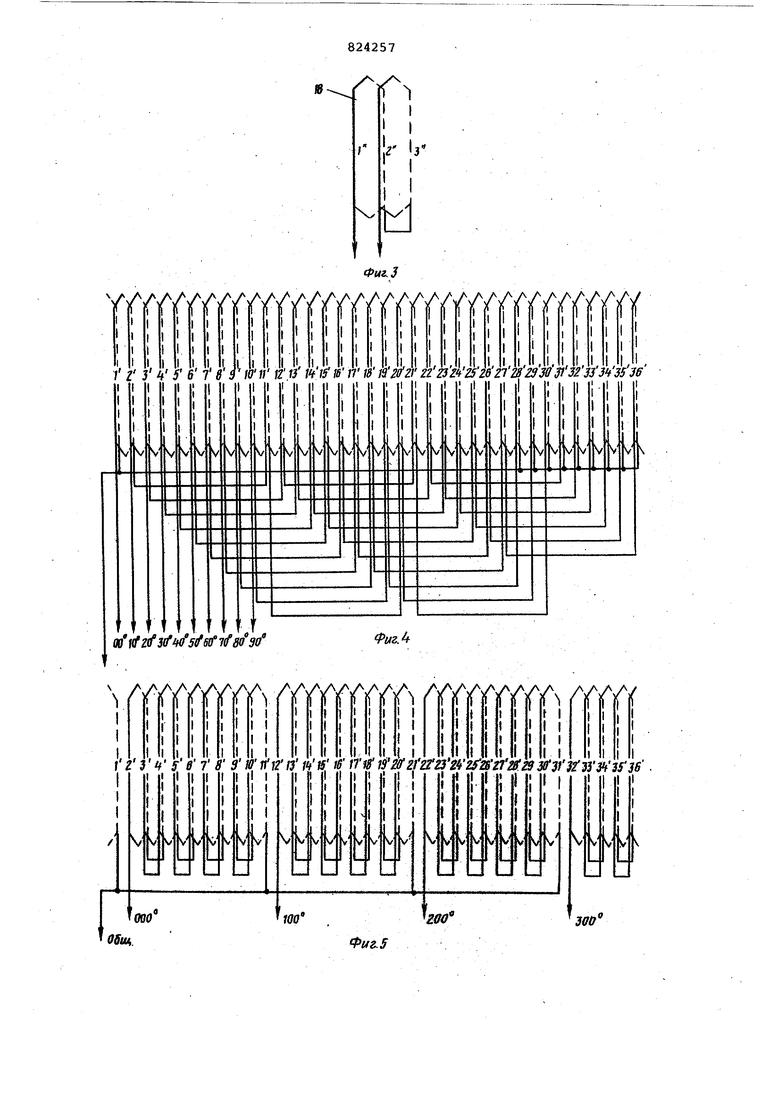
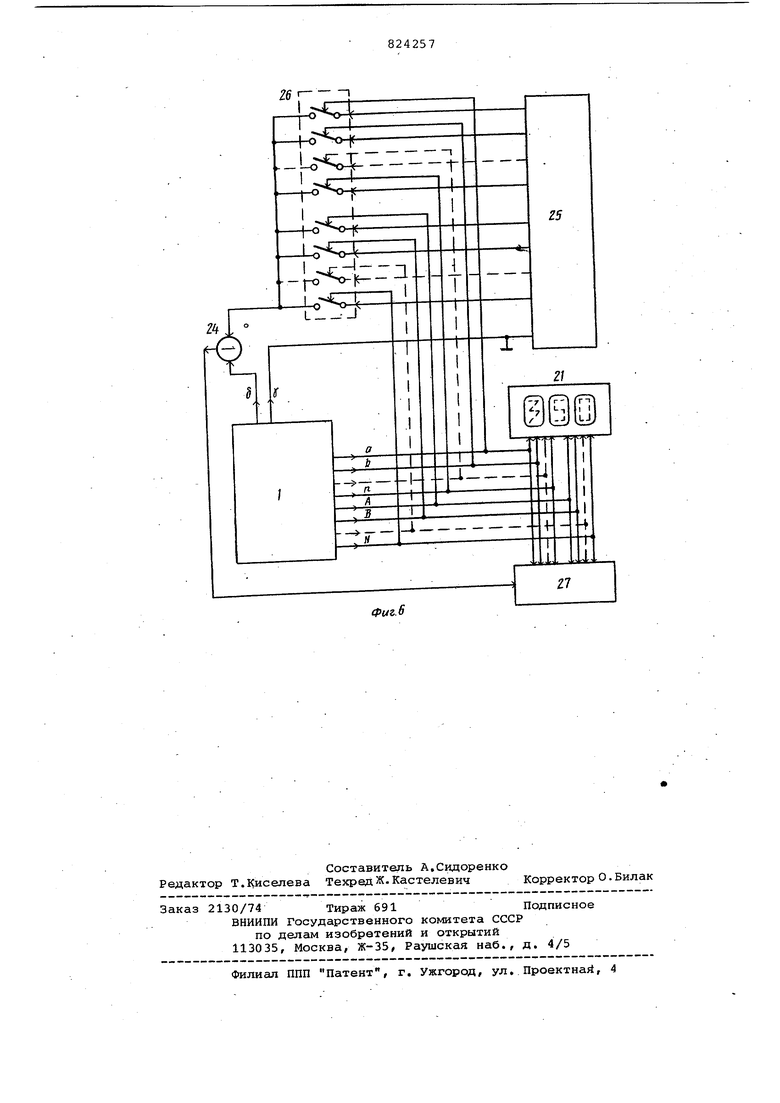
На фиг. 1 изображено устройство для дискретного задания углов; на фиг. 2 - магнитопроводы введенных в устройство второго ротора и второго статора; на фиг. 3 - схема входной обмотки, помещенной на втором роторе; на фиг. 4 - схема, помещеннрй на втором статоре выходной обмотки, обе печивающей индикацию единиц младшего разряда; на фиг. 5 - то же, обеспечивающей индикацию единиц старших разрядов; на фиг. б - схема практического использования предлагаемого устройства.
Устройство для дискретного задания углов 1 (фиг. 1) включает в себя жестко связанные с корпусом 2, идентичные зубчатые магнитопроводы статора 3 электрической шкалы и второго статсфа 4, а также установленный в подшипниках корпуса 2 задающий вал 5 связанный с зубчатым магнитопроводом paiopa б электрической шкалы, с магнтопровсяом jBTOporb ротора 7, с ротором проверяемого изделия 8 и через редуктор 9 - с исполнительным двигателем 10. Исполнительный двигатель 10 через усилитель 11 и переключатель 12 электрически связан с выходом сумматора 13, один из входов которого подключен к многопояюсной выходной обмотке 14, расположенной в пазах магнитопровода статора 3 электрической шкалы, а второй вход через делитель 15 напряжения подключен к источнику 16 переменного напряжения. Источник 16 напряжения соединен с многополюсной входной обмоткой 17, расположенной в пазах магнитопровода ротора б электрической шкалы, и с двухполюсной входной обмоткой 18 (фиг. 3), расположенной на двух зубцах магнитопровода второго ротора 7, причем шаг зубцов магнитопровода ротора 7 равен шагу зубцов магнитопроводов ротора б и статоров 3 и 4. Расположенные в пазах магнитопровода второго статора 4 выходные обмотки 1 (фиг. 4) электрически соединены с первыми входами синхронных детекторов 20 (фиг. 1), вторые входы которых соединены с источником 16 переменного напряжения, а выходы подключены к индикаторной лампе младшего разряда блока 21 индикаторных ламп, ааходные обмотки 22 (фиг, 5), также расположенные в пазах магнитопровода второго статора 4, электрически соединены со входами выпрямителей 23 (фкг. 1), выходы которых подключены к индикаторным лампам старших разрядов блока 21 индикаторных ламп.
При питании многополюсной входной обмотки 17, расположенной в пазах ротора б электрической шкалы, переменным напряжением от источника 16 (фиг. 1 ) на клеммах многополюсной выходной обмотки 14, расположенной в пазах статора 3 электрической шкалы, возникает сигнал рассогласования пропорциональный углу iX. поворота ротора б. Сигнал, усиленный усилителем 11 поступает на обмотку управления исполнительного двигателя 10, который разворачивает задающий вал 5 до ближайшего устойчивого положения,при котором сигнал рассогласования равен нулю. Предельное число устойчивых положений задающего вала 5 равно числу зубцов п магнитопровода ротора (статора) электрической шкалы. Таким образом, задающий вал 5 в пределах одного оборота может занимать п устойчивых положений и, следовательно, дискретность у задания углов определяется числом зубцов ротора (статора), электрической шкалы
,..
Для установки задгиощего вала 5 в требуемое устойчивое положение пре.дусмотрена (на момент размыкания крнтактов переключателя 12) подача на обмотку управления исполнительного двигателя 10 напряжения от источника 16 (фиг. 1).
С целью обеспечения индикации устaнaвливae « IX углов и для автоматизации работы устройства в него введены второй ротор 7 и второй статор 4, причем магнитопровод статора 4 установлен идентично магнитопроводу статора 3, а магнитопровод ротора 7 развернут относительно магнитопрово да ротора 6 на угол . : А т.е. на половину шага зубцов (которы :Одинаков для магнитопроводов всех статоров и роторов установленных в устройстве). Благодаря тому, что магнитопровод ротора 7 развернут относительно магнитопровода ротора б на угол tp в каж дом устойчивом положении задающего вала 5 два зубца ротора 7 взаимодействуют с двумя соответствующими зубцами статора 4 (фиг. 2). Таким образом, при питании двухполюсной входной обмотки 18 (фиг. 3) расположенной на зубцах магнитопровода ротора 7, переменным напряжением от источника 16 (фиг. 1) в витках выходных обмоток 19 и 22 (фиг. 4, 5), охватывающих два зубца статора 4,-взаимодействующие в данном устойчивом поло жении задающего вала 5 с зубцами ротора 7, возникает ЭДС. Так как задаю щий вал 5 имеет число устойчивых положений п, то для обеспечения дискретности индикации, равной f , каждое последующее положение вала 5 должно отличаться от предыдущего на единицу младшегб разряда. Это доститается тем, что выходная обмотка 19 (фиг. 4) выполнена в виде ряда обмоток, каждая из которых охватывает один зубец статора 4 и служит для индикации единицы младшего разряда. Однако в каждом устойчивом положении задающего вала 5 в витках этих обмо.ток наводятся ЭДС, равные по величине, но отличающиеся по фазе на 180°, поэтому для обеспечения необходимой дискретности индикации информация об угловом положении задающего вала 5 снимается с витков той из обмоток 19 ЭДС которой- совпадает по фазе с опор ным сигналом. С этой целью каждая из самостоятельных обмоток 19 подсоединена к синхронному детектору 20 (фиг. 1). Для уменьшения числа выводов выходной обмотки 19, отдельнь1е обмотки, определякяцие одноименные единицы младшего разряда, соединены между собой последовательно (фиг.4). Так как число зубцов магнитопроводов статоров 3 и 4, как правило, больше числа единиц младшего разряда принятой системы счисления, то для обеспечения однозначности индикации в пазах второго статора 4 располагается выходная обмотка 22(фиг, 5), обеспечивающая индикацию единиц старших разрядов. Выходная обмотка 22 представляет собой несколько самостоятельных обмоток, каждая из которых охватывает число зубцов статора 4 на один зубец меньшее единицы соответствующего старшего разряда. Такая конструкция обмоток 22 позволяет исключить ошибку считывания на границе двух обмоток, каждая из которых обеспечивает индикацию единицы старшего разряда. Каждая из обмоток 22 соединена с выпрямителем 23. Включение синхронных детекторов 20 и выпрямителей 23 необходимо.для выработки напряжения, управлякадего усилителями, обеспечивающими работу индикаторных ламп (усилители и индикаторные лампы входят в состав блока 21 индикации). Для повышения точности предлагаемого устройства в него введен сумматор 13, который служит для компенсации постоянной составляющей сигнала, снимаемого с выходной обмотки 14 электрической шкалы. Эта составляющая может появиться, например, из-за наводок от цепей питания входных обмоток, расположенных на роторах 6 и 7. Компенсация постоянной составляющей производится путем подачи на второй вход сумматора через делитель 15 напряжения от источника 16, причем компенсирующий сигнал должен быть равен по величине и противоположен по фазе постоянной составляющей выходного сигнала обмотки 14. На фиг.6 дан пример практического использования предлагаемого устройства для дискретного задания углов. Предлагаемое устройство позволяет развернуть ротор проверяемого прибора 8 (например, СКВТ фиг. 1), кинематически связанного с задающим валом 5, на некоторый угол, соответствующий одному из устойчивых положений задающего вала 5. Информация 6 величине заданного угла поступает на блок 21 индикации, и кроме того, на переключающее устройство 26 и на регистрирукйцее устройство 27. Сигналы, поступающие на переключающее устройство 26, управляют ключами таким образом, что на выход переклю- чающего устройства 26 с эталонного синусного делителя 25 напряжения поступает сигнал, служащий эталоном для сравнения с выходным напряжением проверяемого СКВТ. В каждом устойчивом положении задающего вала 5 сигнал, снимаемый с выходной обмотки проверяемого прибора 8, сравнивается в устройстве 24 сравнения (фиг. 6) с эталонным сигналом, и результат сравнения, являюи ийся погрешностью СКВТ поступает на регистрирующее устройство 27. Таким образом, предложенное устройство для дискретного задания углов позволяет осуществить дистанионную индикацию задаваемых углов, и, кроме того, вырабатывает сигналы
лпя автоматизации его работы в составе контрольно-испытательной аппаратуры.
Формула изобретения
1, Устройство для дискретного заания углов поворота вала, содержаее электрическую шкалу с зубчатыми агнитопроводами ротора и статора, на которых размещены соответственно входная и выходная обмотки, исполнительный двигатель, кинематически связанный с задающим валом и соединенный через усилитель со входом перёключателя, источник переменного напряжения, соединенный с первым выходом переключателя и со входной обмоткой электрической шкалы, отличающееся тем, что, с целью повышения точности и расширения Функциональных возможностей устройства, в него введены синхронные детекторы, выпрямители, индикаторные лампы старших и младших разрядов, делитель напряжения, сумматор и индуктивный датчик угла поворота вала, который установлен на входном валу, вход индуктивного датчика угла поворота вала соединен с источником переменного напряжения, выходы младших разрядов индуктивного датчика угла поворота вала соединены с первыми входами синхронных детекторов, а выходы старших разрядов индуктивного датчика угла поворота вала через выпрямители - с индикаторными лампами старших разрядов, вторые входы синхронных детекторов соединены с источником переменного напряжения, а выходы - с индикаторной лампой младшего разряда, вход делителя напряжения соединен с источником переменного напряжения, а выход - с первым входом сумматора, второй вход которого соединен с выходной обмоткой электрической шкалы, а выход - со вторым выходом переключателя.
2.Устройство по п. 1, отличающееся тем, что индуктивный датчик угла поворота вала выполнен в виде статора с зубчатым магнитопроводом и ротора из магнитопровода с двумя зубцами, шаг зубцов ротора и статора равен шагу зубцов зубчатых магнитопроводов ротора и статора электрической шкалы, на каждом зубце статора размещены первые обмотки, выводы которых соединены с выходами младших разрядов индуктивного датчика угла поворота вала, вторые обмотки размещены на группах зубцов статора, в которых число зубцов на один зубец меньше номера соответствующего старшего разряда, выводы вторых обмоток соединены выходами старших разрядов индуктивного датчика угла поворота вала, на роторе расположена входная обмотка, колгорая соединена со входом индуктив-г. ного датчика угла поворота вала.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 421021, кл. G 08 С 9/04, 1972,
2. Авторское свидетельство СССР № 525996, кл. G 08 С 25/00,01.04.74
3.Авторское свидетельство СССР № 195224, кл. G Об G 7/02, 1966 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многополюсный вращающийся трансформатор | 1980 |
|
SU871285A1 |
| Преобразователь угол-фаза | 1977 |
|
SU708141A1 |
| Преобразователь угол-фаза | 1977 |
|
SU734506A1 |
| Многополюсный вращающийсяТРАНСфОРМАТОР | 1979 |
|
SU799084A1 |
| Индукционный датчик угла | 1974 |
|
SU521636A1 |
| Многополюсный вращающийся трансформатор | 1982 |
|
SU1065978A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Многополюсный вращающийся трансформатор | 1980 |
|
SU898565A2 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для проверки решающих электрических машин | 1978 |
|
SU736156A1 |
OStu,,
,
I I
|r U
Фиг. 5
