(54) ТЕЛЕСКОПИЧЕСКИЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1997 |
|
RU2130888C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279391C1 |
| Устройство для промежуточной разгрузки ленточного конвейера | 1988 |
|
SU1555247A1 |
| Телескоп кассетный ленточный | 2024 |
|
RU2828312C1 |
| БРЕМСБЕРГОВЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2281899C1 |
| БРЕМСБЕРГОВЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279387C1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279388C1 |
| ВЕРТИКАЛЬНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2007 |
|
RU2352510C1 |
| ТЕЛЕСКОПИЧЕСКИЙ КОНВЕЙЕР | 2002 |
|
RU2213684C1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к телескопическим ленточным конвейерам.
Известен телескопический ленточный конвейер, содержащий подвижный и неподвижный ставы, на которых укреплены ролики, поддерживающие ленту. .Подвижный став выполнен в виде двух секций, одна из которых состоит из , расположенной на закрепленных на неподвижном ставе направляющих, на которых. расположена закрепленная к неподвижному ставу тележка 1J.
Однако конвейер такой конструкции сложен. Для его сдвижки и раздвижки требуется множество элементов, которые при эксплуатации изнашиваются и требуют тщательного ухода.
Известен также телескопический ленточный конвейер, содержащий неподвижную и подвижную рамы с закрепленными на них барабанами, огибаемыми лентой, с грузонесущей и холостой ветвя.ми к механизм, компенсирующий, длину ленты 2.
Однако данный конвейер имеет ряд существенных недостатков. Неподвижная и
подвижная рамы входит одна в другую. Для взаимного перемещения их нужны большие силы и точность использования рам, в противном случаЬ перекос рам вызывает заклинивание. Отдельные слои лент при 5 наматывании ее на пару роликов, проскальзывают относительно друг друга, так как опоры роликов приклеплены на неподвил ной раме и лента с этой стороны неподвижна Наличие жесткого каркаса и сцепной муфты усложняет конструкцию самого конвейера, а также и условия эксплуатации, увелияивает металлоемкость при изготовлении конвейера.
Цель изобретения - упрощение конструк7 ции конвейера и повышение удобства в экс5 плуатации.
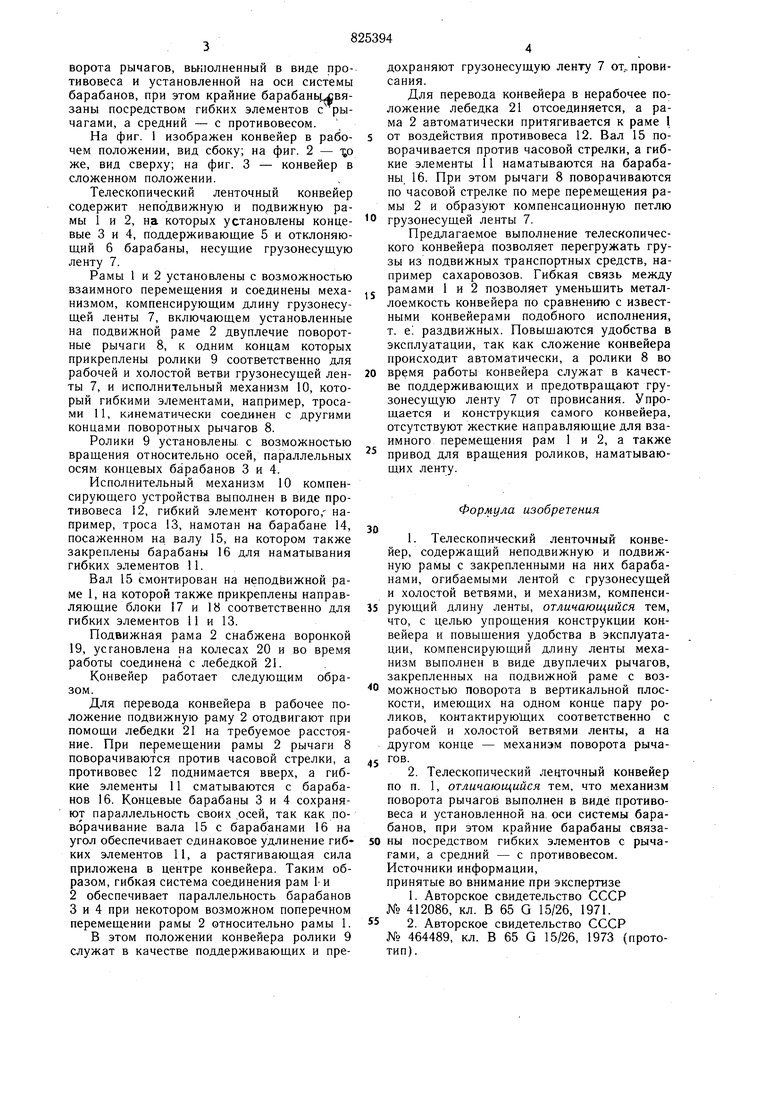
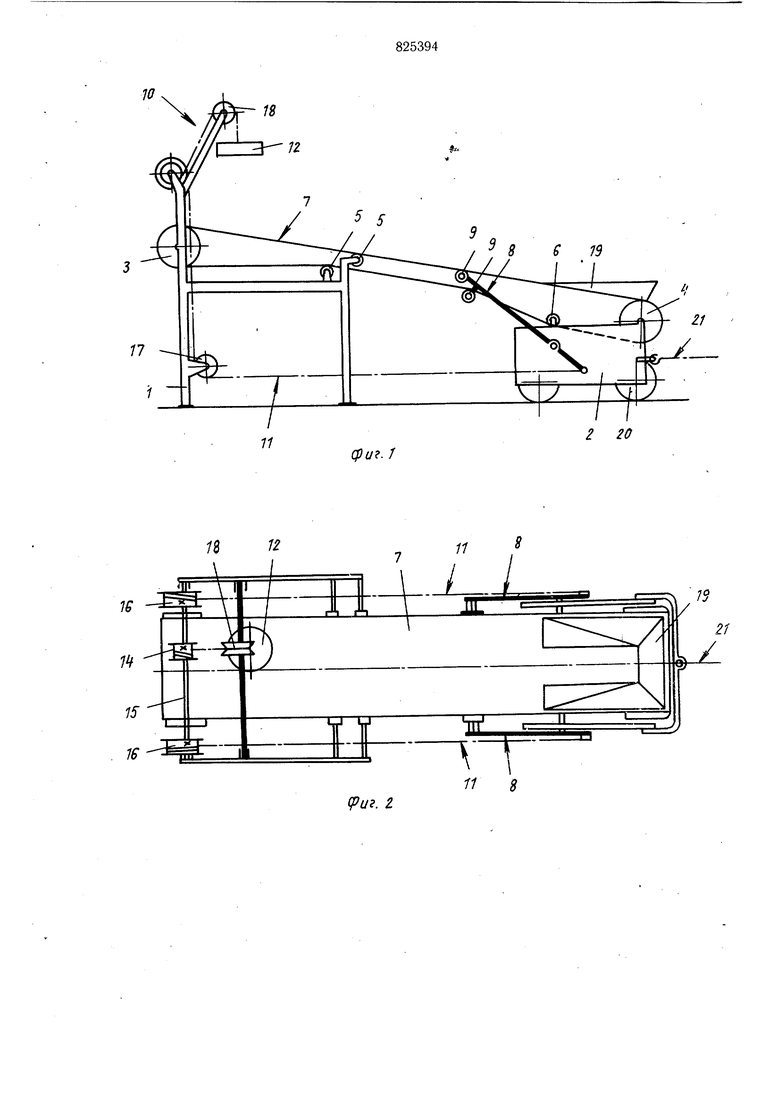
Указанная цель достигается тем, что в предлагаемом конвейере компенсирующий длину ленты механизм выполнен в виде двуплечих -рычагов, закрепленных на под,вижной раме с возможностью поворота в вертикальной. плоскости, имеющих на .одном конце пару -роликов, контактирующих соответственно с рабочей и холостой ветвями ленты, а на другом конце - механизм поворота рычагов, выполненный в виде противовеса и установленной на оси системы барабанов, при этом крайние барабаньг вязаны посредством гибких элементов с рычагами, а средний - с противовесом. На фиг. 1 изображен конвейер в рабочем положении, вид сбоку; на фиг. 2 - же, вид сверху; на фиг. 3 - конвейер в сложенном положении. Телескопический ленточный конвейер содержит неподвижную и подвижную рамы 1 и 2, на которых установлены концевые 3 и 4, поддерживающие 5 и отклоняющий 6 барабаны, несущие грузонесущую ленту 7. Рамы 1 и 2 установлены с возможностью взаимного перемещения и соединены механизмом, компенсирующим длину грузонесущей ленты 7, включающем установленные на подвижной раме 2 двуплечие поворотные рычаги 8, к одним концам которых прикреплены ролики 9 соответственно для рабочей и холостой ветви грузонесущей ленты 7, и исполнительный механизм 10, который гибкими элементами, например, тросами 11, кинематически соединен с другими концами поворотных рычагов 8. Ролики 9 установлены, с возможностью вращения относительно осей, параллельных осям концевых барабанов 3 и 4. Исполнительный механизм 10 компенсирующего устройства выполнен в виде противовеса 12, гибкий элемент которого,- например, троса 13, намотан на барабане 14, посаженном на валу 15, на котором также закреплены барабаны 16 для наматывания гибких элементов 11. Вал 15 смонтирован на неподвижной раме 1, на которой также прикреплены направляющие блоки 17 и 18 соответственно для гибких элементов 11 и 13. Подвижная рама 2 снабжена воронкой 19, установлена на колесах 20 и во время работы соединена с лебедкой 21. Конвейер работает следующим образом. Для перевода конвейера в рабочее положение подвижную раму 2 отодвигают при помощи лебедки 21 на требуемое расстояние. При перемещении рамы 2 рычаги 8 поворачиваются против часовой стрелки, а противовес 12 поднимается вверх, а гибкие элементы 11 сматываются с барабанов 16. Концевые барабаны 3 и 4 сохраняют параллельность своих .осей, так как поворачивание вала 15 с барабанами 16 на угол обеспечивает одинаковое удлинение гибких элементов 11, а растягивающая сила приложена в центре конвейера. Таким образом, гибкая система соединения рам и 2обеспечивает параллельность барабанов 3и 4 при некотором возможном поперечном перемещении рамы 2 относительно рамы 1. В этом положений конвейера ролики 9 служат в качестве поддерживающих и предохраняют грузонесущую ленту 7 от, провисания. Для перевода конвейера в нерабочее положение лебедка 21 отсоединяется, а рама 2 автоматически притягивается к раме I от воздействия противовеса 12. Вал 15 поворачивается против часовой стрелки, а гибкие элементы 11 наматываются на барабаны, 16. При этом рычаги 8 поворачиваются по часовой стрелке по мере перемещения рамы 2 и образуют компенсационную петлю грузонесущей ленты 7. Предлагаемое выполнение телескопического конвейера позволяет перегружать грузы из подвижных транспортных средств, например сахаровозов. Гибкая связь между рамами 1 и 2 позволяет уменьщить металлоемкость конвейера по сравнению с известными конвейерами подобного исполнения, т. е . раздвижных. Повыщаются удобства в эксплуатации, так как сложение конвейера происходит автоматически, а ролики 8 во время работы конвейера служат в качестве поддерживающих и предотвращают грузонесущую ленту 7 от провисания. Упрощается и конструкция самого конвейера, отсутствуют жесткие направляющие для взаимного перемещения рам 1 и 2, а также привод для вращения роликов, наматывающих ленту. Формула изобретения 1. Телескопический ленточный конвейер, содержащий неподвижную и подвижную рамы с закрепленными на них барабанами, огибаемыми лентой с грузонесущей и холостой ветвями, и механизм, компенсирующий длину ленты, отличающийся тем. ЧТО, с целью упрощения конструкции конвейера и повышения удобства в эксплуатации, компенсирующий длину ленты механизм выполнен в виде двуплечих рычагов, закрепленных на подвижной раме с возможностью поворота в вертикальной плоскости, имеющих на одном конце пару роликов, контактирующих соответственно с рабочей и холостой ветвями ленты, а на другом конце - механизм поворота рычагов. 2. Телескопический ленточный конвейер по п. 1, отличающийся тем, что механизм поворота рычагов выполнен в виде противовеса и установленной на оси системы барабанов, при этом крайние барабаны связаны посредством гибких элементов с рычагами, а средний - с противовесом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 412086, кл. Б 65 G 15/26, 1971. 2. Авторское свидетельство СССР № 464489, кл. В 65 G 15/26, 1973 (прототип).
11 78П I ±±
2 20
сри. / 7 -и-Л (риг. i / 1 П1-F тт 11 8
1 П 11
3 В
(Риг. 3
