1
Изобретение относится к системамнаблюдения за движением, в частноеТИ-, на дорогах. х
Значительное увеличение автомобильного парка, которое не может сопровождаться соответствующим ростом путей сообщения, увеличивает плотность транспортного потока на улицах городов и на дорогах или даже автомагистралях, в зависимости от некоторых дней, в огромных размерах.
Известно, что органы власти, обязанные следить за нормальным потоком автомобильного движения, должны быть осведомлены об условиях движения, чтобы иметь возможность в случае необходимости разгрузить особенно загруженные маршруты.
Проблемы, которые ставит быстрый рост парка автомобилей, становятся все важнее, и уличное движение в таких условиях становится все более и более ненадежным.
Известны системы для определения местоположения объектов, содержащие приемо-передатчик на диспетчерском пункте, и приемо-передатчик с антенной на транспортном средстве И.
Наиболее близкой к предлагаемой является система наблюдения за движением транспортных средств, содержащая приемо-передатчик на диспетчерском пункте и приемники, передатчик, блок совпадения, программирующий счетчик циклов, блок синхронизации и размещенный на конечном пункте передатчик 2j .
0
Однако известные устройства осуществляют наблюдения на довольно небольшом участке пути.
Цель изобретения - повышение безопасности движения за счет расшире5ния дальности действия антенны.
Поставленная цель достигается тем, что в системе наблюдения за дви жением транспортных средств, содержащей приемо-передатчик, соединен0ный через дуплексор с антенной, антенна выполнена в виде согласованной линии передачи, расположенной вдоль трассы -движения, в частности, в виде коаксиальной или волноводной линии
5 передачи с продольной излучающей щелью, поперечный размер щели выполнен увеличивающимся в направлении от передатчика.
Антенна создает по всей своей дли
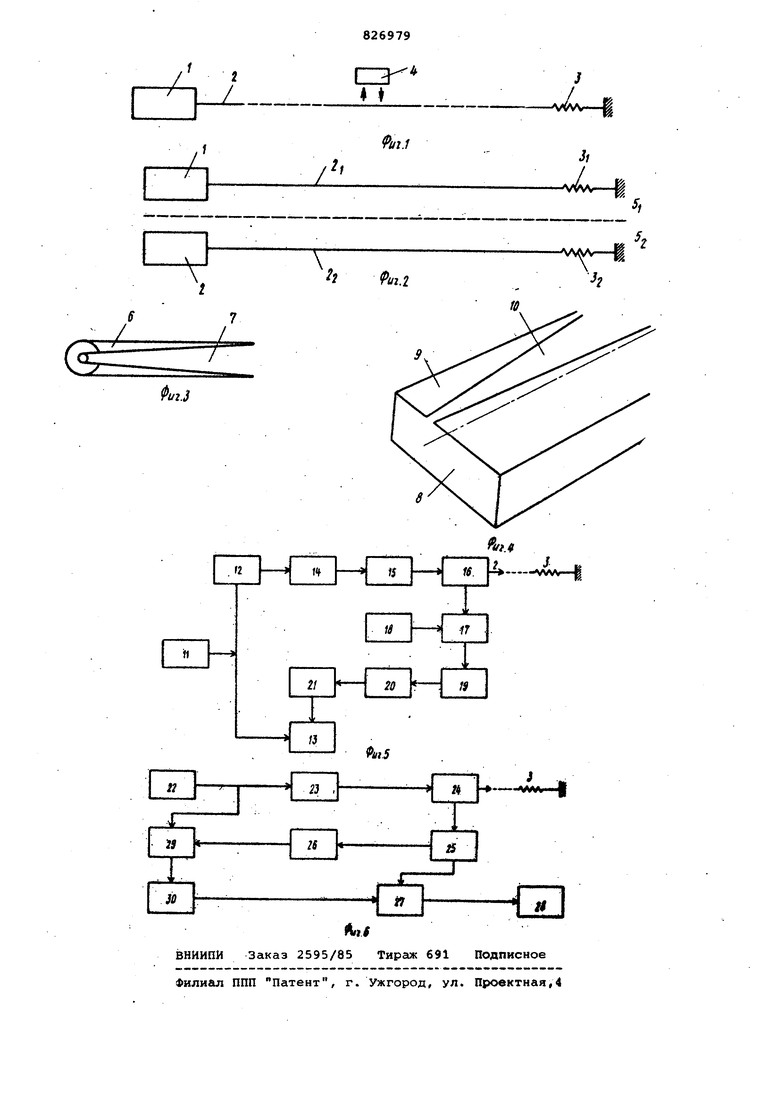
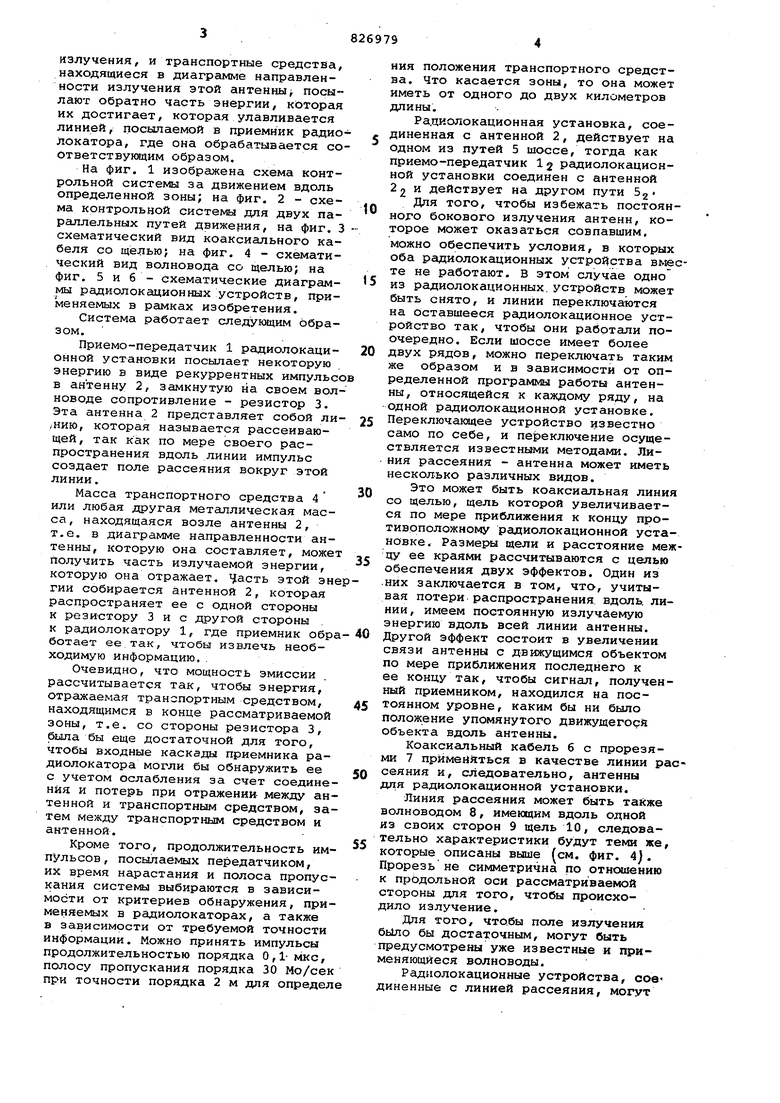
0 не и вокруг нее электрическое поле излучения, и транспортные средства, находящиеся в диаграмме направленности излучения этой антенны посылают обратно часть энергии, которая их достигает, которая улавливается линией, посылаемой в приемник радио локатора, где она обрабатывается со ответствукадим образом. На фиг, 1 изображена схема контрольной системы за движением вдоль определенной зоны; на фиг, 2 - схема контрольной системы для двух параллельных путей движения, на фиг, 3 схематический вид коаксиального кабеля со щелью; на фиг, 4 - схематический вид волновода со щелью; на фиг, 5 и б - схематические диаграммы радиолокационных устройств, применяемых в рамках изобретения. Система работает следующим образом, Приемо-передатчик 1 радиолокационной установки посылает некоторую энергию в виде рекуррентных импульс в антенну 2, замкнутую на своем вол новоде сопротивление - резистор 3, Эта антенна 2 представляет собой ли /нию, которая называется рассеивающей, так как по мере своего распространения вдоль линии импульс создает поле рассеяния вокруг этой линии. Масса транспортного средства 4 или любая другая Металлическая масса, находящаяся возле антенны 2, т,е, в диаграмме направленности антенны, которую она составляет, може получить часть излучаемой энергии, которую она отражает, Часть этой эн гии собирается антенной 2, которая распространяет ее с одной стороны к резистору 3 и с другой стороны . к радиолокатору 1, где приемник обр ботает ее так, чтобы извлечь необходимую информацию,. Очевидно, что мощность эмиссии рассчитывается так, чтобы энергия, отражаемая транспортным средством, находящимся в конце рассматриваемой зоны, т,е, со стороны резистора 3, была бы еще достаточной для того, чтобы входные каскады приемника радиолокатора могли бы обнаружить ее с учетом ослабления за счет соедине ния и потерь при отражении- между ан тенной и транспортным средством, за тем между транспортным средством и антенной. Кроме того, продолжительность им пульсов, посылаемых передатчиком, их время нарастания и полоса пропус кания системы выбираются в зависимости от критериев обнаружения, при меняемых в радиолокаторах, а также в зависимости от требуемой точности информации, Можно принять импульсы продолжительностью порядка 0,1мкс, полосу пропускания порядка 30 Мо/се при точности порядка 2 м для опреде ия положения транспортного средста. Что касается зоны, то она может меть от одного до двух километров лины, Радиолокационная установка, соеиненная с антенной 2, действует на дном из путей 5 шоссе, тогда как приемо-передатчик Ig радиолокационной установки соединен с антенной 22 и действует на другом пути 5,Для того, чтобы избежать постоянного бокового излучения антенн, которое может оказаться совпавшим, можно обеспечить условия, в которых оба радиолокационных устройства в юcте не работают, в этом случае одно из радиолокационных, устройств может быть снято, и линии переключаются на оставшееся радиолокационное устройство так, чтобы они работали поочередно. Если шоссе имеет более двух рядов, можно переключать таким же образом и в зависимости от определенной программы работы антенны, относящейся к каждому ряду, на одной радиолокационной установке, Переключакадее устройство известно само по себе, и переключение осуществляется известными методами. Линия рассеяния - антенна может иметь несколько различных видов. Это может быть коаксиальная линия со щелью, щель которой увеличивается по мере приближения к концу противоположному радиолокационной установке. Размеры щели и расстояние между ее краями рассчитываются с целью обеспечения двух эффектов. Один из .них заключается в том, что, учитывая потери-распространения, вдоль, линии, имеем постоянную излучйемую энергию вдоль всей линии антенны. Другой эффект состоит в увеличении связи антенны с движущимся объектом по мере приближения последнего к ее концу так, чтобы сигнал, полученный приемником, находился на постоянном уровне, каким бы ни было положение упомянутого движущегодй объекта вдоль антенны. Коаксиальный кабель 6 с прорезями 7 примениться в качестве линии рассеяния и, следовательно, антенны для радиолокационной установки. Линия рассеяния может быть также волноводом 8, имеющим вдоль одной из своих сторон 9 щель 10, следовательно характеристики будут теми же, которые описаны выше см. фиг, 4), Прорезь не симметрична по отношению к прбдольной оси рассматриваемой стороны для того, чтобы происходило излучение. Для того, чтобы поле излучения бь1ло бы достаточным, могут быть предусмотрены уже известные и применяющиеся волноводы. Радиолокационные устройства, соединенные с линией рассеяния, могут
быть различного типа в зависимости от информации, которую хотят получить.
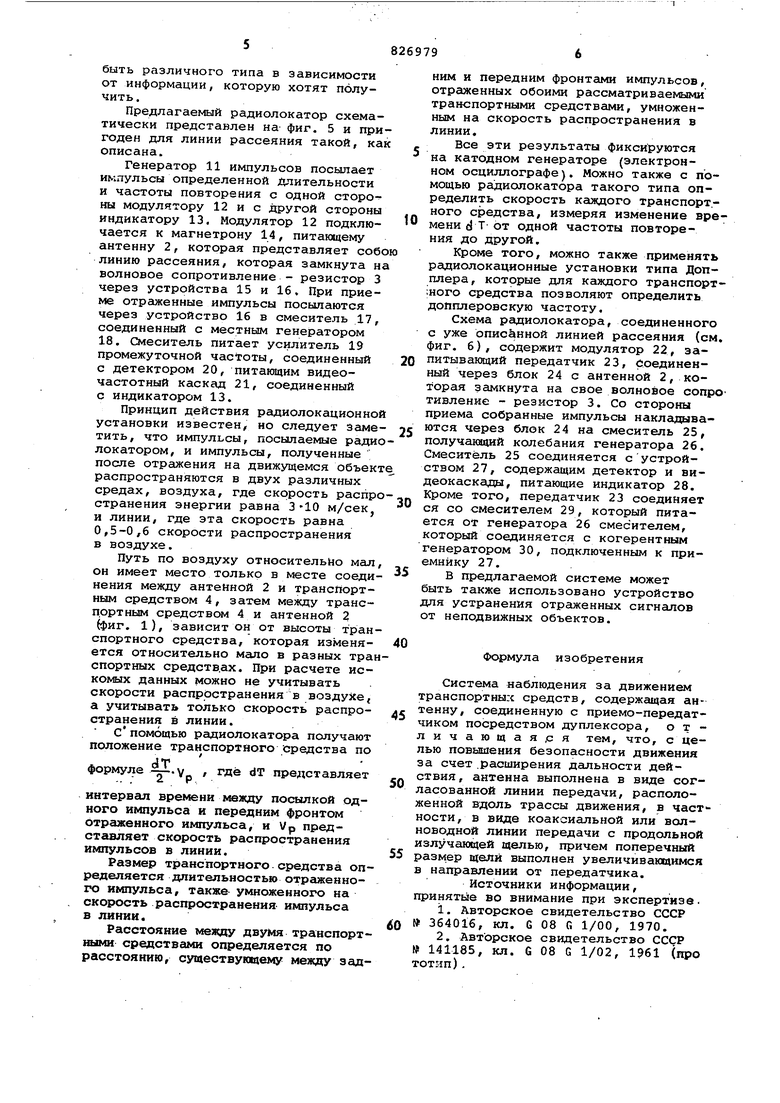
Предлагаемый радиолокатор схематически представлен на фиг. 5 и пригоден для линии рассеяния такой, как описана.
Генератор 11 импульсов посылает импульсы определенной Длительности и частоты повторения с одной стороны модулятору 12 и с другой стороны индикатору 13, Модулятор 12 подключается к магнетрону 14, питающему антенну 2, которая представляет собо линию рассеяния, которая замкнута на волновое сопротивление - резистор 3 через устройства 15 и 16. При приеме отраженные импульсы посылаются через устройство 16 в смеситель 17, соединенный с местным генератором 18. Смеситель питает усилитель 19 промежуточной частоты, соединенный с детектором 20, питающим видеочастотный каскад 21, соединенный с индикатором 13.
Принцип действия радиолокационной установки известен, ио следует заметить, что импульсы, посылаемые радиолокатором, и импульсы, полученные после отражения на движущемся объект распространяются в двух различных средах, воздуха, где скорость pacripo странения энергии равна 3-10 м/сек, и линии, где эта скорость равна 0,5-0,6 скорости распространения в воздухе.
Путь по воздуху относительно мал, он имеет место только в месте соединения между антенной 2 и трансоортным средством 4, затем между транспортным средством 4 и антенной 2 (фиг, 1), зависит он от высоты транспортного средства, которая изменяется относительно мало в разных транспортных средств.ах. При расчете искомых данных можно не учитывать скорости распространения в воздухе, а учитывать только скорость распространения в линии.
С помощью радиолокатора получают положение транспортного средства по
AT формуле Vp / где dT представляет
интервал времени между посылкой одного импульса и передним фронтом отраженного импульса, и Vp представляет скорость распространения импульсов в линии.
Размер транспортного.средства определяется длительностью отраженного импульса, также умноженного на скорость распространения импульса в линии.
Расстояние между двумя транспортными средствами определяется по расстоянию, существующему между задним и передним фронтами импульсов, отраженных обоими рассматриваемыми транспортными средствами, умноженным на скорость распространения в линии.
Все эти результаты фиксируются на катодном генераторе (электронном осциллографе). Можно также с помощью радиолокатора такого типа определить скорость каждого транспорт,ного средства, измеряя изменение времени d Т от одной частоты повторения до другой.
Кроме того, можно также применять радиолокационные установки типа Допплера, которые для каждого транспорт;ного средства позволяют определить допплеровскую частоту.
Схема радиолокатора, соединенного с уже описанной линией рассеяния (см фиг. 6), содержит модулятор 22, запитывакадий передатчик 23, Соединенный через блок 24 с антенной 2, которая замкнута на свое волновое сопр тивление - резистор 3. Со стороны приема собранные импульсы накладываются через блок 24 на смеситель 25, получаюций колебания генератора 26. Смеситель 25 соединяется с устройством 27, содержащим детектор и видеокаскады, питающие индикатор 28. Кроме того, передатчик 23 соединяет ся со смесителем 29, который питается от генератора 26 смесителем, который соединяется с когерентным генератором 30, подключенным к приемнику 27.
В предлагаемой системе может быть также использовано устройство для устранения отраженных сигналов от неподвижных объектов.
Формула изобретения
Система наблюдения за движением транспортных средств, содержащая антенну, соединенную с приемо-передатчиком посредством дуплексора, о т личающая.ся тем, что, с целью повышения безопасности движения за счет .расширения дальности действия , антенна выполнена в виде согласованной линии передачи, расположенной вдоль трассы движения, в частности, в виде коаксиальной или волноводной линии передачи с продольной излучающей щелью, причем поперечный размер щели выполнен увеличивакхцимся в направлении от передатчика.
Источники информации, принятые во внимание при экспертизе.
1.Авторское свидетельство СССР № 364016, КЛ. G 08 G 1/00, 1970.
2.Авторское свидетельство СССР
№ 141185, КЛ. G 08 G 1/02, 1961 (про тотг-ш) .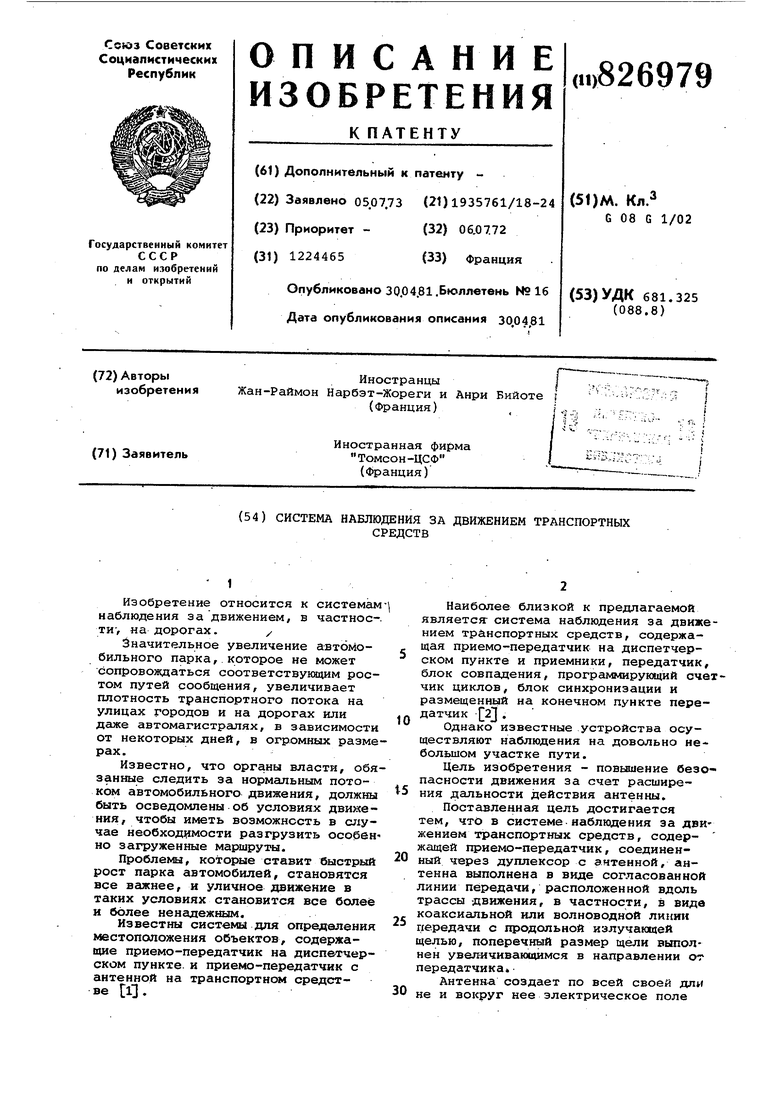
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 1996 |
|
RU2105330C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ОДНОВРЕМЕННОЙ ДВОЙНОЙ ПОЛЯРИЗАЦИЕЙ | 2005 |
|
RU2394254C2 |
| НАЗЕМНАЯ ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ АЭРОПОРТА И РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2115141C1 |
| ПОСАДОЧНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2556708C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ РАДИОЛОКАЦИОННОЙ ОТРАЖАТЕЛЬНОЙ СПОСОБНОСТИ И ДОПЛЕРОВСКОГО СДВИГА ПОСРЕДСТВОМ ИМПУЛЬСНОГО РАДИОЛОКАТОРА | 1999 |
|
RU2249230C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА БЛИЖНЕГО ДЕЙСТВИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ С ПРЕПЯТСТВИЯМИ МАНЕВРИРУЮЩИХ НА АЭРОДРОМЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2001 |
|
RU2192653C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| СИСТЕМА РАДИОПЕРЕДАЧИ ВРЕМЕННЫХ ИНТЕРВАЛОВ | 1990 |
|
RU2126163C1 |
| СИСТЕМА АВТОМОБИЛЬНОЙ БЕЗОПАСНОСТИ | 1994 |
|
RU2065363C1 |
| СПОСОБ СОЗДАНИЯ ЛОЖНЫХ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2586882C1 |