Изобретение относится к импульсным радиолокационным системам и к измерениям, выполняемым с их помощью. В частности, изобретение относится к импульсным радиолокационным измерениям, в которых новый импульс должен быть передан прежде, чем предыдущий импульс пройдет через измеряемый объем. Изобретение может быть использовано в метеорологических радиолокаторах, радиолокационных станциях кругового обзора и дистанционного зондирования, а также в гидролокационных системах.
Импульсный радиолокатор содержит передатчик и приемник. Передатчик передает импульс радиоволны с конечной длительностью, который рассеивается или отражается от среды или твердой цели. Приемник может использоваться для измерения мощности отраженного сигнала и/или доплеровского сдвига.
Выборки из принятого сигнала берутся таким образом, чтобы можно было вычислить мощность посредством возведения в квадрат взятых выборок. Измерение мощности дает информацию относительно радиолокационной отражательной способности цели или среды; отражательная способность часто определяется через эффективную площадь рассеяния или отражения. Оценки доплеровского сдвига основаны на значениях автокорреляционной функции сигнала, которые получаются посредством умножения выборок на выборки, задержанные на желательное значение задержки. Типичные применения импульсного радиолокатора включают метеорологические радиолокаторы, в которых измерения мощности используются для определения количества атмосферных осадков, а измерения задержки используются для определения скорости ветра. Радиолокаторы кругового обзора измеряют местоположение и движение самолета, судов и других целей. Радиолокаторы дистанционного зондирования используются на спутниках, самолетах или вертолетах для измерения различных особенностей поверхности Земли. Кроме того, существуют радиолокационные устройства для научных исследований, используемых для ионосферных измерений (на высотах от 70 до 1000 км) и измерений нижних слоев атмосферы (мезосферно-стратосферно-тропосферные (МСТ) радиолокаторы). Гидролокатор представляет собой устройство, подобное радиолокатору, используемое для подводных измерений с применением акустических волн вместо радиоволн, а лидар (лазерный локатор) представляет собой по существу радиолокатор, в котором вместо радиоволн используется световой пучок лазера. Объект или среду, местоположение и/или перемещение которых измеряется посредством радиолокатора, в общем случае можно определить как цель. Трехмерное пространство, в котором проводится измерение, называется объемом измерения.
В качестве примера рассмотрим метеорологические радиолокационные измерения, использующие равномерную передачу импульсов. Частота повторения импульсов (ЧПИ) выбирается в соответствии с конкретными измерениями.
При измерении радиолокационной отражательной способности используется достаточно низкая ЧПИ (от 300 до 500 Гц) таким образом, чтобы переданный импульс вышел из объема измерения до передачи следующего импульса. Таким образом, принимаемый сигнал будет содержать только отклики из одного объема измерения, давая однозначный результат измерения отражательной способности. Затем максимальная дальность действия измерений может быть вычислена согласно уравнению

где с - скорость радиоволн (скорость акустических волн в случае гидролокатора; и скорость света в случае лидара (лазерного локатора)) в среде, а Т - временной интервал между смежными импульсами, то есть величина, обратная частоте повторения импульсов. Например, для радиоволн, распространяющихся в воздушной среде с частотой повторения 500 Гц, временной интервал между смежными импульсами составляет 2 мс, а максимальная дальность измерений составляет 300 км.
При измерении скорости ветра временной интервал между смежными импульсами определяет максимальную скорость Vmах, которая может быть измерена однозначно. Она может быть определена следующим образом:

где λ - длина волны. На частоте 5,6 ГГц, которая входит в широко используемый частотный диапазон радиолокации, называемый С-диапазоном, Vmax=0,0134·ЧПИ, причем скорость измеряется в метрах в секунду, а частота повторения - в Гц. Типичная величина ЧПИ составляет 1 кГц, в случае которой максимальная измеряемая скорость составляет 13,4 м/с.
Уравнения (1) и (2) показывают, что при увеличении ЧПИ увеличивается максимальная скорость, но максимальная однозначная дальность уменьшается, и наоборот. В реальных измерениях не всегда возможно одновременно измерять и скорость, и дальность, по меньшей мере, неточно. В литературе это явление упоминается как дилемма дальности - доплеровского сдвига или неоднозначность измерений дальности-скорости (см. также: Doviak and Zrnic, "Doppler radars and weather observations", Chapter 3.6, Academic Press, 1993). Никакого решения этой проблемы, как известно, не было в сентябре 1994 г. (см.: COST 75 Weather Radar Systems, International Seminar, Brussels, Belgium, 20-23 September 1994, EUR 16013 EN, 1995; U.S. Department of Commerce, NOAA, Notice for Proposal Solicitation for a solution to "Doppler Dilemma").
Ниже упоминаются известные попытки решить вышеописанную проблему. Патент США №3935572 раскрывает систему, использующую четыре параллельных канала измерения. Патент США №3987443 раскрывает радиолокатор, в котором ЧПИ изменяется время от времени. В патенте США №4328495 каждый импульс содержит закодированные по фазе суб-импульсы. Патент США №4924231 раскрывает способ обработки большого количества передаваемых сигналов и их отражений для нахождения наилучшей корреляции. Патент США №5027122 раскрывает способ улучшения измерения доплеровского сдвига посредством обработки сигнала. Согласно патенту США №5247303 импульсы разделяются на кадры, и по меньшей мере один импульс в каждом кадре преднамеренно искажается. Патент США №5276453 раскрывает способ, основанный на использовании двух различных частот сигнала. Изобретение, раскрытое в патенте США №5583512, использует общий двумерный коррелятор для одновременного определения дальности и доплеровского сдвига. Патент США №5621514 раскрывает систему, которая использует импульсы света вместо радиочастот и в которой принятый сигнал обрабатывается для определения доплеровского сдвига. В патенте США №5659320 рассматривается гидролокатор без учета противоречия между измерениями скорости и отражательной способности. Патент США №5724125 описывает другое измерительное устройство на основе многократно повторяющихся световых импульсов с обработкой сигнала с помощью системы линейных уравнений. Описание РСТ патента WO 96/00909 и соответствующий патент США №5442359 раскрывают арифметические способы обработки принимаемого сигнала.
Если непрерывность измерения не важна, то вышеописанная проблема может быть решена с использованием способа, основанного на так называемых мультиимпульсных кодах, раскрытого, например, в публикации "Multiple-pulse incoherent-scatter correlation function measurement", Farley, Radio Science, 1, pp.661-666. В упомянутом способе малое число импульсов (обычно от 3 до 6 импульсов) передается таким образом, что межимпульсные интервалы являются неравными, будучи (малыми) множителями одного интервала. Затем передача останавливается и начинается прием. Передача не начинается снова до тех пор, пока последний импульс предыдущей последовательности импульсов не уйдет на очень большую дальность, обычно приблизительно 2000 км. Этот способ главным образом применялся в ионосферных радиолокационных измерениях, в которых область, представляющая интерес, находится очень далеко от радиолокатора. В этом случае отраженные сигналы, приходящие из ближней к радиолокатору области, не принимаются вследствие позднего начала приема. Способ не подходит для метеорологических радиолокаторов, а также для радиолокационных станций кругового обзора с малым радиусом действия, так как данные получают только из областей, расположенных далеко от радиолокатора.
В измерениях на основе мультиимпульсных кодов самый короткий межимпульсный интервал определяет наибольшую измеряемую скорость в соответствии с уравнением (2). Полная длина передаваемого мультиимпульсного кода ограничивает наибольшее определяемое значение задержки автокорреляционной функции, но однозначное измерение скорости, в принципе, возможно на дальностях произвольной длины. Измерение мощности не является однозначным, но дает сумму мощностей, отраженных с множества различных дальностей. Таким образом, данные, полученные в одном измерении мощности, составляют объединенные данные для набора дальностей, причем количество дальностей равно числу импульсов в коде. Такой способ измерения мощности рассматривался ранее как бесполезный, но впоследствии способ использования такого измерения был раскрыт в статье "The use of multipulse zero lag data to improve incoherent scatter radar power profile accuracy", Lehtinen, Huuskonen, J. Atmos. Terr, Physics, 48, pp.787-793. Эффективность мультиимпульсных измерений была улучшена посредством использования так называемых перемежающихся кодов, описанных в статье "A new modulation principle for incoherent scatter measurements", Lehtinen, Haggstrom, Radio Science, 22, pp.625-634, причем перемежающиеся коды оказываются значительно более эффективными, чем известные прежде мультиимпульсные коды.
Сущность изобретения
Задача настоящего изобретения заключается в создании способа и системы, обеспечивающих разрешение конфликта между измерением мощности и измерением доплеровского сдвига и позволяющих устранить недостатки, связанные с использованием известных мультиимпульсных кодов.
Указанный результат достигается посредством представления измеренных значений в виде по существу линейной системы уравнений, зависящих от неизвестных значений измеряемых характеристик, и посредством применения теории обратного преобразования к решению упомянутой системы уравнений.
Способ согласно изобретению отличается тем, что он определяет распределение характеристик, измеряемых по некоторому диапазону измерений на различных дальностях, с помощью представления упомянутого распределения посредством по существу линейной системы уравнений, в которой переменные является значениями характеристик, измеряемых на требуемых дальностях, и посредством решения упомянутой по существу линейной системы уравнений для упомянутых переменных.
Изобретение также относится к системе, отличающейся тем, что она содержит средство для решения по существу линейной системы уравнений, в которой переменные являются значениями характеристик, измеряемых на требуемых дальностях от системы вдоль некоторого направления измерения.
В соответствии с изобретением передатчик импульсного радиолокатора передает по существу непрерывную последовательность импульсов, в которой импульсы располагаются на неравных интервалах. Последовательность импульсов наиболее предпочтительно является периодической, так что заданный код, состоящий из импульсов, следующих за друг другом на неравных интервалах, повторяется после заданного так называемого времени цикла. Время цикла выбирается по меньшей мере с длительностью, равной времени, за которое заданный импульс покинет объем измерения. Однако изобретение также применимо для использования не периодических, непрерывно перемежающихся последовательностей импульсов. Приемник осуществляет прием по существу во все те моменты времени, когда передатчик не осуществляет передачу. Принятая мощность дискретизируется для формирования набора последовательных выборок. Каждая выборка может быть представлена как сумма, в которую вносит вклад заданное число импульсов, которые предшествуют выборке. Величина вклада определяется посредством некоторой весовой функции. Кроме того, выборки содержат шум.
Для определения отражательной способности или соответствующей величины для всех требуемых дальностей записывается линейная система уравнений, в которой неизвестными величинами являются требуемые значения измеряемых величин, а их коэффициенты определяются на основе передаваемых импульсов и весовых функций способом, описанным позднее. Значения измеряемых величин определяются посредством решения упомянутой системы уравнений для неизвестных с использованием известного математического средства, например статистической теории инверсии.
Для измерения доплеровского сдвига требуемое число значений автокорреляционной функции получают посредством умножения последовательности выборок на задержанные копии этой последовательности. Полученные в результате так называемые задержанные произведения зависят от автокорреляционной функции рассеяния цели на различных дальностях, представляемой линейной системой уравнений таким же способом, как описано выше для случая отражательной способности, а требуемые значения получаются посредством решения упомянутой системы уравнений способом, подобным способу для случая отражательной способности. При выбранных подходящим образом межимпульсных интервалах каждое измерение задержки зависит только от одной дальности, что позволяет упростить решение системы уравнений, представляющих измерения.
Также изобретение позволяет однозначно определять переменную, измеряемую радиолокатором, в той ситуации, в которой отклики от множества импульсов (или в случае задержек от множества пар импульсов, разделенных одинаковыми интервалами) смещаются в приемнике радиолокатора.
Краткое описание чертежей
Изобретение поясняется описанием конкретных вариантов его осуществления со ссылками на чертежи, на которых представлено следующее:
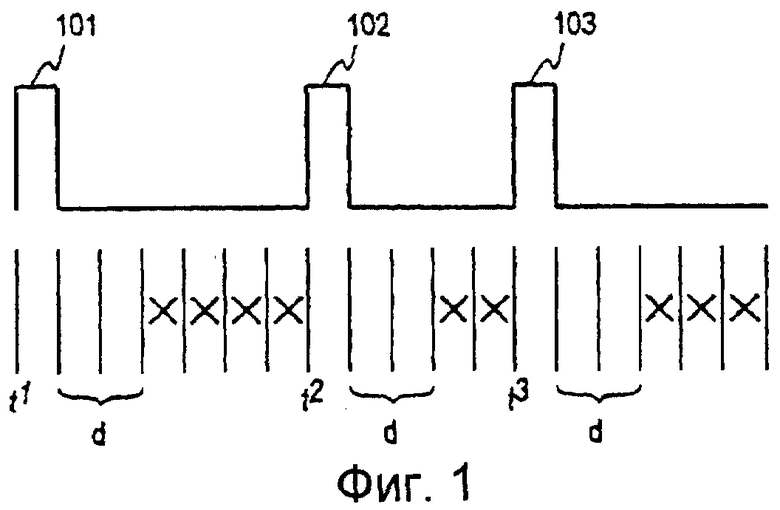
Фиг.1 - простая последовательность импульсов,
Фиг.2 - последовательность импульсов, которая может быть использована в изобретении,
Фиг.3 - иллюстрация вычисления корреляции согласно изобретению и
Фиг.4 - блок-схема системы, соответствующей изобретению.
Подробное описание предпочтительных вариантов осуществления
Рассмотрим в общем виде ситуацию, в которой передатчик импульсного радиолокатора или гидролокатора последовательно передает набор N тождественных по форме, относительно коротких импульсов. Пусть момент передачи n-го импульса будет tn, где n принимает значения от 1 до N. Фазы импульсов могут быть произвольными или заранее выбранными. В это же самое время приемник импульсного радиолокатора или гидролокатора формирует выборки из принятого сигнала. Выборки предпочтительно берутся на равномерных интервалах, и для простоты можно предположить, что длина периода дискретизации равна длительности одного импульса; это предположение, однако, не является ограничивающим фактором для применимости изобретения. Для получения значимых результатов измерений в приемнике не следует учитывать выборки, взятые во время передачи импульса или сразу же после нее, в течение так называемого защитного временного интервала. Фиг.1 изображает простую диаграмму синхронизации, в которой передатчик передает импульсы 101, 102 и 103 в моменты t1, t2 и t3, а приемник берет выборки во временных интервалах, отмеченных символами X. Защитный временной интервал помечается буквой d, и в данном примере его длина составляет два временных слота.
Если набор имеет N импульсов, он также имеет N периодов приема (каждый импульс сопровождается периодом приема, который начинается в конце защитного временного интервала и заканчивается при передаче следующего импульса). Обозначим выборки, взятые в течение n-го периода приема, как z

в котором Δt представляет длину периода дискретизации. Мощность, принятая в течение одного периода дискретизации, равна сумме отраженных сигналов, приходящих от различных дальностей, сигналы от которых записываются как P(kΔt), a мощность шума равна Pε. Математически это можно представить в виде

Весовые функции A
Когда приемник осуществляет прием на протяжении всей длительности посылки последовательности импульсов (игнорируя выборки, взятые во время передачи и защитного временного интервала), результатом является конечный набор выборок Z
которая является известным способом представления линейной системы уравнений. Неизвестные представляют собой мощности, отраженные с различных дальностей, представляемых вектором Р. При использовании теории линейной инверсии для системы уравнений (5) может быть задана оценка решения:

где ∑ - так называемая ковариационная матрица погрешностей измерения, a ∑р - так называемая ковариационная матрица решений, которая может быть записана как

Если в качестве ковариационной матрицы погрешностей измерения Z используется единичная матрица, то данное решение является тем же самым, что и часто используемое псевдообратное решение. Более высокая точность решения может быть достигнута посредством использования вместо единичной матрицы ковариационной матрицы погрешностей измерения, которая может быть либо оценена из измеряемых данных, либо вычислена теоретически известным способом, раскрытым, например, в публикации, озаглавленной "The accuracy of incoherent scatter measurements: error estimates valid for high signal levels", Asko Huuskonen, M.S. Lehtinen, J. Atmos. Terr. Phys., Vol.58, No.1-4, pp.453-463, 1996.
С точки зрения настоящего изобретения не обязательно, чтобы уравнения, представленные выше, использовались для обратного решения линейной системы уравнений. Специалистам известно, что могут использоваться другие, более быстрые способы для достижения того же самого обратного решения, такие как, например, QR (квазирегулярное) разложение или SVD (однозначное) решение, которые являются известными численными методами решения матричных уравнений.
В некоторых ситуациях вычисление выполняется проще, с учетом того факта, что решение линейной системы уравнений (5), представляемой уравнениями (6) и (7), по существу состоит из коэффициентов, которые не зависят от измерений. Решение, показанное в уравнении (6), может быть записано в более простом виде как

где матрица В определяется как 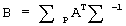 и может быть вычислена заранее. Затем, после получения посредством измерений выборок, которые записываются как элементы вектора Z, для соответствующих значений мощности, представляющих различные дальности, осуществляют оценки, которые представляют отражательные способности на различных дальностях и являются элементами вектора
и может быть вычислена заранее. Затем, после получения посредством измерений выборок, которые записываются как элементы вектора Z, для соответствующих значений мощности, представляющих различные дальности, осуществляют оценки, которые представляют отражательные способности на различных дальностях и являются элементами вектора  и могут быть вычислены из уравнения (8) с использованием простых операций умножения и суммирования.
и могут быть вычислены из уравнения (8) с использованием простых операций умножения и суммирования.
Фиг.2 изображает последовательность импульсов, используемую в предпочтительном варианте осуществления изобретения в системе координат, в которой горизонтальная ось представляет время, а вертикальная ось представляет передаваемую мощность радиоизлучения, таким образом, что фаза импульсов выше опорной линии в середине чертежа отличается на π радиан от фазы импульсов ниже опорной линии. Длина последовательности импульсов по оси времени составляет 12 мс. Длительность каждого импульса составляет 1 мкс, а межимпульсный интервал составляет приблизительно 0,5 мс для самого короткого и приблизительно 2 мс для самого длинного. Последовательность импульсов состоит из 12 импульсов, так что средняя ЧПИ составляет 1000 Гц, а коэффициент заполнения составляет приблизительно 0,1%, что соответствует коэффициенту заполнения типичного метеорологического радиолокатора уровня техники. Рассмотрим применение метеорологического радиолокатора, в котором максимальная дальность действия обычно составляет 450 км; а соответствующее время - приблизительно 3000 мкс. Предположим далее, что время дискретизации равно длительности импульса, то есть 1 мкс, а защитный временной интервал, или время после передачи импульса, в течение которого выборки игнорируются, составляет 6 мкс.
Первый вариант осуществления настоящего изобретения отличается из известных способов, основанных на мультиимпульсном кодировании, тем, что последовательность импульсов, показанная на фиг.2, передается циклически, то есть повторяется снова и снова, без значительной паузы между циклами повторения. Приемник берет выборки из принятого сигнала по существу все время на интервалах 1 мкс (время дискретизации) таким образом, что в течение передачи последовательности импульсов, показанной на фиг.2, будет взято 12000 выборок. Из этих выборок только 12+12·6=94 бесполезны вследствие одновременной передачи (1 мкс) или защитного временного интервала (6 мкс), так что при оценке способа мы можем предположить, что имеется приблизительно 12000 выборок. Антенна метеорологического радиолокатора обычно перемещается относительно медленно, так что можно предположить, что на протяжении заданного времени, например 0,5 секунды, радиолокатор измеряет по существу одну и ту же цель. Эффект случайных ошибок уменьшается, когда последовательность импульсов, согласно фиг.2, повторяется в течение этого времени, а результаты из отдельных циклов повторения усредняются. С учетом предположений, сделанных выше, должно быть усреднено приблизительно 40 повторений. Затем должен быть проверен объем вычислений, требуемый для обработки такого количества выборок.
Второй вариант осуществления изобретения вместо циклически повторяющейся последовательности импульсов применяет последовательность импульсов, которая постоянно изменяется и в которой не найдется двух интервалов между импульсами, имеющих одну и ту же длину. Последнее упомянутое ограничение применяется по меньшей мере ко всем таким парам интервалов между импульсами, которые являются достаточно близкими к друг другу, чтобы обеспечить потенциальную однозначность в измерении.
Выше упоминалось, что время, соответствующее максимальной дальности измерения, составляет приблизительно 3000 мкс. Поскольку дискретизация осуществляется на интервалах длительностью 1 мкс, имеется приблизительно 3000 неизвестных значений мощности вектора  в уравнении (8). Вектор Z уравнения (8) содержит приблизительно 12000 выборок, так что размеры матрицы В уравнения (8) составляют приблизительно 3000×12000 элементов; это означает, что уравнение (8) представляет арифметические операции с числом операций умножения 3000×12000 умножений и таким же числом операций сложения. Если такие арифметические операции должны выполняться раз в 0,5 секунды, то требуемый объем вычислений составит приблизительно 144 миллионов операций с плавающей запятой в секунду, что является вполне приемлемой характеристикой для современного компьютера на дату приоритета настоящего изобретения. Объем вычислений, требуемый для осуществления усреднения, здесь игнорируется.
в уравнении (8). Вектор Z уравнения (8) содержит приблизительно 12000 выборок, так что размеры матрицы В уравнения (8) составляют приблизительно 3000×12000 элементов; это означает, что уравнение (8) представляет арифметические операции с числом операций умножения 3000×12000 умножений и таким же числом операций сложения. Если такие арифметические операции должны выполняться раз в 0,5 секунды, то требуемый объем вычислений составит приблизительно 144 миллионов операций с плавающей запятой в секунду, что является вполне приемлемой характеристикой для современного компьютера на дату приоритета настоящего изобретения. Объем вычислений, требуемый для осуществления усреднения, здесь игнорируется.
Кроме того, в случае необходимости потребность в объеме вычислений может быть радикально уменьшена. Если в последовательности импульсов на фиг.2 временные различия между импульсами выбраны такими, что они являются кратными величинами заданного относительно малого числа, то вычисления согласно уравнению (8) разделяются на отдельные независимые совокупности. Пусть упомянутое относительно малое число будет равно К и сохраняются другие вышеупомянутые предположения неизменными. Тогда мы получим К взаимно независимых совокупностей, так что в каждой совокупности можно вычислять 3000/К оценок мощности, и для каждой совокупности требуется 12000/К (усредненных) выборок. Уравнение (8) может быть записано в виде:

в результате чего каждая матрица Вк имеет 3000/К×12000/К элементов. Можно заметить, что требуемый объем вычислений уменьшается до К-й части значения, упомянутого выше. Если К составляет, например, 10, то требуемый объем вычислений составляет только 14,4 миллионов операций с плавающей запятой в секунду.
Выше было описано измерение мощности, направленное на определение радиолокационной отражательной способности на различных дальностях от радиолокатора, вплоть до заданной максимальной дальности. Ниже описано измерение автокорреляционной функции рассеяния цели в способе согласно изобретению или так называемое измерение доплеровского сдвига.
Специалистам известно измерение доплеровского сдвига в приемнике импульсного радиолокатора на основе так называемого автокорреляционного анализа, и существует ряд альтернативных способов для его реализации. Один из вариантов состоит в том, чтобы определить спектр принятого сигнала и согласовать его с известной спектральной моделью, например, гауссова спектра, используя известный алгоритм согласования. Алгоритм согласования находит частотный сдвиг, при котором известная спектральная модель лучше всего коррелирует со спектром принятого сигнала. Результирующий сдвиг равняется доплеровскому сдвигу, вызванному в сигнале средой или движением цели, и может быть использован для вычисления радиальной скорости среды или цели относительно радиолокационной аппаратуры.
Другой известный способ для определения доплеровского сдвига раскрыт в патенте США №5442359. В этом способе последовательность выборки, представляющая принятый сигнал, задерживается на время, равное разности по времени между двумя импульсами, и вычисляется корреляция задержанной последовательности выборки с незадержанным сигналом. Корреляция является комплексной функцией фазового угла, в котором не разрешена однозначность, и могут содержаться множители, кратные 2π. В патенте США №5442359 эта проблема решается тем, что, когда были вычислены корреляции для множества различных задержек, множители, кратные 2π, добавлялись к их фазовым углам таким образом, что находилась самая лучшая корреляция в смысле наименьшего среднеквадратичного отклонения для фазовых углов и некоторого однозначного доплеровского сдвига.
В способе согласно изобретению задержанные произведения вычисляются из выборок, принятых для определения доплеровского сдвига, формы спектра или спектральных моментов (ширины и т.д.). При вычислении задержанного произведения для некоторой задержки τ выборка, взятая в момент времени i, умножается на комплексно сопряженную выборку, взятую в момент времени i+τ. Это повторяется для всех возможных значений момента i. Задержанные произведения, вычисленные при различных значениях τ, дают значения задержанных произведений на различных дальностях, которые могут быть вычислены на основе моментов дискретизации и моментов передачи импульсов. Эти задержанные произведения следует вычислять только для задержек, которые соответствуют разности во времени между некоторыми двумя импульсами в передаваемом импульсном коде, но эти импульсы не обязательно должны быть смежными.
Пусть 12 импульсов, показанных на фиг.2, будут обозначены в последовательном порядке символами от А до L. Импульсы, переданные в течение следующих 12 мс, аналогично обозначим символами от А’ до L’, Поскольку код повторяется идентично после 12 мс, положения импульсов на шкале времени в течение первых двух циклов будут следующие:
Из положений импульсов на шкале времени, как показано в таблице 1, можно вычислить все возможные межимпульсные разности по времени. Из них 120 наименьших даны в микросекундах в таблице 2. При анализе времен передачи импульсов, перечисленных в таблице 1, можно видеть, что, например, задержанное произведение, рассчитанное для задержки 520 мкс, является произведением, в котором выборки, принятые после импульса D, и выборки, принятые после импульса Е, умножаются одна на другую, тогда разность времен дискретизации будет 520 мкс.
Имеется соответствующая разность между импульсами D’ и Е’. Так, в случае второго прохождения эхо-сигнала, которое известно в традиционной технологии метеорологической радиолокации, две пары импульсов имеют одинаковое расстояние. С другой стороны, поскольку момент передачи пары импульсов D’ и Е’ происходит на 12000 мкс позже, чем момент передачи пары импульсов D и Е, пара импульсов D и Е уже покинет объем измерения до того, как пара импульсов D’ и Е’ поступит в него, и, следовательно, измерение может быть осуществлено однозначно. Это основано на предположении, сделанном ранее, согласно которому максимальная измеряемая дальность соответствует 3000 мкс: поскольку приведенный для иллюстрации код выбран таким, что идентичные межимпульсные разности по времени повторяются только раз каждые 12000 мкс, каждое измерение задержки (исключая измерение при нулевой задержке, описанное выше как измерение мощности) является однозначным, то есть измерение непосредственно дает значение задержки автокорреляционной функции на заданной дальности.
Настоящее изобретение не ограничивается случаем, согласно которому данная пара импульсов должна выйти из объема измерения прежде, чем может быть передана другая пара импульсов с идентичной межимпульсной разностью по времени. Если имеются две пары импульсов, действующие одновременно, то к измерению доплеровского сдвига можно применить обратное решение, обсуждавшееся выше в связи с описанием измерения мощности. Поскольку характеристика измеряемой цели представляет собой автокорреляционную функцию рассеяния, то вектор Z в по существу линейной системе уравнений, согласно уравнению (5), представляет задержанные произведения, вычисленные для заданной задержки из выборок, взятых из принимаемого сигнала в различные моменты времени. Элементы матрицы А представляют весовые функции или функции неоднозначности, а Р является вектором, элементы которого представляют фактические значения автокорреляционной функции на требуемых дальностях. Система уравнений решается так же, как и выше, учитывая, однако, что  является вектором, элементы которого представляют оценки автокорреляционной функции на требуемых дальностях.
является вектором, элементы которого представляют оценки автокорреляционной функции на требуемых дальностях.
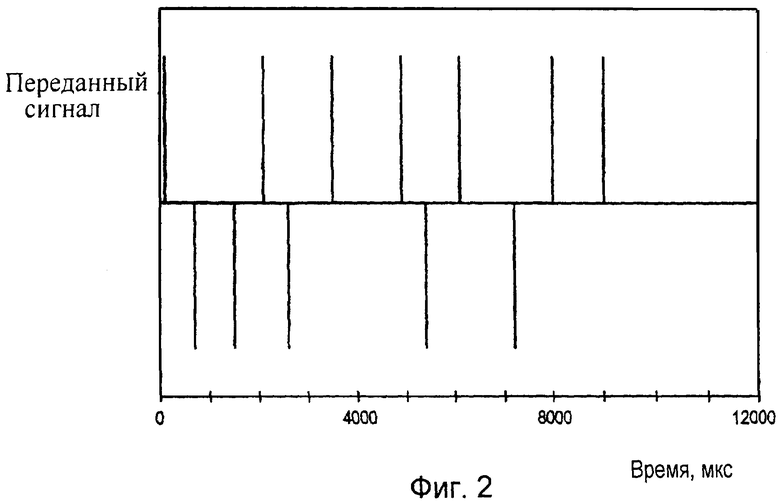
В качестве второго примера рассмотрим значение задержки, равное 1110 мкс, которое вычисляется из импульсов С и Е (а также из пар С’-Е’ и С’’-Е’’, и т.д.). Это иллюстрируется на фиг.3. Она изображает некоторые из переданных импульсов дублированными. Нижняя последовательность импульсов переместилась налево до такой степени, что нулевое время соответствует времени передачи импульса С. Верхняя последовательность импульсов переместилась налево до такой степени, что нулевое время соответствует времени передачи импульса Е. Из чертежа следует, что никакая другая пара импульсов не совпадает на оси времени. Первая пара импульсов, которая должна совпасть, является парой импульсов С’ и Е’, которая передается на 12000 мкс позднее и, следовательно, не видна на фиг.3.
Возможно, что для некоторых дальностей измерение с задержкой 1110 мкс невозможно выполнить. Если приемник радиолокатора должен быть выключен в течение продолжительности передачи импульса и остается выключенным в течение короткого времени после передачи импульса (защитный временной интервал), то измерения не возможны для дальностей, меньших, чем некоторая минимальная дальность. Если, например, защитный временной интервал составляет 6 мкс, то первое задержанное произведение или оценка автокорреляционной функции для задержки 1110 мкс получается, когда первая выборка, взятая после импульса С (через 1446 мкс, на 6 мкс позже времени передачи импульса 1440 мкс), и комплексно сопряженное значение первой выборки, взятой после импульса Е (через 2556 мкс), умножаются друг на друга. Это произведение является оценкой на такой дальности от радиолокатора, которая соответствует времени распространения 6 мкс. Следующее произведение получается путем добавления одного интервала дискретизации к обоим значениям времени, и это произведение относится к дальности, которая соответствует времени распространения, большему на один интервал дискретизации. Перекрестные произведения выборок, умноженных друг на друга, образуют так называемый профиль задержки.
На самом деле измерение не может быть осуществлено для некоторых дальностей, поскольку имеются пропуски выборок из любой из последовательностей выборок ввиду наличия защитного временного интервала, связанного с передачей импульсов. Диаграмма 301 в верхней части фиг.3 представляет формирование профиля задержки для всех дальностей, соответствующих времени распространения от 0 до 3000 мкс, а промежутки в диаграмме 301 представляют дальности, для которых измерение не может быть выполнено. Тот факт, что для некоторых дальностей нет результатов измерения, не является критическим, поскольку положения, выбранные для импульсов в коде, гарантируют, что измерения для этих дальностей будут получены с использованием других очень близких значений задержки.
Вычисление произведений могло бы продолжаться до тех пор, пока передается пара импульсов С’ и Е’. Однако, поскольку принята максимальная дальность 450 км, что соответствует 3000 мкс, вычисление профиля задержки может быть остановлено на 3000 мкс, в соответствии с фиг.3, так что результат будет содержать приблизительно 3000 пар выборок.
Вышеописанная обработка выполняется для желательного числа профилей задержки; ограничивающим фактором главным образом является доступный объем вычислений. Каждый новый профиль задержки вносит вклад в информационное содержание измерения. Известная спектральная модель (например, гауссов спектр с доплеровским сдвигом) может быть согласована с профилем задержки посредством использования известных методов согласования. Также можно определить фазовый угол способом, подобным раскрытому в вышеупомянутом патенте США №5442359.
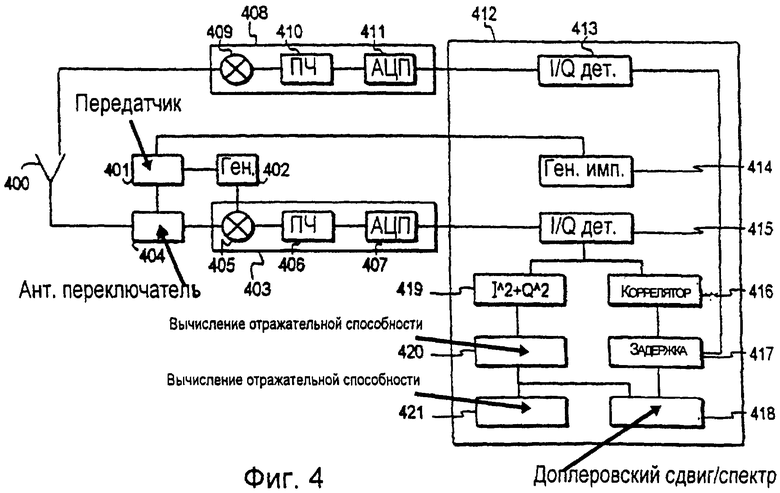
На фиг.4 представлена блок-схема радиолокационной системы согласно изобретению. В этом примере антенна 400 функционирует как передающая и приемная антенна и сигнал направляется от передатчика 401 к антенне или от антенны к приемнику 403 посредством дуплексного антенного переключателя 404. Приемник 403 содержит хорошо известные компоненты: смеситель 405 промежуточной частоты (ПЧ), усилитель 406 ПЧ и аналого-цифровой преобразователь 407. Используемая при частотном преобразовании частота поступает в смеситель 405 ПЧ и передатчик 401 из гетеродина 402. В данном примере выполнения радиолокационной установки передаваемый импульс измеряется посредством отдельного приемника 408, который состоит из аналогичных компонентов: смесителя 409 ПЧ, усилителя 410 ПЧ и аналого-цифрового преобразователя 411. Измерение передаваемых импульсов необходимо, если передатчик использует магнетрон, поскольку в этом случае фаза импульса не может непосредственно контролироваться. В случае использования клистронных передатчиков фаза импульса известна с более высокой точностью, и необязательно требуется измерение передаваемых импульсов.
В приведенном для примера устройстве передатчик 401 управляется, и полученные данные обрабатываются компьютером 412. Формы импульсов и последовательности импульсов генерируются в генераторе 414 импульсов посредством программного обеспечения. Детектирование сигнала выполняется посредством программного обеспечения в блоке 415 синфазного и квадратурного (I/Q) детектирования. Для детектирования измеряемых импульсов передачи система, показанная на фиг.4, имеет отдельный блок 413 детектирования. Вычисление отражательной способности начинается с возведения в квадрат сигнала в блоке 419, полученный результат обрабатывается для обеспечения однозначности по дальности посредством решения в блоке 420 уравнений, представляющих отклик измерения. Окончательные результаты радиолокационной отражательной способности вырабатываются в блоке 421. После того, как значения отражательной способности для различных дальностей были вычислены в соответствии с изобретением, окончательные результаты могут быть выработаны и сохранены и/или отображены пользователю известным способом. В случае метеорологического радиолокатора типичным окончательным результатом является картинка, на которой значения отражательной способности интерпретируются как метеорологические явления (типа дождя различных интенсивностей) и представляются графически с использованием цветовых кодов. Изобретение не ограничивает способ формирования или предоставления окончательных результатов.
Вычисление значений задержки является несколько более сложным. Перекрестные произведения выборок вычисляются в блоке 416, после чего в блоке 417 решаются уравнения, в зависимости от диапазона задержек. Коэффициенты этих уравнений зависят от фаз передаваемых импульсов. Следовательно, данные, представляющие передаваемые импульсы, измеряемые приемником 408, включаются в решение уравнений в блоке 417. Окончательные результаты для скорости и доплеровского спектра вырабатываются в блоке 418, который может также использовать данные, полученные для отражательной способности в блоке 420. Что касается получения и сохранения и/или представления окончательных результатов, то это осуществляется аналогично тому, как в случае определения отражательной способности.
Способ согласно изобретению и арифметические блоки, описанные выше, предпочтительно реализуются в аппаратуре, изображенной на фиг.4, таким образом, что компьютер 412 содержит по меньшей мере одно программируемое запоминающее устройство, в котором записана программа для управления работой компьютера 412, при этом способ, соответствующий изобретению, является частью упомянутой программы. Программирование матричных операций, вычисление задержанных произведений и другие арифметические операции, описанные выше, в процессах, выполняемых посредством компьютера, хорошо известны специалистам в данной области техники. Для реализации способа, соответствующего изобретению, а также других задач, относящихся к управлению работой передатчика 401 и приемников 403 и 408, компьютер 412 может содержать один или большее количество процессоров. Предпочтительно компьютер 412 также содержит средство, которое само по себе известно, предназначенное для управления перемещением антенны 400. Для простоты упомянутое средство не показано на фиг.4. Система, изображенная на фиг.4, может быть размещена стационарным способом на наземной станции или на транспортном средстве, таком как самолет, или может быть реализована как переносная.
Варианты осуществления изобретения, описанные выше, служат только для целей иллюстрации и не ограничивают изобретение. В частности, изобретение не ограничивает число импульсов в циклически повторяющемся импульсном коде и их позиционирование по времени цикла или состав непрерывно изменяющейся последовательности импульсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| Способ и система для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров | 2022 |
|
RU2804147C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ИЗ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИЗНАКОВ ИДЕНТИФИКАЦИИ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СВЕРХРАЗРЕШЕНИЯ | 2015 |
|
RU2589737C1 |
| РАДИОЛОКАТОР ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРА | 2023 |
|
RU2811547C1 |
| СПОСОБ ВЫБОРА ИНТЕРВАЛА ИНВЕРСНОГО СИНТЕЗИРОВАНИЯ С РАССЧИТЫВАЕМОЙ УГЛОВОЙ СКОРОСТЬЮ ПОВОРОТА ЦЕЛИ ОТНОСИТЕЛЬНО РАДИОЛОКАТОРА | 2007 |
|
RU2360267C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
| СПОСОБ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ФИЛЬТРАЦИИ МЕШАЮЩИХ ОТРАЖЕНИЙ В ШИРОКОПОЛОСНЫХ РАДИОЛОКАЦИОННЫХ СИГНАЛАХ | 2004 |
|
RU2337374C2 |
| КОСМИЧЕСКИЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЮЩИЙ ИЗОБРАЖЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ | 1999 |
|
RU2158008C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
| Способ оценки пространственного размера воздушной цели по частотной протяженности доплеровского портрета | 2018 |
|
RU2679396C2 |
Изобретение относится к импульсным радиолокационным системам и к измерениям, выполняемым с их помощью, и может быть использовано в метеорологических радиолокаторах, радиолокационных станциях кругового обзора и дистанционного зондирования, а также в гидролокационных системах. Технический результат заключается в разрешении конфликта между измерением мощности и измерением доплеровского сдвига, а также в устранении недостатков, связанных с использованием мультиимпульсных кодов. При измерении характеристик цели радиолокатором или гидролокатором передают импульсы, а между передачами импульсов принимают сигнал, который зависит от передаваемых импульсов и от распределения характеристик цели на различных дальностях, при этом передаваемые импульсы образуют циклически повторяемый импульсный код или непрерывно изменяющуюся последовательность импульсов. Упомянутое распределение определяют посредством его представления в виде линейной системы уравнений, в которой переменные являются значениями измеряемых характеристик на требуемых дальностях, и посредством решения упомянутой линейной системы уравнений. 2 с. и 10 з.п. ф-лы, 2 табл., 4 ил.
Z=AP,
а ее решением является

где Z - вектор, элементы которого представляют квадраты выборок, взятых из принятого сигнала в различные моменты времени, элементы матрицы А представляют весовые функции или функции неоднозначности, Р - вектор, элементы которого представляют действительные значения отражательной способности на требуемых дальностях,  - вектор, элементы которого представляют оценки отражательной способности на требуемых дальностях, и матрица В является матрицей решения системы уравнений.
- вектор, элементы которого представляют оценки отражательной способности на требуемых дальностях, и матрица В является матрицей решения системы уравнений.
Z=AP,
а ее решением является

где Z - вектор, элементы которого представляют задержанные произведения некоторой задержки в различные моменты времени, вычисленные из выборок, взятых из принятого сигнала; элементы матрицы А представляют весовые функции или функции неоднозначности, Р - вектор, элементы которого представляют действительные значения автокорреляционной функции на требуемых дальностях;  - вектор, элементы которого представляют оценки автокорреляционной функции рассеяния на требуемых дальностях, и матрица В является матрицей решения системы уравнений.
- вектор, элементы которого представляют оценки автокорреляционной функции рассеяния на требуемых дальностях, и матрица В является матрицей решения системы уравнений.
 где ∑ - ковариационная матрица погрешностей измерения, а ∑р - ковариационная матрица решения.
где ∑ - ковариационная матрица погрешностей измерения, а ∑р - ковариационная матрица решения.| US 5724125 А, 03.03.1998 | |||
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| US 5442359 А, 15.09.1995 | |||
| US 5394155 А, 28.02.1995 | |||
| Сетевые спутниковые радионавигационные системы | |||
| Под ред | |||
| B.C.ШЕБШАЕВИЧА | |||
| - М.: Радио и связь, 1993, с.49-58. | |||

