Шток 7 связан со штоком 8 с помощью траверсы 18.
Электрогидравлический привод работает следующим образом.
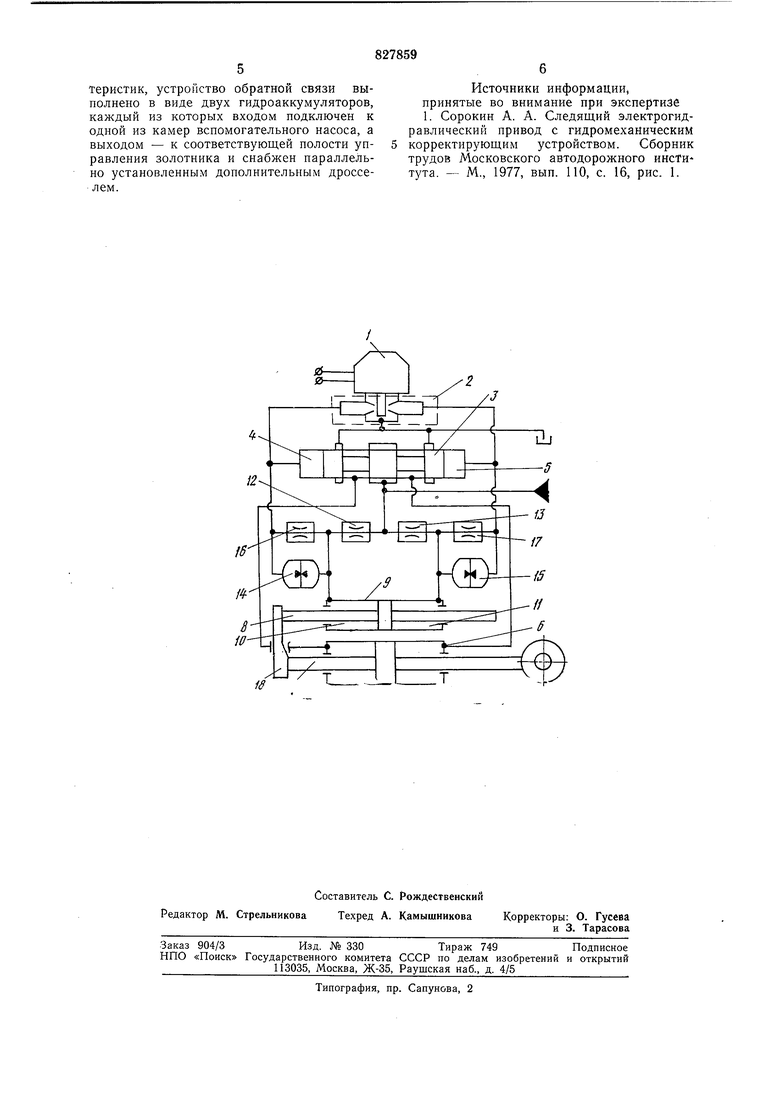
Прп отсутствии входиого сигнала на электромеханическом преобразователе 1 гидравлический мост, образованный дросселями 12, 13 и 16, 17 и элементом соплозаслонка 2, уравновешен и расход в полостях управления 4 и 5 отсутствует.
Если золотник 3 не находится в нейтральном положении, а смещен вправо (по чертежу), то шток 7 гпдродвигателя 6 перемещается в ту же сторону, вызывая через траверсу 18 движение штока 8 насоса 9. Расход, создаваемый пасосом 9 в камерах 10 и 11, суммируется с расходами, протекающими через дроссели 12 и 16, 13 и 17, что способствует увеличению давления в камере И и расходу через дроссель 17 и уменьшению давления в камере 10 и расходу через дроссель 16. Разность расходов через дроссели 16 и 17 поступает в полости 4 и 5 и перемещает золотник 3 влево (нейтральное положение). Апалогично, при начальном смещении золотника 3 влево он будет возвращен в пейтральпое положение. Гидродвигатель 6 останавливается.
При наличии электрического входного сигнала возникает перепад давления в полостях 4 п 5. Золотник 3 перемещается, например, вправо, шток 7 гидродвигателя 6 движется в том же направлении. С ростом скорости штока 7 увеличивается расход насоса 9, что вызывает увеличение расхода через дроссель 17 и уменьшение расхода через дроссель 16. Разность расходов через эти дроссели вычитается из расхода в полостях управления, создаваемого элементом сопло-заслонка 2, и суммарный расход в полостях 4 и 5 при определенной скорости штока 7 становится равным нулю. Золотник 3 останавливается и скорость штока гидродвигателя прекращает изменяться.
Если под действием внешнего усилия на гидродвигателе 6 скорость штока 7, например, уменьшается от первоначальной величины, то уменьшается и расход насоса 9. Разность расходов через дроссели 16 и 17 становится меньше и снова возникает расход Б полостях управления, что вызывает перемещение золотника 3 вправо. По достижении первоначальной скорости, а следовательно, первоначальной разности расходов скорость штока 7 возрастает, золотнпк 3 останавливается, обеснечивая неизменность скорости гидродвигателя 6.
Прп возрастании входного сигнала золотник 3 перемещается вправо, а скорость штока 7 увеличивается до того равновесного значения, при котором расходы через первый каскад гидроусилителя и через дроссели 16 и 17 останавливают золотник 3.
При других сочетаниях знаков входного сигнала и нагрузок обратная связь по скорости обеспечивает слежение скорости штока 7 гидродвигателя за величиной входного сигнала, причем установившееся значение скорости гидродвигателя 6 не зависит
от величины и направления внешнего усилия нагрузки.
Расходы через гидроаккумуляторы 14 и 15 пропорциональны производпым от перепадов давлений в дросселях 16 и 17 и при
неизменной скорости гидродвигателя 6 отсутствуют.
Если скорость штока гидродвигателя увеличивается, например, при его движепии вправо, что соответствует перемещеПИЮ золотппка 3 вправо, то перепад давлений на дросселе 17 увеличивается, а на дросселе 16 уменьщается. Гидроаккумуляторы 14 и 15 создают расходы, направленные вправо. Это снижает скорость золотпика 3 и ускорение штока гидродвигателя 6. При других сочетаниях направлений скоростей и ускорений штока гидродвигателя расходы гидроаккумуляторов ведут (принцип отрицательной обратной связи) к
уменьшению ускорения, что уменьшает резонанс инерционной нагрузки и повышает устойчивость привода.
Благодаря постоянному потоку жидкости через дроссели 12 и 13, 16 и 17 режим течения рабочей жидкости в них может быть турбулентным, повышающим температурную стабильность характеристик привода. Перегулируемые ллечи моста, образованного дросселями 12 и 13, 16 и 17 и элементом
сопло-заслонка 2, представляют собой делители давления, обладающие линейными расходными характеристиками в широком диапазоне расходов насоса 9, поэтому прпвод имеет линейные характеристики. Указанный гидравлический мост обладает как поперечной, так и продольной симметрией, что обеспечивает симметричность характеристик привода.
Применение предлагаемого привода в системах управления рабочими органами доролсных и строительных машин позволит повысить эффективность их использования.
Формула изобретения
Электрогидравлический привод, содержаший электромеханический преобразователь и двухкаскадный гидроусилитель с первым каскадом, выполненным в виде элемента сопло-заслонка, и золотпиком второго каскада, имеющим две полости управления, управляющим потоком жидкости к гидродвигателю, шток которого кинематически связан со штоком двухкамерного вспомогательного насоса, при этом камеры последнего сообщены между собой п с источником питания через дроссели постоянного сечения, а с помощью устройства обратной связи - с полостями управления золотника, отличающийся тем, что, с целью улучшения статических и динамических характеристик, устройство обратной связи выполнено в виде двух гидроаккумуляторов, каждый из которых входом подключен к одной из камер вспомогательного насоса, а выходом - к соответствующей полости управления золотника и снабжен параллельно установленным дополнительным дросселем.
Источники информации, принятые во внимание при экспертизе 1. Сорокин А. А. Следящий электрогидравлический привод с гидромеханическим корректирующим устройством. Сборник трудов Московского автодорожного института. - М., 1977, вып. ПО, с. 16, рис. 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический привод | 1979 |
|
SU827860A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД ДРОССЕЛЬНОГО | 1972 |
|
SU335453A1 |
| Электрогидравлический привод | 1979 |
|
SU817327A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU903585A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| УНИВЕРСАЛЬНАЯ ГИДР&СИСТЕМ.4 СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1971 |
|
SU307755A1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1970 |
|
SU278337A1 |
15
