(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИП ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический привод | 1979 |
|
SU827860A1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU909359A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU909360A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU903585A1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| Электрогидравлический привод | 1979 |
|
SU827859A1 |
| Гидравлический привод | 1981 |
|
SU1059286A1 |
| Электрогидравлический привод | 1979 |
|
SU808713A1 |
1
Изобрете.ние относится К области гидропривода и может использоваться в качестве силового привода объектов с больщой инерционной нагрузкой: рабочих органов дорожных, строительных и сельскохозяйственных машин, органов управления наземного транспорта, судови летательных аппаратов
Известен электрогидравлический Привод, содержащий гидродвигатель . с рабочими полостями, золотник с управляющими камерами, гидроусилител имеющий линию слива, и два гидроаккумулятора, каждый из которых подключен между одной из рабочих полостей и одной иэ управляющих камер 1.
Недостатками известного привода, в котором реализована .обратная связь по динамическому давлению, является то, что мощность, необходимая для управления подпружиненным золотн ком, и эффективная площадь упругих разделителей гидроаккумулятозров должна быть большой,а из жесткость - малой. Это приводит к уменьшению собственной частоты гидродвигателя с инерционной нагрузкой и ограничивает тем самым достижимые показатели точности при работе в составе следящей системы.
Кроме того, запас хода упругих разделителей гидроаккумуляторов должен быть выбран с учетом их перемещений без упора во всем рабочем диапазоне давлений, вызванных нагрузками на гидродвигателе. Указанный запас хода дополнительно уве.ш1чивается из-за того, что начальные положения упругих разделителей из-за
0 малых давлений в управляющих камераЬс отличаются .от их средних положений при работе привода под Давлением питания. Наконец, наличие синхронизирующих пружин приводит к взаимовлиянию
5 гидроаккумуляторов и гидроусилителя, при этом запаздывания переходных процессов гидроусилителя, равно как и запаздглвания переходных процессов по цепи корректирующей обратной связи, существенно возрастают. В ре-
0 зультате габариты привода оказываются увеличенными, а динамические характеристики ухудша отся.
Цель изобретения - уменьшение
5 габаритов привода и улучшение его динамических характеристик.
Указанная цель достигается тем, что гидроусилитель снабжен обратной связью по положению золотника, .выполненного свободноплавгиоцим, а в гидО
ролинию слива гидроусилителя включен дроссель.
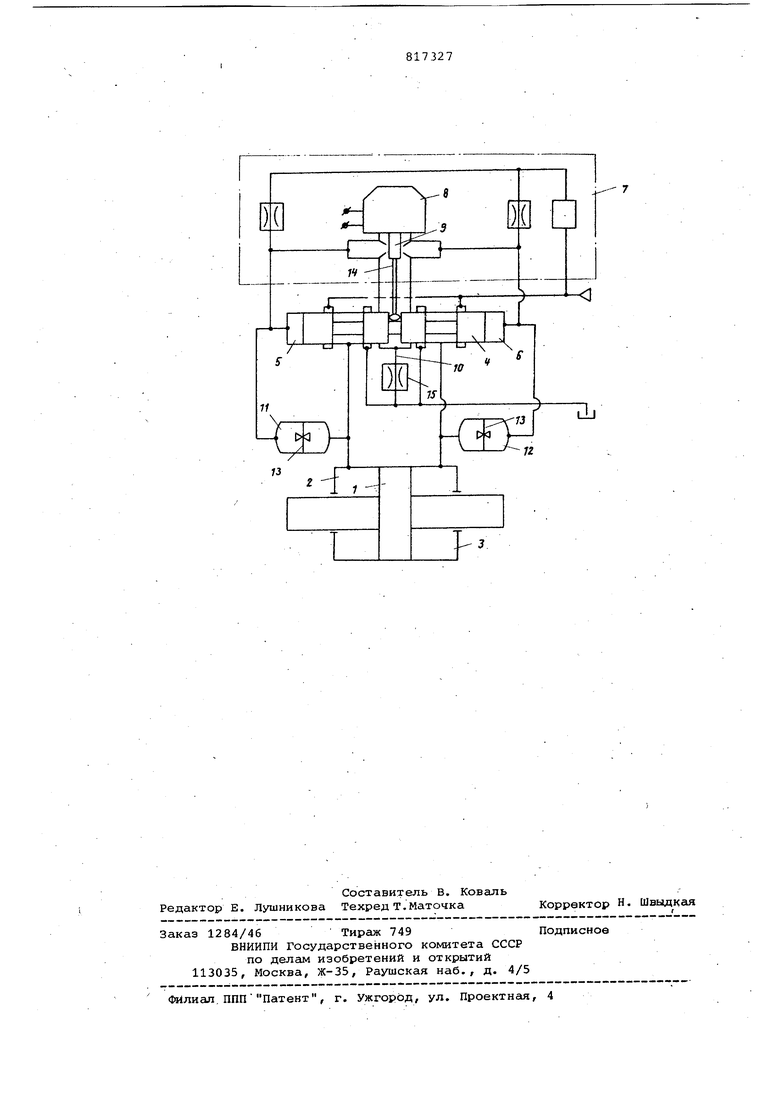
На чертеже показана принципиальная схема привода.
Электрогидравлический привод содержит гидродвигатель 1 с рабочими полостями 2 и 3, золотник 4 с управляющими камерами 5 и 6, гидроусилитель 7 типа сопло-заслонка, имеющий электромеханический преобразователь 3 с заслонкой 9 и гидролинию слива 10, и два гидроаккумулятора 11 и 12 с упругими разделителями 13 их рабочих камер. Гидроаккумулятор 11 подключен к рабочей полости 2 и к управляющей камере 5, а гидроаккумулятор 12 подключен к рабочей полости 3 и к управляющей камере 6. Гидроусилитель 7 снабжен обратной связью по положению золотника 4, выполненной, например, в виде пружины обратной связи 14. Золотник 4 выполнен свободноплавающим, т. е. не имеющим торцовых -пружин. В гидролинию слива 10 включен дроссель 15.
Упругие разделители 13 могут быть выполнены, например, в виде подпружиненных поршней, мембран или сильфонов.
Проводимость дросселя 15 выбирается, такой, чтобы при подаче давления питания и отсутствии входного сигнала разделители 13 занимали средние положения внутри гидроаккумуляторов 11 и 12. . ,
Электрогидравлический привод работает следующим образом.
При подаче входного сигнала на электромеханический преобразователь 8 золотник 4 смещается из своего нейтрального положения и гидродвигатель 1 начинает движение. Если усилие нагрузки на гйдродвигателе 1 неизменное, например, при движении гидродвигателя 1 вправо (по чертежу) является противодействующим, то упругие разделители 13 гидроаккумуляторов 11. к 12 перемещаются под действием возросшего давления в рабочей полости 2 и уменьшившегося давления в рабочей полости 3 влево на расстояние, пропорционсшьное величине усилия. При неподвижных упругих разделителях 13, т. е. при постоянной на грузке на гидродвигателе 1, они не создают расходов в управляющих камерах5 и 6.
Если нагрузка инерционная и гидродвигатель 1 движется с изменяющимся ускорением, перепад давления в рабочих полостях 2 и 3, пропорциональный ускорению массы нагрузки, меняется. При этом упругие разделители 13 перемещаются ив управляющих камерах 5 и б возникает корректирующий расход, имеющий скорость золотника 4. Например, при- возрастающем ускорении при движении гидродвигателя 1 вправо (по чертежу), что соответствует движению золотника 4 влево, давление в рабочей полости 2 возрастает, а врабочей полости 3 уменьшается, упругие разделители 13 перемещаются влево, расходы, создаваемые ими. при перемещении, поступают в управляющие камеры 5 и 6, где суммируются с расходами, создаваемыми в этих камерах гидроусилителем 7. В результате движение золотника 4 замедляется, что приводит к уменьшению ускорения гидродвигагеля 1. Аналогично при упругих сочетаниях знаков скоростей и ускорений гидродвигателя 1, обратная связь по производной от перепада давлений в рабочих полостях 1 и 2 ограничивает ускорение гидродвигателя 1, что позволяет уменьшить резонанс инерционной нагрузки и улучшить устойчивость привода.
Мощность управления золотником 4 невелика, так. как осевые нагрузки на нем небольшие. Поэтому эффективная площадь разделителей 13 может быть малой, а жесткость - большой. Такие гидроаккумуляторы несущественно уменьшают собственную частоту гидродвигателя 1 с инерционной нагрузкой, запас хода упругих разделителей 13 у них может быть уменьшен. Благодаря начальной установке разделителей 13 посредством регулировки дросселя 15 в средние положения, запас хода увеличивать не требуется. Кроме того, взаимовлияние гидроусил-ителя 7 и гидроаккумуляторов 11 и 12 практически не влияет на запаздывания переходных процессов. Таким образом, габариты привода уменьшаются, а динамические характеристики становятся лучше.
Формула изобретения
Электрогидравлический привод, содержащий гидродвигатель с рабочими полостями, золотник с управляющими кмерами, гидроусилитель, имеющий линию слива, и два гидроаккумулятора, каждый из которых подключен между одной из рабочих полостей и одной из управляющих камер, отличающийся тем, что, с целью уменьшения габаритов привода и улучшения его динаг/шческих характеристик, гидроусилитель снабжен обратной связью по положению золотника, выполненного свободноплавающим, а в гидролинию слива гидроусилителя включен дроссель.
Источники информации, принятые во внимание при экспертизе
13JT
a 7c5QO
