(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ЗАГРУЖАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический загружатель | 1983 |
|
SU1128005A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ СОЗДАНИЯ РЕГУЛИРУЕМЫХ ДИНАМИЧНЫХ НАГРУЗОК | 2008 |
|
RU2352912C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305211C2 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305210C2 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| Сегментный затвор с гидравлическим приводом | 2022 |
|
RU2810327C1 |
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2406620C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2534128C1 |
| Плавниковая движительная установка | 1989 |
|
SU1782866A2 |
1
Изобретение относится к электроидравлическим системам, используеым для измерения давления жидких еществ, а именно для одновременного змерения двух и более величин давения при исследованиях динамических характеристик приводов летательных аппаратов.
Известно устройство, состоящее из силового г щроцилиндра, соединенного с электрогидравлическим усилителем и датчиком перепада давления, связанньм с узлом сравнения, второй вход которого подключен к задающему устройству, а выход - к входу регулятора, соединенного с электрогидрав/1ическим усилителем, при этом шток поршня силового гидроцилиндра связан через шатунный механизм с загружаемым объектом 1 J
Известны также электрогидравлические системы, содержащие управляемый электрогидравлическим усилителем (ЭГУ) гидроцилиндр, датчик перепада давления в частях которого совместно с задатчиком подключен к элементу сравнения, связанному с регулятором, выход которого подключен к управляющему входу ЭГУ. В указанных системах, которые могут быть использованы и для управления загружателем, в качестве датчиков обратной связи используются также датчики положения и угловой скорости нагрузки 2.
Однако указанные системы не обладают высокой динамической точностью при отработке быстро изменяющегося входного воздействия из-за инерционности и транспортного запаздывания. Кроме того, при изменении скорости загружаемого объекта изменяется давление в силовом гидроцилиндре, которое система отрабатывает по цепи обратной связи.
Цель изобретения - повышение точности и быстродействия загружателя.
Это достигается тем, что в электргидравлическом загружателе, содержащем последовательно включенные задатчик, элемент сравнения, регулятор электрогидравлический усилитель, соединенный с полостями гидроцилиндра, шток которого связан с шатунным механизмом, датчик перепада давления в полостях гидроцилиндра, подключенный к другому входу элемента сравнения, датчик угловой скорости и датчик положения, установлены блок умножения, нелинейный блок и фазоопережающий элемент, а датчики угловой скорости и положения устан.овлени в ueHTjje моханр эма и подключены ооотиотствеино к блоку умножения и иегги не иному блоку, выход которого соединен с другим входом блока ум юження, подключенного через Фазоопережаюп;н11 элемент к другому входу электрогидразлического усилителя . Доподнительныгл от;1И;ием является то, что в установлен блогс динамической кОррокц -1И, состоящий из последовательно в;слю1-1еннЕ- 1х трех инерцион1{ых звеньев и реального ди(рференцирующего звена, выход которого связан с третьим входом элемента сравнения, а вход первого инерционного звена соединен с выходо . регулятора.
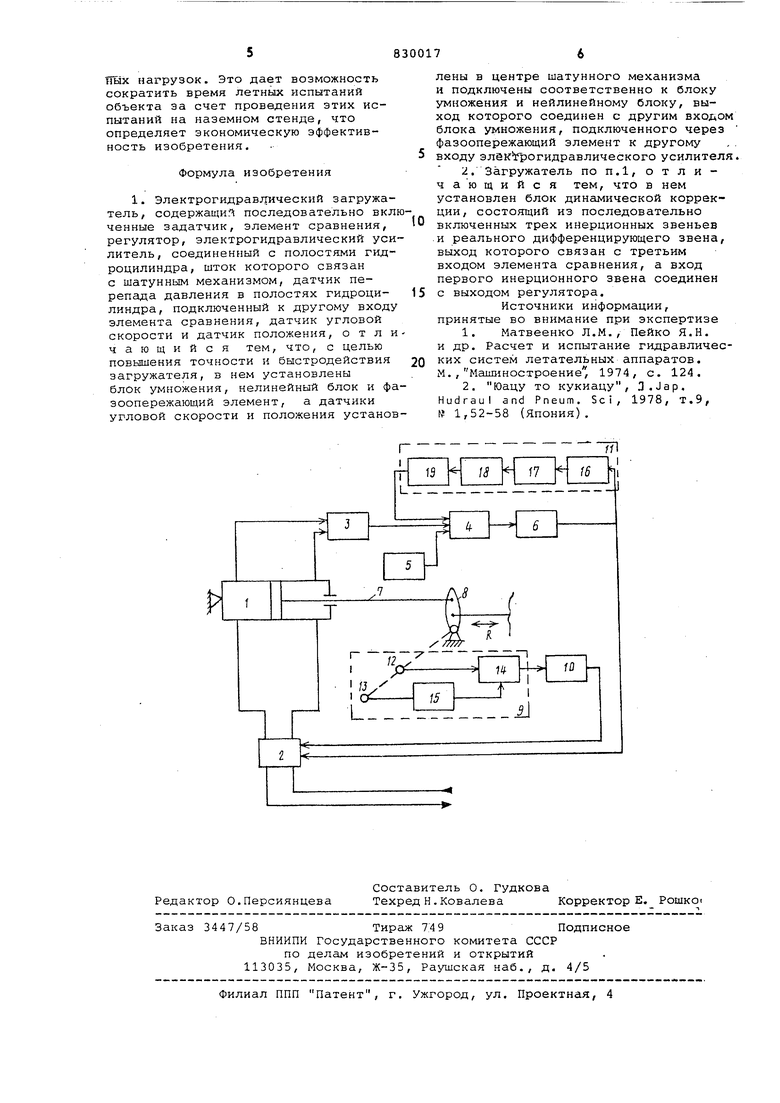
На чертеже прегдставлена схема элекгрог1- дравлического загружателя. Электрогидрапличес1с;-:Г; загружатель соTOi-iT из гидроцидиндр-а 1 , эдектрогидравлическ.ого усилителя 2, датчика 3 переиада дааления, блока 4 сравнения заддатчи(а 5, регулятора б, штока 7 поршня (.оилозого) гилродиди ;дра, шатунного механизма 8, л.
у
динеИЮи скорости персмеп ения, выподнен11ого iia основе датчика 12 yij ioвой , ;атчика 13 полс:)же;;ия, бдока 14 умножения и нел;1нейного блока 15, (кнзоопорежающего эдемеита 10, блока 11 динамической кор-рекции, тз1:1;юча оцего в себя три; после;;ОБатедь; О соединенных инерционных ,. :)-1 У и циру1С1цео- звено 19.
Э :екгроги.цравличе1,-:: ий зaгpyжaтGJ:b работает с л ел;у iощ; ; м о б р а :. о ..
Сигнал задания, ироиорциональн1Лй значению моменаа захчзузки, поступает в блок 4 сравне и-1я, iv-e гюпрерывно сравниваете; с , поступающим с датчика 3 перепада давдения, выдающего электрический сигнал, пропорционадьный иереиадгу давдения в полос :ях силового гидрог идиИдра, Си-г нал р ас с о г л сЮ ОБ аи и я и ос ту и ае т на вход регулятора G, формируюь- его закон регул ировг1ния, и далее и а вход электрогидравлического усилителя 2, регудирую;:;его расход рабочей жидкости, поступающей в полости силового 1ид;рО1Ди.иии,дра , осуществлягаще го загруз к у о б ъ е к т а.
Изменение скорости иереме;дения загружаемо1 о объекта ири неизменном расходе через электрогидра1зличесг;;- й усилитель 2, приводит к ;зменен;:ю перепада давдеш-ья ц полостях силового гидpcн, 1 , Для сохранеь;ия ие - 3мен:-;ого переиада давлеиия в полостях силового гидроиидиндра необходимо ,мгь:овенно изменять расход жидкости через электрогидравлическиИ усилите.г:ь Е соответствии с изме-гением оксизости перемещения объекта. С зтой целью внодится датчик 9 линейной с-горости, , пропорциональный скорости перемеще ия загружаемого объекта, с датчика 9 линейной скорости через фазоопере ;а ощ;й элемент 10, компенсирующее ;г -1ерционность электрогидравдичес} ого усилителя 2, воздеИств ет на э} ектрогидравдический ycил iтeдь 2, мгновенно Изменяя жидкости через него. При перемещении объекта, связа}1ного с 11;атунньт -.1 механизмом, с датчика 12 угловой скорости, установленного в дентре враще 1ия шатуип-югО механизма поступает сигнал на блок 14 ум:чожеия. Одновременно с ддатчика 13 поло ;ения, установленного в том же це;нтре вращения шатунного механизма, поступает сигнал на блок: 15, реализую;ггий нелинейность, определяемую зависимостью угловогО иодожени.я шатунног ;охаииз а от перог/ егдсния :и:ока сило-кчо гидроци;1и11дра. Сигнал с блока 1 г;ОС1упая на 14 умножение, корретирует сит-нал Д5атчика скоро с т . -1 2 S
TjjaHcnopLHOe запаз;;ыьание элегстрог дразз.1ического уси;: - тсд1я не иоэводяет получить контур регу;1ирования с большим коэффипиенто.- ус;:дения, ; еoSxojuiMivji ,;;.1я иоотроо;и я систем с ПйсокоИ д;п1аг.ичеокоИ точностно.
С целью ;:овы1иения ;{ОЭ(;:фиц ;ента ус;и;еиия контура ре;/удирования в;:О,:д}5Тся блек 11 динамичес;;о;: корре; ции, включающий Б себя модель обье; та , состоящую из трех носледоватсд}дю соеди1не;И;кх jiiiepi.iiCi-:;,1х н. 16-15, нерС:;да :c.;4iiL:c :;-ун:(ЦИи кото J)ix ссот летсчвуют ::е::Сди1тсчн:..;м (Ьунк циям 3, 1, 2, вхсд ;;;;их т.; контур регyJИipOБaния, и реального ;дифференцирук::иэго звена, постоянная времеЕПкоторого определяется ве:1ичиной транспортного запаздывания здо трогидроусили.ив-пя 2. При возд;ойст;;; И :::о стоpOHi 3 задатчи1са 5 сигнал с вглходда рсгулятО)эа 6 иостуиает на ьдектрогидроуоид1итель 2 и иреобразу;;тся в рг;сход; жиддкости через вре.мя, опред5елу;емое тра;-:спортн;лм заиазд:,-:ванием. электрогидроусидитедя 2, зюэдому изменения на цени обратной связи с ддзтчика перепад; давдения 3 в течение этого времени не iipoисходдит, При введдении бд1ока 11 ческоИ коррекции сигнал с регулятора б поступает на блок 11 динамической коррекции., вкдючаю Г1Ий модед;ь объекта в которой отсутствует транспортное запаз,;.гывание, чдО сразу приводит к снижению рассогдасОвания .
Это позвод;51ет су;дественно увеличить коэффициент усиления ; онтура и, следовательно, его ддинамдгческую точность .
Повыидение точ.чости и быстродействия электрогидтравли-геского зад-ружателя позволяед гпэоводить ИДярение частотных характеристик во всем диапазоне рабочих частот загружаемого об зекта с учетом реальных нагрузок. Это дает возможность сократить время летных испытаний объекта за счет проведения этих испытаний на наземном стенде, что определяет экономическую эффективность изобретения. Формула изобретения 1. Электрогидравлический загружа тель, содержащий последовательно вк ченные задатчик, элемент сравнения, регулятор, электрогидравлический ус литель, соединенный с полостями гид роцилиндра, шток которого связан с шатунным механизмом, датчик перепада давления в полостях гидроцилиндра, подключенный к другому вход элемента сравнения, датчик угловой скорости и датчик положения, отл чающийся тем, что, с целью повышения точности и быстродействия загружателя, в нем установлены блок умножения, нелинейный блок и ф эоопережающий элемент, а датчики угловой скорости и положения устано
Г
771 лены в центре шатунного механизма и подключены соответственно к блоку умножения и нейлинейному блоку, выход которого соединен с другим входом блока умножения, подключенного через фазоопережающий элемент к другому входу элекЬ5рогидравлического усилителя. 2. Загружатель по п.1, отличающийся тем, что в нем установлен блок динамической коррекции, состоящий из последовательно включенных трех инерционных звеньев и реального дифференцирующего звена, выход которого связан с третьим входом элемента сравнения, а вход первого инерционного звена соединен с выходом регулятора. Источники информации, принятые во внимание при экспертизе 1.Матвеенко Л.М., Пейко Я.Н. и др. Расчет и испытание гидравлических систем летательных аппаратов. М. , Машиностроение, 1974, с. 124. 2. то кукиацу, J.Jap, Hudraul and Pneum. Sci, 1978, т.9, № 1,52-58 (Япония).
