Система активной виброзащиты и стабилизации относится к области машиностроения и служит для управления колебаниями амортизируемой массы (корпуса машины, кабины, сиденья водителя и др.) и/или стабилизации ее положения в пространстве. Система может быть использована в летательных аппаратах, колесных и гусеничных машинах и других областях техники.
Интенсивность колебаний широкого класса объектов возрастает с увеличением мощностей силового оборудования, ростом скоростей движения транспортных средств. Требования, предъявляемые к системам виброзащиты, как правило, противоречивы. С одной стороны, эти системы должны быть достаточно податливы для получения удовлетворительных виброзащитных характеристик, с другой - быть достаточно жесткими, чтобы не допустить больших относительных смещений амортизируемого объекта во время движения. Для транспортных средств, кроме того, необходимо обеспечить постоянный контакт управляемых колес с дорогой. Традиционные системы виброзащиты из пассивных упругодиссипативных элементов не могут в полной мере обеспечить противоречивые требования, предъявляемые к параметрам колебаний амортизируемых систем.
Для задач виброзащиты и стабилизации оптимальность в переходных процессах является основой задачи. При этом не нужно отыскивать оптимальные траектории движения амортизированной и стабилизируемой массы. Вместо этого требуется обеспечить высокое быстродействие и точность при осуществлении назначенных траекторий движения амортизированной и стабилизируемой массы в переходных процессах.
Системы активной виброзащиты и стабилизации являются сложными нелинейными многомерными системами автоматического управления, функционирующими, как правило, в нестационарных условиях. Для решения задачи предлагаются алгоритмы интеллектуального управления на основе адаптивных регуляторов, связывающих фазовые координаты системы и критерий качества управления и сочетающие точность и быстродействие без перерегулирования при гарантированной устойчивости системы.
Известна система активной виброзащиты и стабилизации, реализованная в конструкции регулятора, который решает известные и новые классы задач, требующих осуществления предписанных свойств движения в переходных процессах.
Известна динамическая система в виде двух масс, соединенных упругодиссипативными связями и силовым приводом. Схема активной двухмассовой колебательной системы может быть снабжена пассивными упругодиссипативными связями или активными связями и содержит: m1, m2 - амортизированная и неамортизированная массы; Р1-P5 - силы, действующие на массы m1 и m2; х - вертикальное перемещение амортизированной и/или стабилизируемой массы m1 и m2; у - вертикальное перемещение неамортизированной массы m2; q - кинематическое возмущение, исполнительный механизм в виде гидроцилиндра двойного действия с перемещением z плунжера [1].
Для демонстрации возможностей регуляторов разработана специальная визуальная среда компьютерного моделирования, которая позволяет в предельно короткий срок оценить качество регуляторов при решении различных задач управления, в частности задач управления колебаниями: многоопорных колесных и гусеничных шасси; кабины, сиденья человека-оператора мобильной машины, специальных контейнеров, установленных на мобильных машинах, и др. Для быстроходных гусеничных шасси специального назначения и для многоопорных колесных машин чрезвычайно важной задачей является уменьшение продольно-угловых колебаний шасси. Оптимальность в переходных процессах при этом является основой задачи.
Известны классические технологии, основанные на теории оптимальных систем: динамическое программирование, принцип максимума, принцип минимума обобщенной работы, аналитическое конструирование регуляторов и др. Эти технологии не позволяют для реальных нелинейных систем построить регулятор в замкнутом виде, не говоря уже о том, чтобы встроить в управления критерий качества в явной форме. Для определения оптимальных параметров регулятора при использовании этих методов на конечном этапе требуется, как правило, привлечение численных методов оптимизации.
Достоинства система активной виброзащиты и стабилизации на базе регуляторов заключаются в следующем.
1. Регуляторы связывают в замкнутой форме управление с параметрами критерия качества управления и выходными переменными управляемой системы, в том числе исполнительного механизма.
2. Сочетаются высокая точность и быстродействие без перерегулирования.
3. Обеспечивается адаптивность управления благодаря использованию производных второго порядка и выше управляемой переменной.
4. В различных типах регуляторов могут использоваться производные выходной переменной от первого до четвертого порядка. Имеется возможность выбора из этого класса регулятора, обеспечивающего простоту реализации при приемлемой точности управления.
5. Предусматривается возможность учета и компенсации недостатков используемых силовых исполнительных приводов (утечки жидкости в гидроприводах, противо-ЭДС в электроприводах и др.).
6. Открывается возможность создания и производства интеллектуальных регуляторов нового поколения, обладающих патентной чистотой.
Известная система неполностью решает техническую задачу - обеспечения плавности хода транспортного средства и стабилизации положения амортизированной массы вследствие высокой инерционности в связи параллельным соединением пассивных упругодиссипативных элементов и сервоцилиндра с последовательно соединенным релаксационным элементом, выполняющим свои функции на частотах выше 10 Гц.
В качестве прототипа известна система активной виброзащиты, которая включает подвеску амортизируемой массы, содержащую амортизируемую массу, гидродвигатель с электрогидравлическим усилителем двухстороннего действия, установленный параллельно упругому элементу, плунжер гидродвигателя не жестко связан с амортизируемой массой, при этом корпус силового цилиндра гидродвигателя присоединен к неамортизированной массе - источнику кинематического возбуждения, например, к оси колеса или раме машины [2].
Работа известной системы заключается в том, что измеряют сигнал, пропорциональный усилию, передающемуся на виброизолируемую массу. Активная система виброзащиты с электрогидравлическим приводом с преобразователем типа «сопло - заслонка» формирует сигнал управления, пропорциональный вышеупомянутому усилию.
Прототип не в полной мере решает техническую задачу обеспечения виброзащиты и стабилизации амортизируемой массы, например транспортного средства, в связи с относительно высокой инерционностью гидравлической и электрической частей сервопривода (используется только текущая величина ускорения амортизированной массы и относительное перемещение амортизированной и неамортизированной масс). При этом не используются экстремали, формируемые на основе эталонных свойств движения амортизированной/стабилизируемой массы в каждый момент времени [2].
Недостатки прототипа состоят в следующем:
- не установлена связь критерия качества управления с формируемым сигналом управления. Критерий качества является основой задачи управления и от его формулировки зависят результаты управления;
- для формирования сигнала управления используются только действующие на амортизируемую массу усилия. При этом управление формируется в противофазе к этим усилиям;
- не учитывается состояние исполнительного механизма силового привода;
- не предусмотрена динамическая стабилизация положения амортизированной массы;
- не обеспечивается адаптивность управления;
- не представляется возможность сочетать точность и быстродействие управления;
- задающее устройство не участвует в формировании управления.
В основу изобретения поставлена техническая задача - повышение эффективности виброзащиты и стабилизации путем создания комфорта на рабочем месте, снижения утомляемости водителя и исключения развития профзаболеваний - заболеваний опорно-двигательного аппарата водителей транспортных средств, повышения плавности хода и стабилизация положения корпуса транспортного средства относительно положения статического равновесия.
Техническая задача изобретения достигается тем, что в системе активной виброзащиты и стабилизации, включающей подвеску амортизируемой и стабилизируемой массы, содержащую амортизируемую и стабилизируемую массу, гидродвигатель с электрогидравлическим усилителем двухстороннего действия, плунжер гидродвигателя, кинематически связанный через упругий элемент с амортизируемой и стабилизируемой массой, и корпус силового цилиндра гидродвигателя, который присоединен через упругий элемент к неамортизированной массе - источнику кинематического возбуждения, преимущественно к оси колеса или раме машины, согласно изобретению система активной виброзащиты и стабилизации снабжена контроллером, формирующим закон управления на основе заданных, например в интерфейсе системы, эталонных свойств движения и текущего состояния амортизированной и стабилизируемой массы и плунжера гидродвигателя, один из входов контроллера через датчик ускорений присоединен к амортизируемой и стабилизируемой массе, а другой вход через токосъемник корпуса силового цилиндра гидродвигателя и ламели двухстороннего штока электрически соединен с потенциометром обратной связи, фиксирующим в каждый момент времени положение плунжера силового цилиндра гидродвигателя, при этом выход контроллера соединен с входом электрогидравлического усилителя.
Технический результат изобретения обеспечивается снижением ускорений в задаче виброзащиты корпуса и водителя транспортного средства, а также высокой точностью стабилизации положения корпуса амортизируемого объекта относительно положения статического равновесия.
Изобретение поясняется чертежом, где изображен общий вид системы.
Система активной виброзащиты и стабилизации иллюстрируется на примере конструкции подвески транспортного средства, которая содержит датчик 1 ускорений амортизируемой и/или стабилизируемой массы 2 (корпус, рама, кабина, сиденье водителя и пр.), пассивной подвески 3, которая может содержать упругий элемент, например, пневматический или пневмогидравлический и амортизатор, гидродвигатель 4, плунжер 5 гидродвигателя 4, токосъемник 6, изолятор 7, переходной цилиндр 8, ламели 9, сайлент-блок 10, характеризующий жесткость крепления гидродвигателя 4 к неамортизированной массе 11, в качестве которой может быть колесо, каток или рама транспортного средства при виброзащите водителя, датчик 12 положения плунжера 5 гидроцилиндра 4, например, в виде потенциометра обратной связи, электрогидравлического усилителя 13, контроллера 14 и интерфейса 15 для задания свойств эталонного движения амортизированной и стабилизируемой массы через контроллер 14.
Система активной виброзащиты и стабилизации работает в адаптивном режиме. Контроллер 14 формирует сигнал u адаптивного управления. При появлении сигнала и управления на обмотках преобразователя электрогидравлического усилителя 13 появляется ток, который приводит к смещению q5 золотникового распределителя. В результате производится прецизионное перемещение q6 штока 5 гидроцилиндра 4 вместе с амортизированной и/или стабилизированной массой 2. При перемещении штока 5 также перемещаются ламели 9 потенциометра 12, что приводит к появлению в цепи обратной связи напряжения  , пропорционального этому смещению. Оценки ускорения q7 амортизируемой массы 2, перемещения
, пропорционального этому смещению. Оценки ускорения q7 амортизируемой массы 2, перемещения  плунжера 5, а также желаемые свойства эталонного движения амортизируемой массы 2 с интерфейса 15 являются входной информацией для контроллера 14, который формирует управление в соответствии с заданными интерфейсом 15 свойствами движения амортизированной и/или стабилизированной массы.
плунжера 5, а также желаемые свойства эталонного движения амортизируемой массы 2 с интерфейса 15 являются входной информацией для контроллера 14, который формирует управление в соответствии с заданными интерфейсом 15 свойствами движения амортизированной и/или стабилизированной массы.
Описанная выше работа системы по изобретению является упрощенной и в ней не показаны фильтры с датчиков информации, аналого-цифровые и цифроаналоговые преобразователи, элементы гидропривода и пр. Однако новая система позволяет проиллюстрировать основные особенности технологии активной виброзащиты и стабилизации.
Упрощенная математическая модель новой конструкции системы активной виброзащиты и стабилизации по изобретению для одной опоры транспортного средства имеет вид:
 ,
,







 Здесь f(.) - желаемые свойства движения амортизированной и/или стабилизируемой массы; Фj(.) - известные операторы (j=0, 1, 2, 3); kx, Тx - соответственно коэффициент усиления и постоянная времени электрогидравлического преобразователя; kz, Тz - коэффициент усиления и постоянная времени силового исполнительного механизма; ks, Ts - коэффициент усиления и постоянная времени измерительного устройства; ke - параметр гидродвигателя, характеризующий утечки рабочего тела в режиме его нормального функционирования; k0z - коэффициент обратной связи по положению плунжера исполнительного механизма; Σ0, Σ1, Σ2 - "связки" сил, действующих соответственно на массы m1 и m2:
Здесь f(.) - желаемые свойства движения амортизированной и/или стабилизируемой массы; Фj(.) - известные операторы (j=0, 1, 2, 3); kx, Тx - соответственно коэффициент усиления и постоянная времени электрогидравлического преобразователя; kz, Тz - коэффициент усиления и постоянная времени силового исполнительного механизма; ks, Ts - коэффициент усиления и постоянная времени измерительного устройства; ke - параметр гидродвигателя, характеризующий утечки рабочего тела в режиме его нормального функционирования; k0z - коэффициент обратной связи по положению плунжера исполнительного механизма; Σ0, Σ1, Σ2 - "связки" сил, действующих соответственно на массы m1 и m2:







где Рji(.) - известные функции, в общем случае нелинейные.
В системе (1) первые четыре уравнения - уравнения движения масс m1 и m2; пятое - уравнение усилителя-преобразователя (золотникового распределителя): шестое - уравнение исполнительного механизма (гидроцилиндра двухстороннего действия); седьмое - уравнение измерительного устройства. Как видно из последнего, наблюдаемой является ускорение амортизированной массы. Другие производные этой переменной, используемые в алгоритме управления, идентифицируются. Уравнение датчика ускорений записано для простейшего случая и может быть уточнено при необходимости. Уравнение датчика перемещений исполнительного механизма является статическим и поэтому его уравнение не приводится.
Роль функционала Ф1 в регуляторе (2) состоит в придании управляемой системе желаемых свойств движения. Функционал Ф2 отражает фактическое динамическое состояние системы. Функционал Ф3 отражает состояние исполнительного механизма. Роль функционала Ф0 состоит в ограничении сигнала управления, когда это требуется. Первый член в выражении (2) компенсирует ослабление сигнала управления при введении априори отрицательной обратной связи по сигналу, соответствующему выходной переменной исполнительного механизма (либо относительному смещению амортизированной и неамортизированной масс). Если обратная связь не используется: k0z=0.
Благодаря слаженной работе в каждый момент времени всех "членов команды" при использовании нелинейных назначенных свойств движения регулятор (2) сочетает высокое быстродействие и точность без перерегулирования. При этом компенсируются собственные движения системы, отличные от желаемых, а также недостатки используемых исполнительных механизмов.
Управление в соответствии с алгоритмом (2) адекватно аппаратным средствам современной цифровой техники и гарантирует асимптотическую устойчивость управляемой системы. При этом не требуется проведения параметрической оптимизации для определения параметров алгоритма управления: их значения вычисляются точно без привлечения численных методов. При использовании нелинейных желаемых свойств движения сочетаются высокая точность и быстродействие без перерегулирования. Кроме того, обеспечивается устойчивость и качество функционирования, близкое к потенциальным возможностям управляемых систем.
Управление осуществляется в последовательные моменты времени T[j-1], T[j], T[j+1] таким образом, что соответствующие управляемые переменные стремились к заданным командным величинам по оптимальной траектории, являющейся решением уравнений эталонного движения. Используемые в регуляторе (2) ненаблюдаемые переменные идентифицируется.
Современный уровень развития техники и информационных технологий позволяют реализовать новую конструкцию системы активной виброзащиты и стабилизации с достижением технического результата, используя, например, среду CoDeSys для программирования контроллеров [3].
Промышленное освоение изобретения предполагается в условиях Беларуси и стран СНГ.
Источники информации
1. Фурунжиев Р.И., Хомич А.Л. Регуляторы нового поколения для снижения колебаний мобильных машин. Вестник военной Академии Республики Беларусь. №4(17) 29 декбря 2007 г. С.133-139.
2. Шарапов В.Д. Активные подвески транспортных средств. - Рига. РВПУ, 1980. - 262 с.
3. Руководство пользователя CoDeSys V3. Установка и первый запуск. Редакция 3.0. [http://www.codesys.ru/3s/Visu1.htm].
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ СИСТЕМАМИ | 1997 |
|
RU2153697C2 |
| Автомат-стабилизатор | 1982 |
|
SU1049271A1 |
| Устройство для управления системой виброзащиты сиденья транспортного средства | 1982 |
|
SU1025540A1 |
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2103191C1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Система управления активными подвесками многоосного транспортного средства | 1983 |
|
SU1150103A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| Способ защиты от вибрации и устройство для его осуществления | 2017 |
|
RU2669914C2 |
Система относится к области машиностроения и служит для управления колебаниями амортизируемой массы и стабилизации ее статического положения. Система включает подвеску, содержащую гидродвигатель с электрогидравлическим усилителем двухстороннего действия. Плунжер гидродвигателя кинематически связан через упругий элемент со стабилизируемой массой. Корпус силового цилиндра гидродвигателя присоединен через упругий элемент к оси колеса или раме машины. Система снабжена контроллером, формирующим закон управления на основе заданных эталонных свойств движения и текущего состояния стабилизируемой массы и плунжера гидродвигателя. Один из входов контроллера через датчик ускорений присоединен к стабилизируемой массе, а другой вход через токосъемник корпуса силового цилиндра гидродвигателя и ламели двухстороннего штока электрически соединен с потенциометром обратной связи. Потенциометр фиксирует в каждый момент времени положение плунжера силового цилиндра гидродвигателя. Выход контроллера соединен с входом электрогидравлического усилителя. Достигается снижение ускорений и высокая точность стабилизации положения корпуса амортизируемого объекта. 1 ил.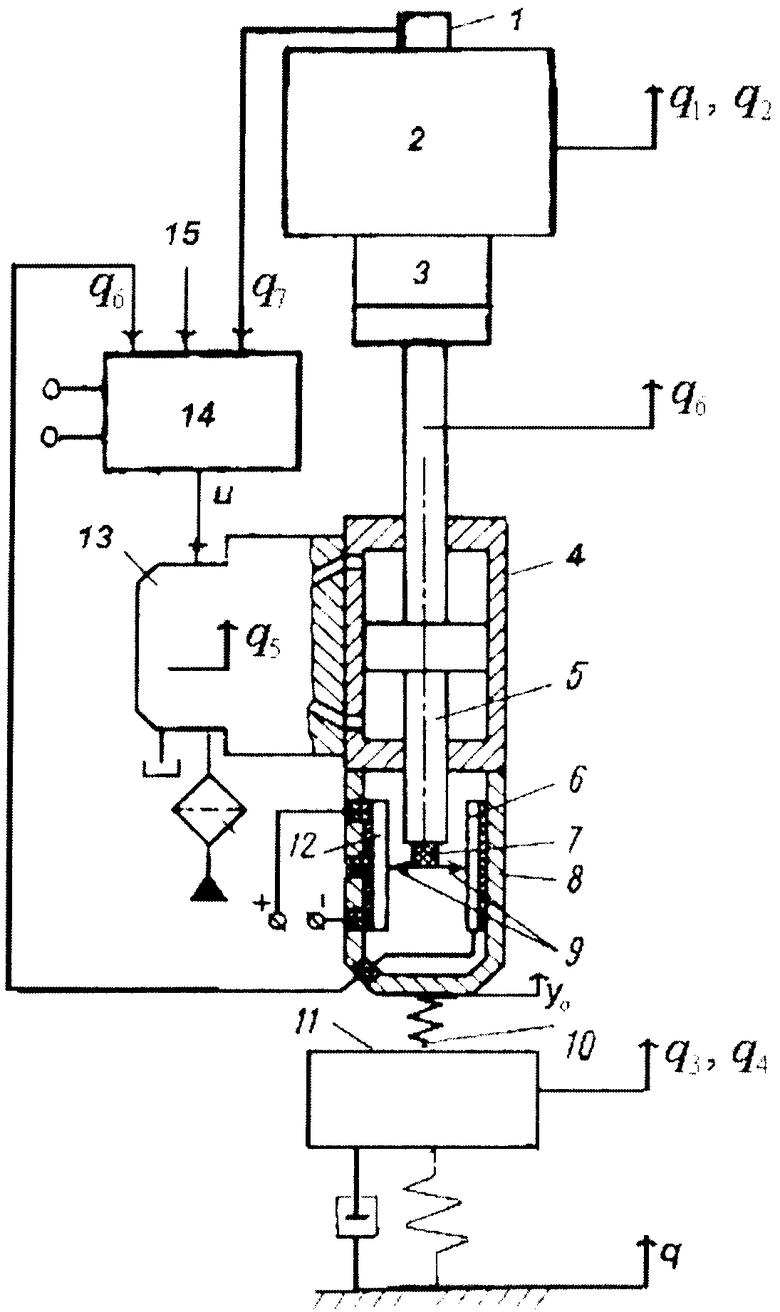
Система активной виброзащиты и стабилизации, включающая подвеску амортизируемой и стабилизируемой массы, содержащую амортизируемую и стабилизируемую массу, гидродвигатель с электрогидравлическим усилителем двухстороннего действия, плунжер гидродвигателя, кинематически связанный через упругий элемент с амортизируемой и стабилизируемой массой, и корпус силового цилиндра гидродвигателя, который присоединен через упругий элемент к неамортизированной массе подвески - источнику кинематического возбуждения подвески, преимущественно к оси колеса или раме машины, отличающаяся тем, что система снабжена контроллером, формирующим закон управления на основе заданных эталонных свойств движения и текущего состояния амортизированной и стабилизируемой массы и плунжера гидродвигателя, один из входов которого через датчик ускорений присоединен к амортизируемой и стабилизируемой массе, а другой вход через токосъемник корпуса силового цилиндра гидродвигателя и ламели двухстороннего штока электрически соединен с потенциометром обратной связи, фиксирующим в каждый момент времени положение плунжера силового цилиндра гидродвигателя, при этом выход контроллера соединен с входом электрогидравлического усилителя.
| ШАРАПОВ В.Д | |||
| Активные подвески транспортных средств | |||
| - РИГА: РВПУ, 1980 | |||
| Автоматический переключатель для пишущих световых вывесок | 1917 |
|
SU262A1 |
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР ПОДВЕСКИ АВТОМОБИЛЯ | 2002 |
|
RU2297561C2 |
| US 2001033047 A1, 25.10.2001 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ СИЛЬФОНОВ ИЗ ПОЛИТЕТРАФТОРЭТИЛЕНА | 2006 |
|
RU2311583C1 |

